基于KL26的目标定位智能车系统
2019-06-09刘千彭添强王天正李恒
刘千 彭添强 王天正 李恒

摘 要:文章设计一个以KL26 MCU为核心,OV7725摄像头作为传感器的一个能自动寻找目标的智能车系统。此设计模仿工业现场的货车自动寻找目标的过程。
关键词:KL26;图像处理;智能车
中图分类号:TP23 文献标志码:A 文章编号:2095-2945(2019)17-0036-02
Abstract: In this paper, an intelligent vehicle system with KL26 MCU as the core and OV7725 camera is designed, which can find the target automatically. This design imitates the process of automatic target search for trucks on the industrial site.
Keywords: KL26; image processing; smart car
引言
随着智能化发展,可将图像处理技术引入工业现场。在工业现场可利用无人货车自动寻找目标进行作业。此系统模拟工业现场,将发红外光的物体作为目标,利用小车进行目标定位并追踪。
1 系统概述
本系统以KL26为核心,由避障模块,速度采集模块,摄像头模块,蓝牙模块,人机交互部分和电源模块组成。
2 系统硬件设计
2.1 系统硬件总体设计
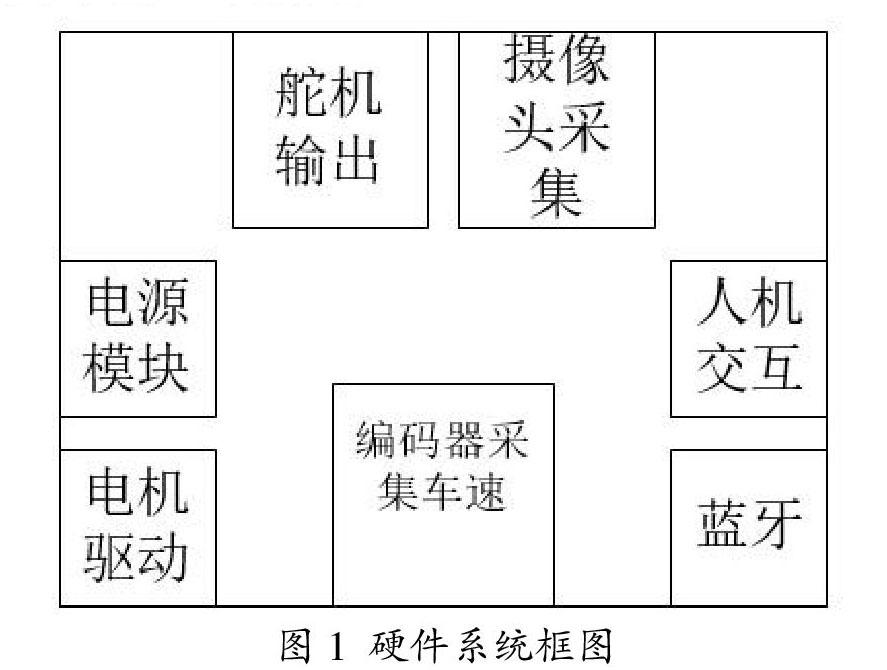
系统硬件框图如图1所示,本系统以KL26为核心,将系统硬件结构分为电源,摄像头,蓝牙,人机交互,速度采集,舵机,电机驱动模块。
2.2 电源模块设计
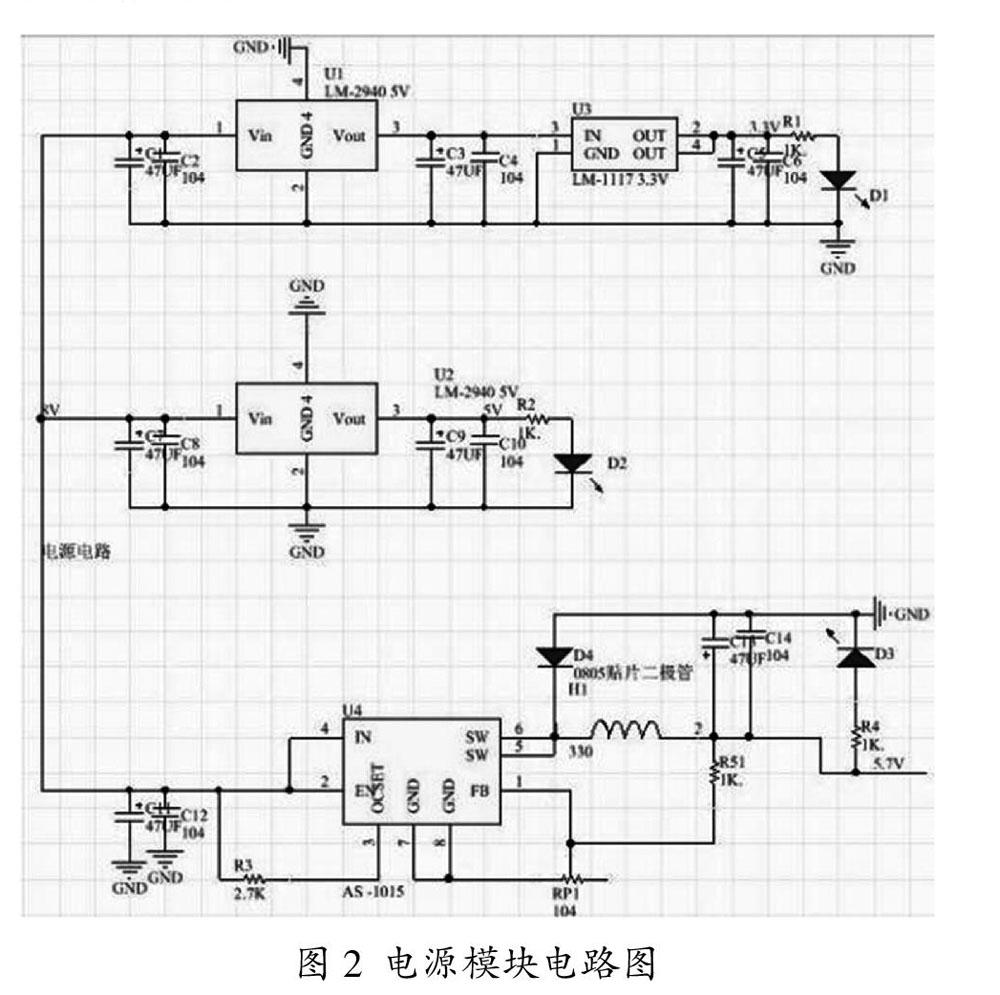
电源供电模块对于整个系统起到了至关重要的作用,各个模块都需要供电,所以须设计一个能够稳定给该系统供电的电源模块。小车系统中单片机需3.3V供电,摄像头传感器5V供电,舵机5.7V供电,编码器5V供电,红外对管5V供电,蓝牙5V供电,直流电机可以直接用7.2V供电。考虑到需供电的各个模块所需电压不一样,先由电池7.2V经LM2940转换到5V,为摄像头及红外对管供电,再由这5V经AMS117转到3.3V给单片机供电。由于编码器要求供电稳定,故由电池7.2V经LM2940转到5V单独为编码器供电。舵机要求供电6V,所以采用AS1015使电池输入7.2V转为4V到6.5V可调的电源给舵机供电。电源模块电路图如图2所示。
图2 电源模块电路图
2.3 电机驱动电路设计
采用BTS7960半桥驱动芯片驱动电机,通过单片机控制输出PWM波的占空比来控制半桥的开断以达到控制电机转速的目的。单片机输出的4路PWM波经过74HC541缓存成为峰值为5V的PWM波来驱动BTS7960控制其开断从而控制不同的BTS7960芯片。2个芯片控制一个电机,从而控制2个电机。驱动电路如图3所示。
3 系统软件设计
3.1 系统程序框图
程序流程图如图4所示。
3.2 图像处理
首先用中值滤波算法对采集回来的图像进行滤波。由于使用的摄像头是硬件二值化,故不用对采集回来的图像再次进行二值化,提高了图像处理的速率。对目标进行特征提取,因为目标发出特定波长的红外线,故在摄像头上加特定波长的滤光片即可将目标特征采集回来,遍历每行像素点时,如果发现黑像素点的下一个像素点是白色,那么即认为这个跳变点是目标的边界,如此遍历整個二值化图像的像素点,提取目标的边界并计算出目标中线所在的列数作为舵机的设定值。
3.3 舵机控制
舵机是控制小车系统运动方向的执行机构。此系统用PID算法闭环控制舵机追踪目标。考虑到此控制系统具有较大的惯性,故在控制算法上选用PD调节器对系统进行控制,微分控制会对系统进行超前控制,一旦系统有较大的偏差那么系统输出就会立刻变大,从而克服了系统的惯性作用。模拟系统PD调节器的公式如公式(1)所示。
式中,P(t)-调节器的输出信号(此系统的输出PWM占空比);e(t)-调节器的偏差信号(此系统的采集图像的目标中值和摄像头中线的偏差);Kp-调节器的比例系数;Td-调节器的微分时间。
经过离散后的公式如(2)所示。
经过实地调试选择合适比例系数和微分系数,只要在系统追踪目标的时候不发生抖动,并且当目标突然变换时,系统最终能够收敛,那么参数即选定完毕。
3.4 电机控制
此系统对电机控制采用开环控制,直接对电机驱动输入PWM脉冲,改变脉冲占空比,改变电机的速度,此系统用拨码开关设定高速,中速,低速三个速度挡位,从而适应不同的环境和要求。
3.5 人机交互设计
此系统用OLED和按键作为人机交互界面,内置菜单设置系统相关参数以及显示图像的功能,方便使用者进行调试。人机界面如5所示。
4 结束语
本文设计一种基于KL26的图像目标定位系统,从硬件和软件方面完概述系统设计。综上,此系统定位可靠准确,可以实现基于图像的自动定位追踪目标的功能。
参考文献:
[1]潘新民,王燕芳.微型计算机控制技术[M].电子工业出版社,2012,2.
[2]卓晴,黄开胜,邵贝贝.学做智能车[M].北京:北京航空航天大学出版社,2007.
[3]蔡述庭.“飞思卡尔”杯智能汽车竞赛设计与实践[M].北京:北京航空航天大学出版社,2012.
[4]马涛,姚哲,于星楠.青岛理工大学信标二队技术报告[R].2016.
