面向LoRa网络的基于维纳滤波的RSSI定位算法
2019-06-08莫建麟
莫建麟
(阿坝师范学院,四川 阿坝州 623002)
0 引 言
定位是物联网(Internet of Things, IoT) 的多数应用应用的基础。尽管全球定位系统(Global Positioning System, GPS)是解决多数定位问题的常用策略[1],但是利用GPS获取IoT内设备位置并不是最有效的方式。一方面,GPS成本高、功耗大;另一方面,GPS系统的室内定位性能差。
远距离无线电(Long Range Radio, LoRa)是由Semtech公司创建的低功耗局域网无线标准。它以功耗低、传输距离远而著称。目前,LoRa广泛应用于室外无线传输,覆盖范围可达到30 km~50 km。采用啁啾扩频调制(Spread Spectrum Modulation, CSS),LoRa实现了长距离、低功耗通信[2]。
长距离、低功耗的特性,使LoRa广泛在室外和室内IoT场景中广泛使用。此外,基于LoRa通信不仅可以用于数据传输,也可无需增加额外设备环境下计算节点位置。以GHz为工作频段,LoRa信号具有高的墙体穿透性,且对多径衰落也具有鲁棒性[3]。
目前的一些研究成果已证实,LoRa技术能够应用于定位系统[4],但是仍缺失有效的实验数据。研究人员对LoRa通信中基于到达时间(Time of Arrival, ToA)、到达时间差(Time Difference of Arrival, TDoA)、到达角度(Angle of Arrival, AoA)定位进行了一些研究工作。
然而,基于AoA定位算法要求天线阵列,而基于ToA/TDoA定位算法依赖于准确时钟,并且基于TDoA定位算法要求节点间同步。相比之下,基于接收信号强度指标(Received Signal Strength Indicator, RSSI)的定位算法实施简单,无需额外设备。
目前,针对LoRa通信中基于RSSI定位的研究工作较少。文献[5]针对室外噪声环境中的LoRa场景,分析了基于RSSI定位算法。而文献[6]针对LoRa室内应用,提出基于RSSI测距估计。此外,文献[7]的研究表明,在室内环境,LoRa能够提供可接收的定位误差。但是在室外环境,定位误差达到几百米。
因此,需设计合适的算法,提高基于LoRa系统内基于RSSI定位算法的精度。滤波技术,如粒子群、贝叶斯和Kalman滤波,常用于定位系统。通过滤除噪声环境内的噪声数据,提高定位精度。
为此,针对LoRa通信的室内和室外环境,提出基于维纳滤波的RSSI定位算法(Wiener Filter-based RSSI Localization, WFRL)。WFRL算法利用维纳滤波降低测距误差,提高定位精度。
1 LoRa物理层概述
LoRa技术通过改变物理层参数实现调制分集。这些参数包括:频度宽度B、扩频因子S和编码率Rc。其中,扩频因子S=log2Nc,Nc表示每个符号内的码片数[8]。
而调频率等于频度宽度B,因此一个符号的时长T等于2S/B。此外,LoRa物理层包含了一个转发错误校正码,它的编码率Rc等于4/(4+n),其中n∈1,2,3,4。由于一个符号包含S个信息比特位,信息速率Rb:
(1)
不同扩频因子S和编码率Rc,可形成10种物理层模式,如表1所示。WFRL算法就是充分利用模式的多样性,即在不同模式下,获取RSSI的测量值[9]。将这些RSSI值作为维纳滤波的输入,通过维纳滤波滤除噪声数据。表1中Sensitivity表示对信号的灵敏度。
2 WFRL算法
2.1 基于RSSI测距模型
先依据Friis传输等式建立RSSI值与距离d间关系,如式(2)所示,其中d是指接收端与发送端间距离。
P=-(10αlgd-A)
(2)
其中A表示当接收端与发送端距离为1m时,接收端所接收的功率,单位为dBm。而P为接收端所接收的功率。α为路径衰落指数。

图1 信号传输模型
依据式(2),估计距离d:
(3)
从式(3)可知,参数A和α对测距精度有影响。并且,不同的环境,它们的值并不相同。为此,WFRL算法利用LoRa不同模式下的RSSI值,训练这两个参数,进而获取LoRa信道特性[10]。最后,依据LoRa信道特性,并结合RSSI的均值测距,再利用定位算法估计节点位置。
2.2 基于维纳滤波的测距

(4)
依表1可知,LoRa有10种不同的模式。为此,可利用LoRa不同模式下RSSI的均值估计距离。即利用所测量的RSSI值的权重平均估计距离[11],进而提高测距精度。令Nm表示使用的LoRa模式数,且Nm≤10。
(5)
对式(5)进行数学变换:
(6)
引用权重矢量w=[ω1,ω2,…,ωNm],其反映了在LoRa不同模式下的权重系数。接下来,分析如何计算权重矢量w。
先建立距离对数的均方误差等式:
(7)
将式(6)代入式(7),再建立偏微分方程,如式(8)所示:
(8)
再利用霍夫方程(wiener-Hopf equation)求解式(8),可得:
(9)
其中RP={rP(k)}为自相关矩阵。其中rP(k)=E{Pj(i)P(i)},且k=j-。
而rd={rd(k)}为互相关矢量,其定义如式(10)所示:
rd(k)=E{[A0-lgd(i)]Pk(i)}
(10)
其中j,=1,2,…Nm。

2.3 质心定位算法
利用三角质心定位算法估计节点位置。图2显示了三角质心定位原理。先获取到三个锚节点的距离,三个锚节点(A、B、C)再以距离值建立三个圆。圆的交点(Xa,Xb,Xc)形成三角形,三角形的质心位置就是节点的位置。

图2 三角质心定位算法
2.4 定位模型
考虑如图3所示的定位系统,系统内有多个锚节点,这些节点已知自己位置。实际上,这些锚节点就是LoRa发射器,它们发射信号。而未知节点通过接收信号,估计与锚节点间距离。理论上,在二维平面内,未知节点只需获取与三个锚节点距离,就能估计自己的位置。
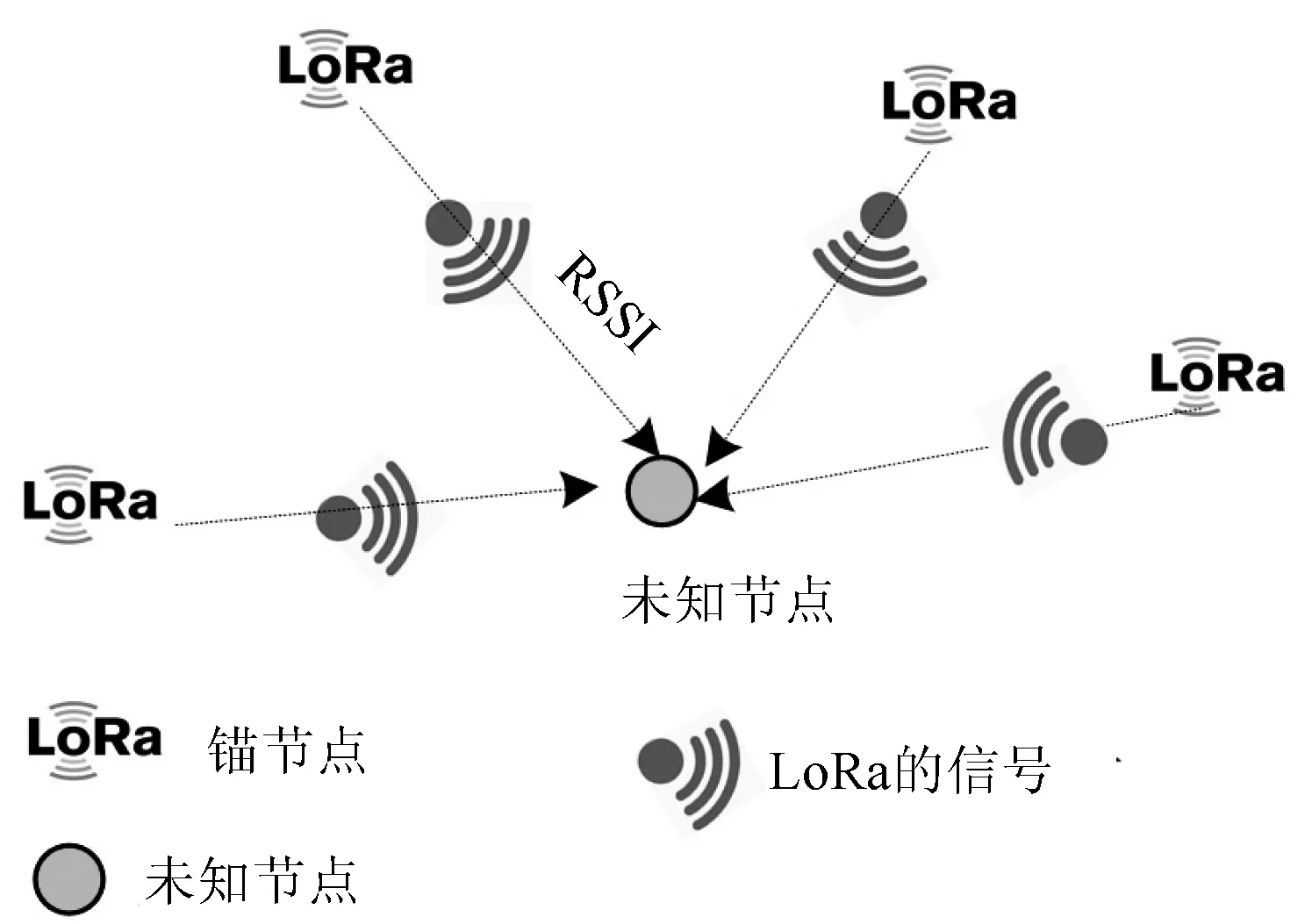
图3 定位模型
锚节点先以不同模式传输信号,未知节点利用(6)估计距离,获取了距离信息后,再利用三角质心算法估计位置。
3 性能仿真
3.1 信道特性分析
3.1.1场景建立
本节分析室内和室外两个场景下的信道特性,如图4所示。对于室内信道,考虑长为37 m的走廊,且走廊边上有几个房间。并考虑LOS和NLOS这两个信道环境。(1)LOS信道:将发射器和接收器均放在走廊里;(2)NLOS信道:将发射器放在走廊边上的房间里,接收器放在走廊。最初,发射器离接收器为5m,再以5m为一步长,将它们距离的拉长至35m。同时测量每种LoRa模式下的100个RSSI值,用于训练室内的LoRa信道特性。
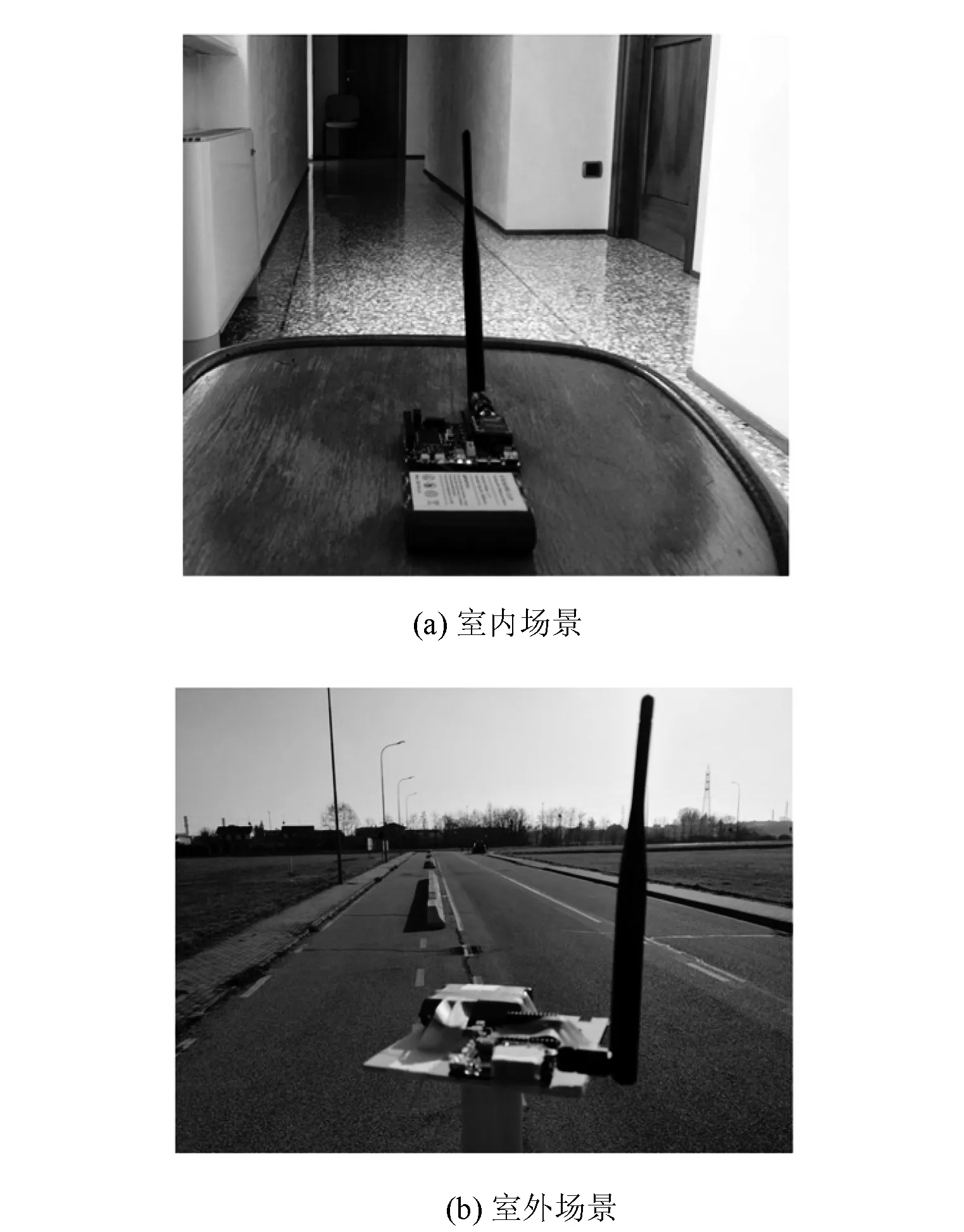
图4 室内和室外环境
在街道上测量LoRA信道特性。考虑330 m的街道,并将节点架在2 m上方。与室内环境一样,固定接收器,移动发射器。两个设备距离从20 m~330 m,步长为20 m。并采集不同距离下100个RSSI值,用于训练室外的LoRa信道特性。室外环境只考虑LOS情况。
3.1.2LoRa信道数据分析
表2显示了两个室内和室外环境下的RSSI值。选择了LoRa模式1、模式5和模式10三个通信模式下的参数A和α值。
表2 不同LoRa模下的A和α值
从表2可知,LoRa模式对参数A和α值较大影响,且存在小幅度范围内的波动。此外,同在室内环境下,NLOS信道下的衰落指数α大于LOS信道的衰落指数。这符合事实。
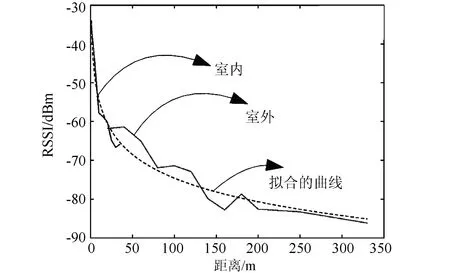
图5 RSSI值随距离变化曲线
将所收集的RSSI值进行拟合,形成RSSI值(dBm)与距离间的关系曲线,如图5所示。从图可知,室内长距离的RSSI值逼近于室外短距离的RSSI值。这就将室外和室内的信道特性拟合成一条曲线。此外,由于指数特性,距离越长, RSSI曲线越平。
3.2 性能对比分析
为了更好地分析维纳滤波处理RSSI性能,选择文献[12]的RSSI算法(标记为RSSI-A)作为参照。对比分析WFRL算法和RSSI-A的测距误差性能和定位误差性能。
表3显示了RSSI-A和WFRL算法对室内环境的测距误差。其中RSSI-A-1表示只利用LoRa模式1采集的RSSIs值方法;WFRL-1表只利用LoRa模式1采集的RSSIs值的维纳滤波方法;而RSSI-A-average、WFRL-average表示10个模式下的平均值。
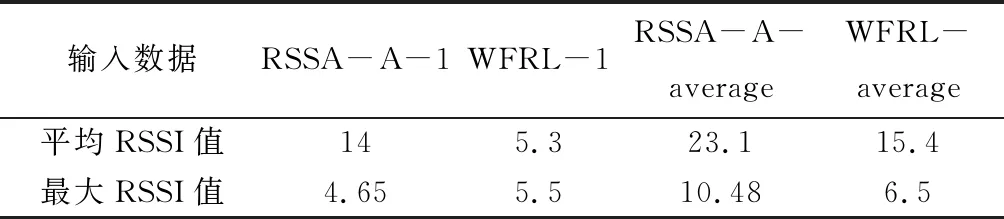
表3 测距误差(单位m)
表3显示了基于平均RSSI和最大RSSI数据下的测距性能。相比于RSSI-A算法,WFRL算法的测距误差得到有效控制。例如,在只利用LoRa模式1环境下,WFRL算法的测距误差为5.3 m,而RSSI-A算法的测距误差达到14 m。此外,相比于10种模式下的平均值,仅通过模式1获取RSSI值更有利于测距精度的提高。
图6显示了RSSI-A算法和WFRL算法的平均定位误差。从图可知,相比于RSSI-A算法,提出的WFRL算法在平均定位误差得到有效控制,这归功于测距精度的提高。这些数据表明,利用维纳滤波能够有效地滤除RSSI噪声数据。

图6 平均定位误差
4 结 语
针对LoRa系统的定位问题,提出了基于维纳滤波的RSSI定位算法WFRL。WFRL算法通过维纳滤波处理来自LoRa不同模式的RSSI值,进而提高了测距和定位精度。并通过实验测量了LoRa通信的室内和室外的信道特性,用数据证实:在LoRa系统内,基于RSSI测距能够获取可接收的定位精度。而利用维纳滤波可进一步提高定位精度。
