远程测控技术在轮式起重机测试上的应用
2019-06-12
江苏徐州重型机械有限公司 江苏徐州 221004
随着轮式起重机向大型化方向发展,起重机系统越来越复杂[1],扩展工况越来越多,市场对起重机的可靠性要求也越来越高,这些对轮式起重机的测试工作提出了更高的要求。当前大型轮式起重机的一些测试工况较为危险,作业空间较大,传统的测试系统已经不能满足测试工作的需求,而远程测控系统的应用将很好地解决这一问题。
目前,远程测控系统已经在许多行业得到了广泛应用[2-3],而在工程机械尤其是起重机现场测试方面的应用才刚刚起步。远程测控系统可以通过现场总线网络如以太网、CAN总线将分布在现场的各测试设备连通,形成一个测试设备网络,达到资源共享和集中管控的目的,实现多台设备协同工作,测试人员远程操作监控数据。在起重机多系统测试中,引入远程测控技术建立远程测控系统,根据实际测试需求实现多个测试设备就近测试,解决了测试布线和测试设备放置困难等棘手问题,极大地提升了测试布点空间;同时,远程测控技术允许测试人员远离测试现场远程操作,从而扩展了起重机作业空间,基本消除了空间对测试工况的限制,也大大提升了测试人员的工作安全性。
1 技术构架
本文中远程测控系统以以太网为主通讯网络,传输各远程测控设备的实时采集数据;起重机控制器通讯以CAN总线为主,因此选用CAN总线为辅通讯网络采集起重机信号。整体构架如图1所示,主要包含3个部分:现场层、通讯层和测控层。
1.1 现场层
现场层主要是远程测控设备通过CAN总线读取起重机控制器运行数据,通过传感器读取起重机各个系统模拟量和数字量。
1.2 通讯层
远程测控上位机通过以太网与现场各个远程测控设备进行数据交互,按照测试需求远程测控设备,将现场采集的各类数据通过以太网传送到远程测控上位机上。
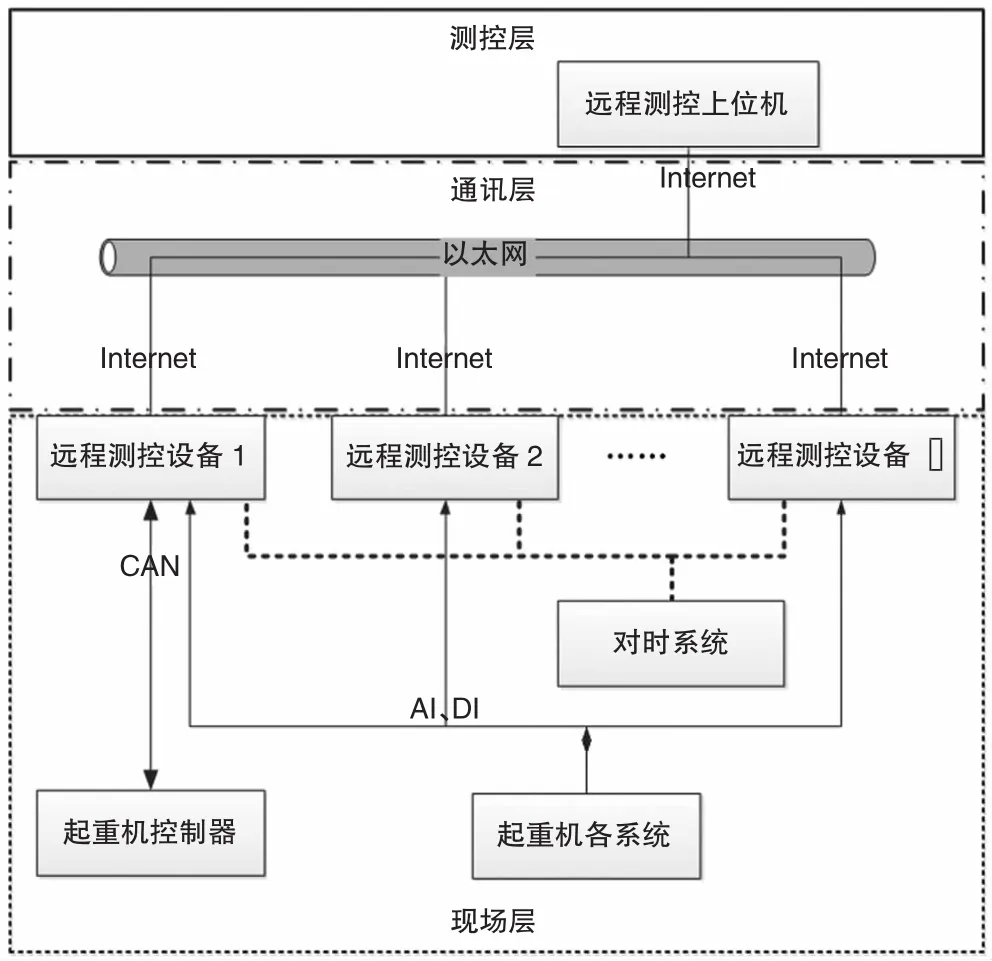
图1 远程测控系统技术构架
1.3 测控层
测控层主要包含远程测控上位机。测控上位机主要完成测试任务、采集内容、采集通道、采样率等内容的设置,测试数据的实时显示,测试数据的保存、分析、上传数据库等工作。
测试人员通过测控上位机远程操作现场各个远程测控设备,进行采集和测试数据的进一步操作。
2 硬件系统
硬件系统主要包含远程测控设备和远程测控上位机。
2.1 远程测控设备
在起重机测试点相对集中的区域设置远程测控设备完成该区域的数据采集,远程测控设备要求体积小巧,数据采集主要是模拟量、数字量和CAN信号;同时要求有以太网、CAN通讯功能,时间同步接口等。根据以上分析,基于NI CompactRIO系统完成远程测控设备设计,具体硬件配置选型要求表1所求。
2.2 远程测控上位机
远程测控上位机采用常规测控系统常用的研华工控机610H,具体配置如下:
▶ 机箱:研华610H(300W电源)
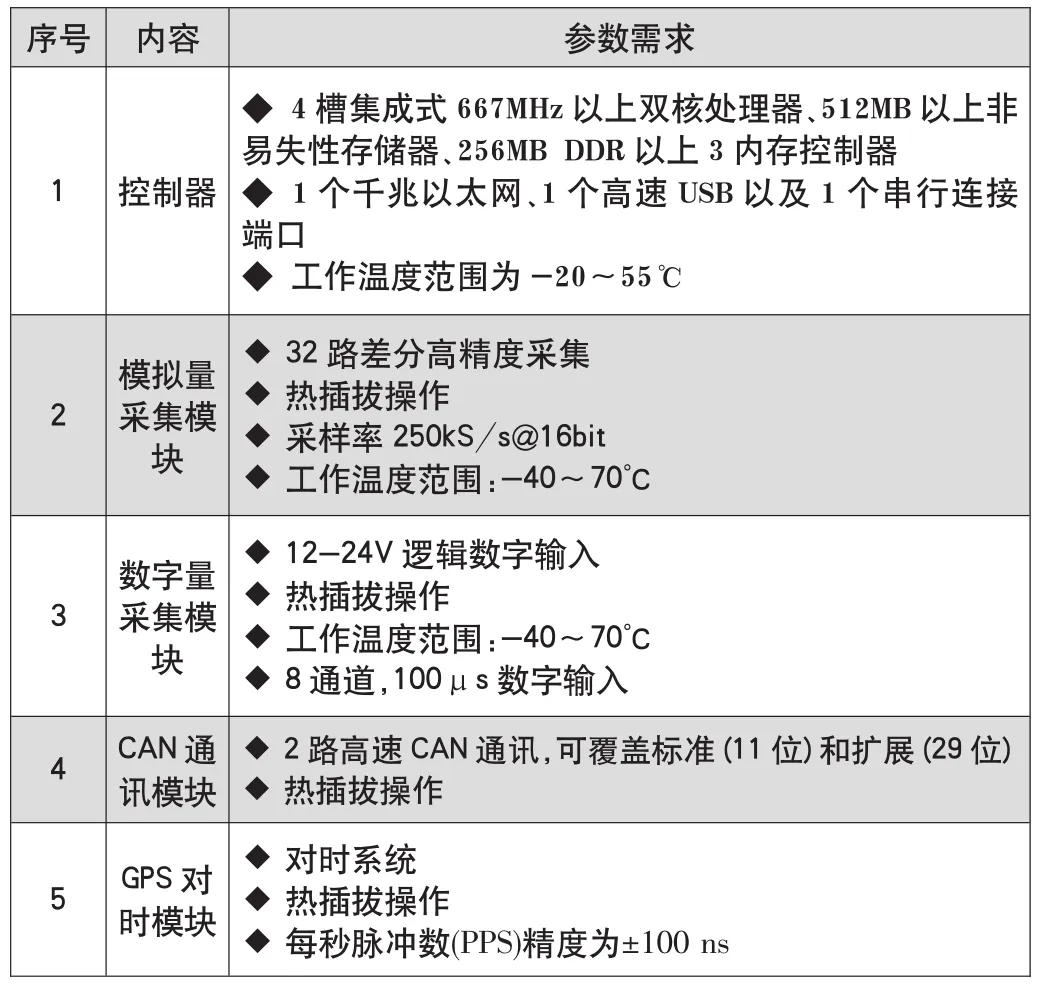
表1 远程测控设备参数需求明细表
▶ 主板:研华H61工业ATX主板AIMB 701
▶ CPU:Intel 酷睿i5 2400(四核3.1G)
▶ RAM:DDR3 三代4G内存
▶ 显卡:独显,研华 96VG-1G-PE-LE2
▶ 操作系统:win7
2.3 对时系统
对时系统主要功能是确保远程测控系统内所有远程测控设备的时间采用同一个时间点,本文使用NI 的C模块中GPS同步模块为整个系统提供精确的时间同步。
3 采集和远程传输技术设计
本文中的远程测控技术重点功能是实现数据采集并远程传输,本章针对这两点说明本系统采用的创新技术。
3.1 CAN节点采集技术
CAN节点采集的关键点是波特率的设置和数据包解析。CAN模块带有波特率设置功能,但是在具体使用时,会出现丢包现象,因此根据CAN采集模块的硬件特性并结合长期设计经验设计出本系统特有的波特率驱动技术。在实际使用中,采集人员只需在人机界面中写入所需要的波特率,系统底层软件将按照波特率驱动技术计算相关参数并驱动硬件区达到相应效果。波特率驱动技术包含概念如下:
◆位时间(Bitt)——CAN模块传输一位数据需要的时间,其倒数是波特率(BitRate);
◆波特率(BitRate)——每秒钟传输的数据位数;
◆时间冲量(Tq)——CAN模块内部时钟,在本系统中需要结合CAN模块和控制器处理时间的原子单位获取,设置不同差异较大。
根据CAN2.0规范,结合本系统的波特率驱动技术将位时间分成三段,如图2所示。
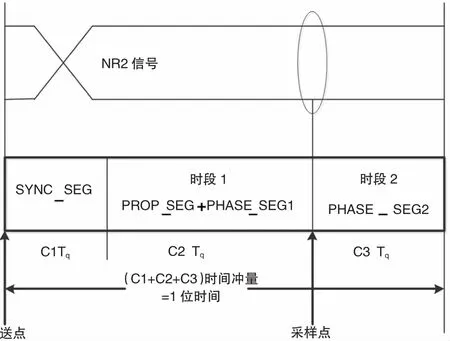
图2 位时间Bitt与时间段的关系图
具体说明如下:
◆SYNC_SEG——一个长度固定的时间冲量Tq本系统根据经验设为C1个时间冲量Tq;
◆时段1TSG1——包含CAN标准的PROP_SEG和PHASE_SEG1,通过设置参数TSG1完成,本系统根据经验设为C2个时间冲量Tq;
◆时段2TSG2——包含CAN标准的PHASE_SEG2,通过设置参数TSG2完成,本系统根据经验设为C3个时间冲量Tq;

综上,位时间Bitt使用若干个时间冲量Tq时钟组成,公式如下:式中,C1、C2、C3——分别为根据经验获得的一个整数数集空间,根据不同波特率需求有不同的整数组合。
波特率的计算公式如下:

式中,BP——可设置整型参数,根据不同波特率需求选取不同的参数;
fCANCLK——CAN模块的时钟,可选用系统时钟也可选用FPGA时钟。
3.2 FIFO实时传输技术
各远程测控设备采集的实时数据量大、种类多,如何避免远程传送给上位机时丢失数据,是本系统的关键点和难点。本系统设计基于网络变量的方式,设计FIFO实时传输技术具体如图3所示。
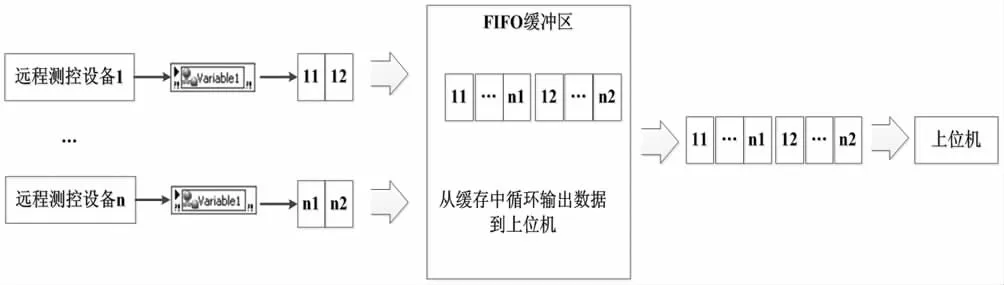
图3 FIFO实时远程传输液技术示意图
以轮询的方式将各个远程测控设备采集的实时数据放入FIFO队列中,为防止系统读/写速度的临时波动引起数据丢失问题,引入FIFO缓冲区。上位机按照既定的读取速度从FIFO缓冲区中读取数据显示在人机界面中,FIFO缓冲区中的数据是循环发送到上位机的读取队列中的。
FIFO缓冲区深度是整个FIFO实时传输技术的核心点,其设计若不合理将会影响整个FIFO实时传输的稳定性,导致上位机实时显示数据出现间断或者失真,从而导致重大错误。
FIFO缓冲区深度设计原理如下:

式中,C4——根据经验值获得的整型参数区间;
SRn——远程测控设备n的采样率,一般远程测控设备的采样率数值都是一致的;
SPn——远程测控设备n的采集通道;
CANn(b)——远程测控设备n的采集数据转换为6个32为整数数据后的数据量。
4 软件系统设计
软件部分是在labview平台上开发的程序[4],其设计按照模块化原则,按功能分类主要包含以下模块:用户管理模块、采集设置模块,传感器配置模块,实时数据显示模块,数据文件操作模块,数据分析模块。具体内容如图4所示。
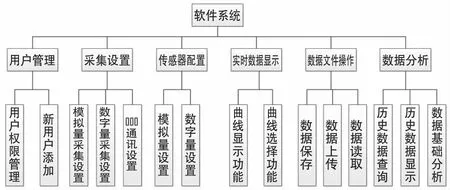
图4 软件功能模块图
在软件运行上采用多线程并行运行技术,可实现资源的合理分配,保证整个系统的高效运行。
5 远程测控数据采集交互界面
远程测控数据采集交互界面如图5所示,具体功能如下:
▶ 在“开始存储”、“暂停存储”、“停止存储”按钮功能区,设置了互锁功能,防止用户误操作导致数据存储不成功;
▶ 实现数据自动实时显示;
▶ 存储数据的过程中,页面中依然可以实现实时采集数据的显示;
▶ 点击“开始采集”,开启板卡采集,在波形图区域将显示测试曲线;
▶ 随时都可以点击“开始存储”,将采集数据存储到指定区域;
▶ 点击“暂停存储”,在波形图区域显示的测试曲线将静止;
▶ 点击“停止存储”,板卡采集停止,存储数据停止,在波形图区域显示的测试曲线依然实时显示;
▶ 点击退出系统按钮将推出整个软件并提示是否确定要推出软件。
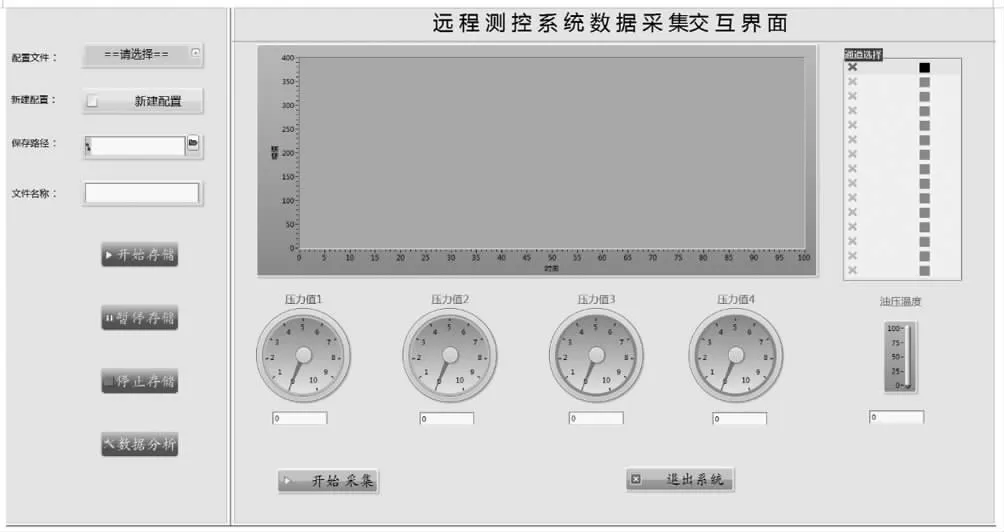
图5 远程测控系统数据采集界面
6 总结
本文针对汽车起重机测试工作的瓶颈问题,引进远程测控技术,以NI CompactRIO系统为硬件系统,基于以太网、CAN网络设计远程测控网络。该远程测控系统硬件系统构架清晰简洁,易实现,通用性强;软件系统模块化设计,采用并行技术,运行效率高;操作界面简洁,系统响应快,操作灵活便捷。该远程测控系统改变了传统的测试方式,测试设备分布放置,多台设备协同工作,实现资源共享和集中管控,实现测试人员远离测试现场,扩展测试空间拓展测试工况,提升测试作业安全性和测试安全性,在实际应用中取得了良好的效果。