基于STK的航空反潜仿真平台研究
2019-06-08刘金荣
刘 峰, 刘金荣
(中国电子科学研究院,北京 100041)
0 引 言
航空反潜作战是军用航空器利用反潜探测设备对水下潜艇目标进行探测、识别和定位并利用反潜武器对其实施攻击的作战行动,是现代反潜的一个重要组成部分,主要用于海上反潜预警巡逻和侦察、为舰队出航提供反潜护航和参与诸种联合反潜作战行动[1],在各种反潜手段中,直升机反潜具有速度快、机动灵活、不易受攻击、作战效率高等优点[1],因此直升机反潜受到了世界各国海军的重视。
航空反潜是一项复杂的工程,以往的研究多聚焦于搜索阵形、决策算法、目标运动模型及武器攻击模型[2-4]等,相对而言,缺乏从实际作战过程中全流程、全要素、基于模型的动态可视化的系统性研究。现代反潜战争已经演化为多兵种联合的体系对抗,编队数量、平台性能、自然环境条件、传感器参数、目标特性等诸多因素对反潜的最后结果都会产生影响,采用分析建模的方式分析作战过程,往往容易限于局部环节,难以实现全局优化,系统工具包STK(System Tool Kit)软件是美国AGI 公司研制开发的一款商品化系统分析软件,可以快速方便地分析复杂的陆地、海洋、航空及航天任务,提供任务仿真过程控制精确的二维、三维视景显示功能,在航空航天飞行任务、覆盖分析和打击效果评估等方面具有重要的应用价值,此外STK 提供了便利的二次开发功能,允许用户扩展STK功能或将STK引擎集成到其他工程中,最大程度地满足用户的特殊要求,在空间态势仿真、无人机多任务仿真领域有着广泛应用[5-6],目前基于STK的航空反潜领域尚无太多探索。
本文以航空反潜实际应用流程为背景,综合考虑舰、艇、典型直升机平台参数、典型传感器及武器参数配置、构建了基于STK引擎的作战推演和效能评估基础平台,采用matlab实现了多种典型的搜索、跟踪、攻击算法并加以集成,完成了典型作战样式下的可视化流程推演和效能评估工作,可支持战术算法的迭代仿真和提炼,同时借助系统推演,有助于提炼出优化的作战流程,给各阶段任务指标权衡提供决策依据,最终实现全局反潜效能优化,对工程应用具有较大的实践意义。
1 系统设计思路
反潜直升机的在执行任务时,一般而言要经历航渡/出航-搜索-识别定位-跟踪-攻击-返航[1]过程,如图1所示。其中搜索是利用探测设备和手段发现潜艇的过程,由于潜艇可长时间在水下游弋加上所在的介质极为广阔又异常复杂,搜索经常占用反潜战的大部分时间,是反潜作战的首要环节;识别定位就是当传感器发现异常或疑似信号时,结合各种探测信息分析、判断是否为潜艇,确认后进行战术识别,是否为敌方潜艇,根据传感器获取的信息,进行目标潜艇位置计算;当传感器可持续获取目标位置信息时,即转入跟踪;攻击是当连续获取目标潜艇位置及运动要素后,根据反潜机导航信息、武器参数、占领攻击阵位,实施武器投放的过程,根据任务需要,还可进行再次搜索、进一步确认目标命中情况。
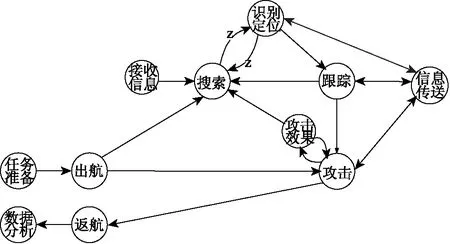
图1 典型的反潜作业流程图
航空反潜的效果取决于多种因素,包括:
(1)航空反潜平台性能:最大飞行速度、巡逻速度、最大起飞重量、作战半径、升限、爬升率、最大使用过载、最大盘旋过载等。
(2)机载搜潜设备作战效能指标研究:声纳浮标作用距离、工作寿命、吊声作用距离等。
(3)攻潜武器作战效能:引信完好率、自导半径、最大速度、单发命中概率、突防概率、毁伤概率、最大发射距离等。
(4)指控系统:搜索阵型、攻击时机选择、攻击武器选择、决策响应时间、传输时延、数据传输率、导航精度、通信距离、数据失真率、抗干扰系数等。
基于航空反潜作业流程复杂、制约因素众多等特点,要达到既定的使命任务,必须全面、系统性考虑作战要素,采用基于基础模型库以模块化方式构建仿真架构,便于系统配置扩展,满足不同任务、不同兵力、不同作战样式的仿真需求,实现特定作战场景的仿真推演。
2 仿真模型
基于模型的系统工程可方便表达,系统模型涵盖工程全生命周期,包括需求、分析、设计、验证、确认过程,各层级之间可贯穿与追溯[7],仿真平台中对模型进行集中统一管理,从而可以提高对模型的完善修正、调试和维护能力。
2.1 平台三维模型库
借助于STK工具三维、平面显示功能,可用3DS MAX/ProE软件制作经过Deep Exploration进行模型转换,制作典型航空反潜平台.mdl格式的三维模型。
2.2 平台运动模型库
借助STK航空器任务建模(AMM,Aircraft Mission Modeler)模块,设置反潜直升机的起飞、平飞、转弯、爬升、下降、降落等参数模型。
2.3 传感器模型库
传感器探测模型库主要包括以下3类模型。
(1)声纳浮标模型
包括浮标工作模式、浮标探测距离、工作寿命等和浮标搜索阵型等,其中浮标搜索阵型采用典型的直线拦截阵、圆形阵[8]等;
(2)吊放声纳探测模型
包括吊放声纳收放时间、工作模式、探测距离等,吊声搜索阵型采用典型扩展方形搜索、扇形搜索[2-3]等;
(3)搜索雷达模型
包括海面监视雷达水面状态潜艇探测距离、搜索阵型等。
2.4 武器模型库
主要包括空投鱼雷轨迹模型、自导模型等。
2.5 指控模型库
包括本机或编队搜索阵型、传感器选择、攻击时机选择、攻击武器模式选择、决策响应时间、武器攻击时机等。
2.6 潜艇模型
包括潜艇位置分布模型、航向分布模型和潜艇逃逸模式等,典型的位置按航速瑞利分布、航向均匀分布规律[8],潜艇逃逸模型按照更改航速、更改航向等逃逸[9]方式。
2.7 基础数据库
主要包括作战想定海域的地理、气象、水文、水声、电磁等战场环境数据,相关武器装备的技战术性能数据等
2.8 模型逻辑关系

图3 仿真平台设计架构图
系统模型库之间的接口关系如图2所示。仿真基础数据库为各个模型库提供基础数据服务;传感器模型主要完成对潜探测阵型、探测过程和探测信息的仿真;武器攻击模型完成武器射击诸元计算和武器发射控制弹道计算模型等,指控模型负责将传感器模型、平台运动模型、平台三维模型按照任务流程串联,调用实体仿真作业过程,驱动整个仿真场景运行,并根据传感器探测信息、武器挂载信息及任务执行情况,给出编队后续作业决策。

图2 仿真系统模型库之间关系
3 仿真系统实现
3.1 架构设计
仿真平台总体设计框架如图3所示,系统采用分层逻辑架构,自下而上分为基础资源层、基础服务层和业务层三部分;
(1)基础资源层
实现STKX Graphics Analysis模块、STK Analysis Interface、STK Object Model、AGI Map Control与AGI Globe Control的集成,完成仿真程序框架与STK仿真引擎初始化设置;
(2)基础服务层
基础服务层设计场景管理、对象模型管理、动画管理、日志文件管理、编队配置管理、作战流程管理、消息动态反射机制、中间件适配、链路信息编解码等模块;
(3)业务层
业务层实现典型航空反潜业务模块,包括吊声探测、浮标探测、武器攻击等,业务模块通过算法选择器与matlab实现数据交互,实现作业算法调度。
3.2 系统实现
3.2.1基础资源层
采用VC构建仿真工程,STK为用户提供了STK X方式和STK Object Model两种方式,其中STKX方式本质上让STK作为ActiveX控件集成到仿真框架中,实现对STK引擎的控制;STK Object Model方式是将所有对象数据进行封装,提供了标准的COM编程接口,供开发人员进行模型控制。
STK提供二维地图、三维地球显示控制功能。考虑仿真的灵活性及扩展性,同时采用两种方式集成STK引擎,实现仿真程序与STK引擎的交互命令、仿真场景及对象的动态控制等。
3.2.2基础服务层
仿真软件基于面向对象的MFC框架构建,除了提供常规的GUI界面外,还要实现后台基础数据、基础服务业务,包括:
(1)获取环境基础数据,包括任务区域海况、气象、水纹等信息;
(2)通过配置文件获取反潜装备各平台的活动范围、目标分布模型、责任区域、传感器、外挂武器等基础配置参数;
(3)通过消息动态反射模块,实现以各舰船、反潜直升机等平台的作业流程;
(4)空间对象建立(舰、机、艇、传感器)及约束参数,如航迹显隐、标签显隐、传感器覆盖区域、目标探测结果等;
(5)完成仿真场景的初始化及控制工作,包括世界时间、分析时间、单位设置、视角切换、视角缩放、场景播放、暂停、关闭、保存及与迭代控制等;
3.2.3业务层
如前所述,航空反潜典型的作业过程通常包括直升机出航(或航渡)、传感器搜索、吊放声纳跟踪确认、武器攻击和返航等阶段,根据不同任务具体差异,或任务执行中不同情况,反潜任务具体流程有一定的不确切性,实际完整的反潜过程可能包括上述典型作业过程或其若干组合,包括任务的区域、浮标阵型、目标接触情况及上级指挥组织意图的差异性,会影响实际反潜作业过程,如任务区域较小或浮标携带数量充足,可采用密布阵策略,或较为确切的获取了目标位置信息,可直接采用吊放声纳点水搜索,仿真系统采用了“作业模块化、流程动态化”的实现方式,即设置浮标布阵搜索、浮标侦听、吊放声纳搜索、武器攻击等作业模块,通过消息反射机制配置不同作业流程,实现作战样式的灵活配置,同时仿真平台内置指控模块,根据任务执行过程中编队导航参数、传感器状况、目标及武器状态等信息,实现作业流程的临机切换。
3.2.4matlab算法集成
考虑matlab算法开发效率高并具有对外兼容性和可扩展性,将仿真系统业务层的反潜作业算法采用matlab实现封装为单独的matlab算法集,具备模块化特点,便于其他平台重用。在这里我们将matlab算法集编译为C++库文件集成到STK仿真平台中。
3.2.5系统流程
仿真系统运行流程如图4所示,仿真程序完成初始化后,获取反潜直升机编队配置信息,包括直升机平台信息、编队数量、母舰参数、环境参数、传感器参数、目标或任务区域参数、武器配置参数,完成仿真场景初始化及相关模式设置,根据配置信息创建对象;采用消息反射机制,将平台作业流程映射到业务层的浮标搜索、雷达搜索、鱼雷攻击等业务模块,实现每个平台的全部业务流程驱动。
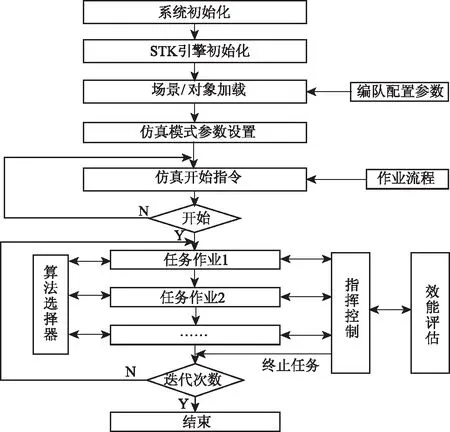
图4 系统流程图
同时,考虑航空反潜的战术灵活性及不确定性,仿真程序内置指控模块,当编队执行作业流程时,同时上报指控模块,后者根据反潜的具体任务、当前状态下获取的综合情报及反潜编队具备的作战能力发出相应的作战指挥决策命令,给出下一步行动指示,直到本次任务结束,进入下一次迭代。
4 典型过程推演
4.1 典型浮标搜索仿真
以舰载直升机前出应召反潜为想定任务,目标应召点距离母舰100 km,目标潜艇位置瑞利分布,方位均匀分布,被动声纳浮标作用距离3 km,直升机参照国外某典型的反潜机平台飞行性能,典型5枚浮标方阵[8]搜索概率为36%,典型9枚浮标方阵[9]搜索概率为61%,同样的前置条件,通过变更仿真平台中模型各要素参数,可得到定量搜索概率。

图5 浮标搜索过程典型场景

图6 典型浮标搜索与定位仿真结果
图7 浮标接触目标情况
4.2 典型搜索、跟踪与攻击仿真
在4.1设定应召反潜模式下,以典型的浮标圆形阵或吊放声纳扩展方形搜索,接触目标后采用吊放声纳跟踪定位确认,然后采用鱼雷攻击,浮标典型的性能参数3 km,吊放声纳典型探测距离设置为10 km,鱼雷典型的搜索弹道及自导范围0.5 km,经蒙特卡洛迭代后的结果如表1所示。

表1 典型搜索、跟踪与攻击仿真结果

图8 吊放声纳典型工作截图

图10 武器攻击情况
5 结 语
本文对基于STK的航空反潜作了一定探索,设计了航空反潜全要素、全流程的基础仿真平台,为航空反潜研究提供了新思路和方法,实现直升机运动参数模型、传感器探测模型参数、武器弹道模型参数可配置,作战流程静态灵活配置、动态自适应调整。通过不断优化迭代,最终可形成数字设计模型库,便于进一步开展战术战法研究,为新型反潜装备系统的方案论证提供了的有效技术手段,同时为部队反潜战术、战法及训练规划提供了较为重要的参考价值。
另外,考虑工程实施的需要,系统实现过程中对传感器探测威力、武器弹道及攻击模型及平台间通信进行了必要的简化,后续可考虑根据实际工作需要,扩展水声数据库、增加通信链路时隙约束等,持续迭代优化仿真平台。
