基于单片机控制舵机的调平装置设计∗
2019-06-06刘战峰
刘战峰
(太原科技大学 太原 030024)
1 引言
目前,调平系统被应用在多个领域,在军工领域,导弹发射车的调平系统[1];在建筑领域,需要测量空间的立体尺寸[2];在光学领域调平系统可以利用光的直线传播原理进行方向引导[3];调平系统还可以为实验室创造实验环境,调平系统被广泛运用到多个领域,在测量行业也有设计,测量系统,以及各种工程领域的调平,比如水平测距,汽车前照灯,激光发射仪[4]等。
常用的自动调平技术采用数字化的机械电子技术,实现了系统的自动化。目前大部分的设计主要集中在大型和中型设备上,对于方便我们实验研究的小型设备还不完善。比如在测量领域,学生实验室领域等。对于某些领域,由于系统承受的负载比较小,如果采用液压技术[5]会大材小用,再加上需要实现调节快,精度高的特点,所以采用电子式[6]。本系统采用高自动化的机械电子设计方案,采用机械调节理念,应用STM32微处理器和三轴陀螺仪相结合技术,通过伺服舵机旋转调节平面水平,是一种全新的调平系统。通过实验计算得出,系统不仅能达到高精度,少时间,而且生产成本也不高。
2 调平系统总体设计
调平系统基于STM32单片机设计,此款单片机集多个优良性能于一体,有多个串口功能,而且功耗比较低,内置嵌入式开发系统[7]。LSM303DLH三轴陀螺仪[8]用于测量重力加速度,PID算法[9~11]控制舵机旋转角度,舵机采用PWM波控制[12~14],数据采集需要进行数字平滑滤波消除误差,陀螺仪与单片机利用I2C协议[15~16]传输数据。
调平系统的设计结合了机械电子技术,在机械上实现了两个自由度的可控调节,在电子上实现了数电与模电相结合的优势,还利用了可以控制角度的伺服舵机作为调节载体,陀螺仪与单片机进行数字的采集和控制,再加上PID算法的快速响应,在速度和精度上为系统功能的实现提供了保障。
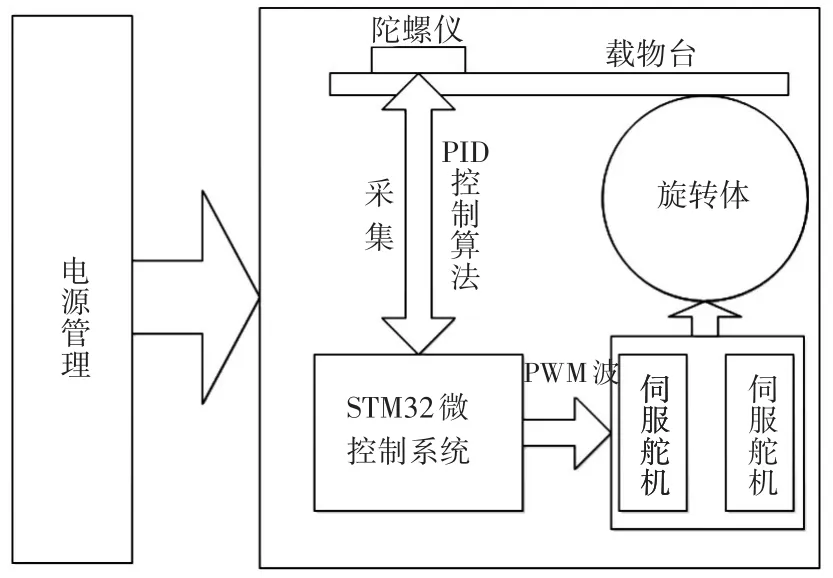
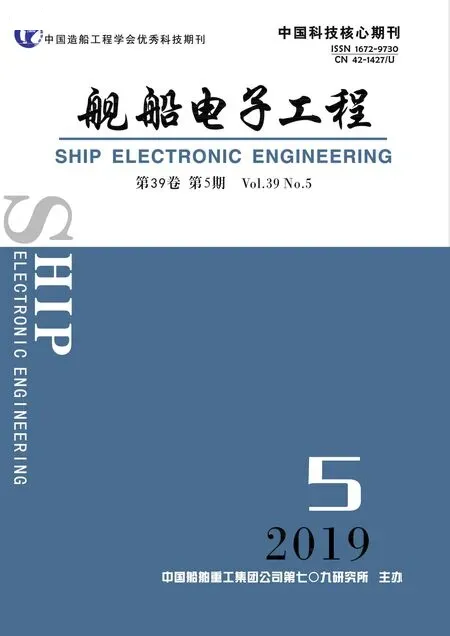
图1 调平系统构成
电源管理为整个系统提供电力支援,两个伺服舵机控制两个自由度的旋转体,最小角度包含于1024个数字位置平分108°,伺服舵机最小调节角度达到0.176°。系统在STM32微控制系统,伺服舵机旋转系统,陀螺仪反馈系统的控制下进行调平。
3 调平系统硬件设计
调平系统由两个伺服舵机,三个金属框架,和陀螺仪等元件组成。系统所用到的机械结构是由两个舵机作为旋转主动力,底端伺服舵机用金属框架和底板链接,底端伺服舵机利用圆盘与上端伺服舵机链接,实现了旋转体的两个自由度属性。上端伺服舵机通过圆盘与直角金属固定,直角固定架上面安装陀螺仪芯片。
旋转体工作原理:调平系统的底座固定伺服舵机A,首先伺服舵机A进行旋转,由于系统上部分整体连结在与伺服舵机A固定的圆盘上,所以伺服舵机A的旋转会导致系统上部分即伺服舵机B和陀螺仪以及支架的整体的旋转。然后伺服舵机B进行旋转,伺服舵机的旋转会带动直角固定架以及陀螺仪的移动,这样就实现了陀螺仪平面两个自由度的旋转。在空间里两个自由度能实现空间任何位置的旋转。

图2 旋转体
电源管理包含TLE8366-EV5,AMS-1117-3.3,利用开关电源设计方案可将直流7V到45V降压到5V,由于单片机供电电压为3.3V所以利用线性稳压原理,调节得到3.3V电压,同时也为陀螺仪等供电。
考虑到单片机I/O口的输出电压只有3.3V,并且I/O口能提供的电流也有很大的限制,为了保护单片机的I/O口,并且可以在驱动伺服舵机时能有一个较大的电流宽域,设计了一种经过比较器的上拉电路,使电压变为5V,同时提供可观的电流。此波形是通过利用单片机的定时功能,设定20ms的周期,改变高低电平的时间调节占空比,产生周期为20ms的方波,峰值为3.3V,通过比较器电路把峰值抬高到需要的5V。
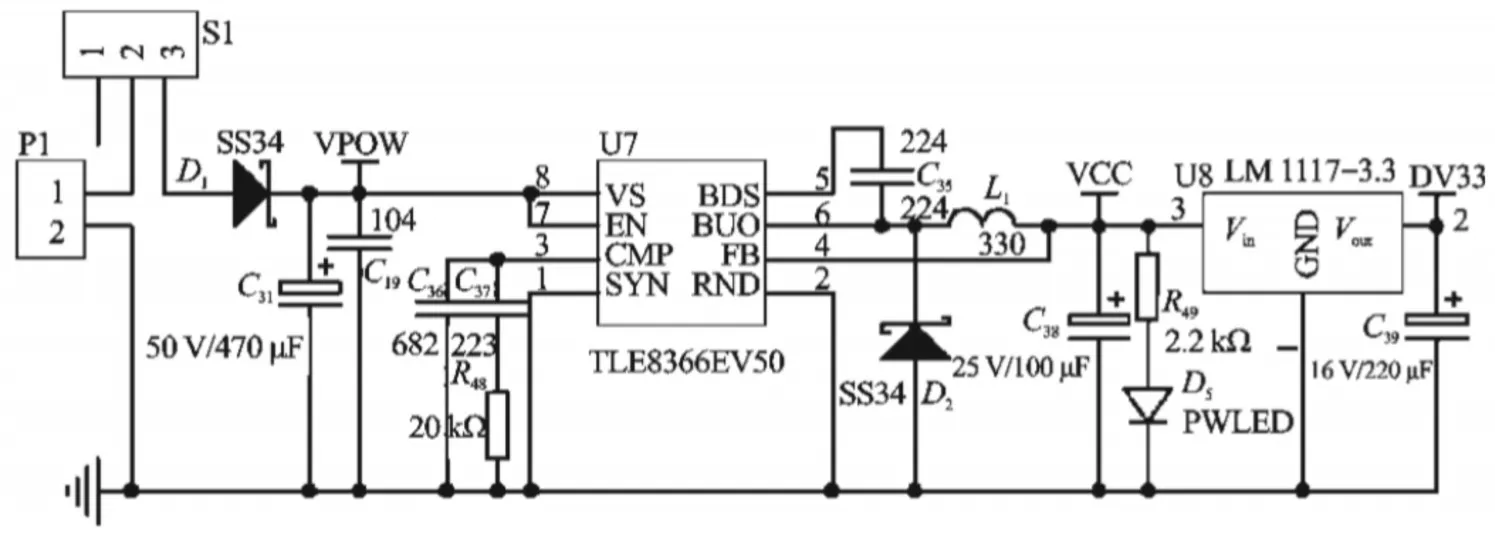
图3 电源管理
4 调平系统软件设计
程序数据反映在一个闭环的调节上,数据的处理在反复的进行,对调平的准确度起到了不可磨灭的作用。采集到的数据和理想位置进行对比,根据相应情况进行PID控制算法的计算,通过STM32产生PWM波,调节陀螺仪平面,于此同时还需要传感器的反馈,最后调节完成一个周期,如图4所示。

图4 数据流程图
本系统包含的软件程序有输出两路PWM波的I/O口控制程序、I2C总线程序、各模块的初始化程序。各软件程序功能如下:
1)I/O口控制程序:方波占空比可变,周期为20ms。
2)I2C总线程序:实现陀螺仪传感器和STM32数据传输的功能。
3)各模块的初始化程序:上电复位初始化硬件,做好准备工作。

图5 程序流程图
上电复位,进入主函数,初始化设备之后进入工作状态,首先测量重力加速度,判断加速度情况后,计算调节值。进入PID闭环循环调节,直到在误差循序的范围之内进入下一步调节(以上方法类似),结束。
5 实验测试
为了能明确地解释程序设计思路,所以结合机械结构进行说明。首先使装置计算周期公式为

其中T表示周期,V表示预分频,IV表示初始值。
伺服舵机A、伺服舵机B旋转到垂直的外置,如图6所示。
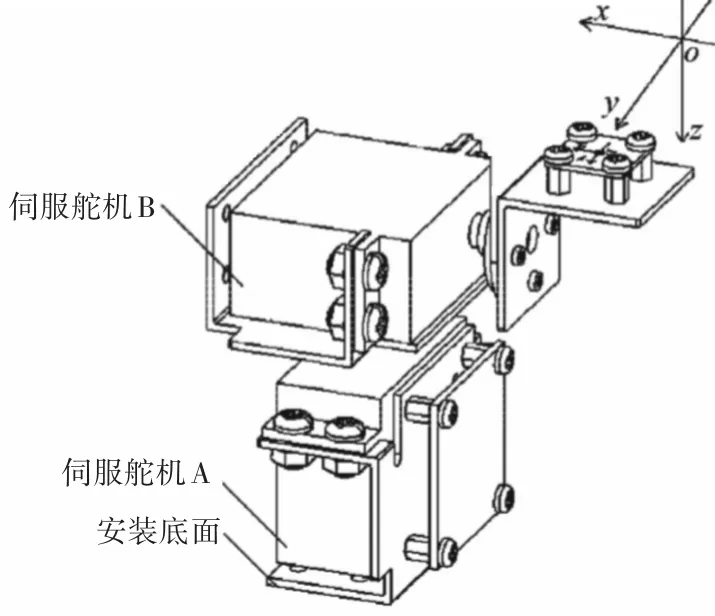
图6 系统初始状态
观察系统初始状态示意图,可看到陀螺仪在空间上的x,y,z轴,其中x,y轴所在的平面以理想状态与我们需要的平面在一个平面。z轴和伺服舵机A旋转主动轴是平行的两条线。所以假使伺服舵机A旋转那么空间上我们的坐标系会围绕z轴旋转,那么在旋转的过程中,可以使x轴或者y轴与z轴所在的平面与自然界的重力加速度在一个平面。根据几何知识,这样得到的结果是自然界的重力加速度在陀螺仪所在的空间坐标系上,在x方向或者是在y方向所在的分量接近0,当一个方向的分量接近0后,在通过旋转使另一个方向的分量同样也变为0,所以我们是实现了x,y轴所在的平面,即我们需要调平的平面与自然的重力加速度垂直,这样的旋转使得系统调平的实现。
调平程序控制:(使重力加速度在x轴方向的分量接近于0)根据系统初始状态的仰视图如图7所示。

图7 系统初始仰视图
利用三角函数知识需要转动的角度:

伺服舵机进行180°旋转占空比的域度为2.5%到12.5%所以对应于初始状态下,需要旋转α角度对应的占空比:

PID控制参数设计:PID是比例、积分、微分的缩写。在一个具有闭环的控制过程中,过程的控制方法会受到环境的影响,在参数的整定方面还需要考虑所控制对象的特点,以及干扰的来源于干扰的大小,当我们将参数整定完成后,参数就不应该被改动,可以适当的去调整设计[8]。由于微小误差的存在为了使结果更加精确,所以需要引入积分变量,累计误差进行微小的调节,误差的计算按照公式:

其中:x2为最新得到的重力加速度在x轴的分量;x1为代表上一次测得的重力加速度在x轴的分量。
PID的控制算法中还需要加入比例项,比例项Kp按照公式:

经过上述的步骤我们已经把重力加速度在x方向的分量调节到接近于0,那么接下来按照预定的思路需要调节在y方向的分量。

图8 系统一次调节后状态
如上所述:

进行PID闭环调节以后,装置在x,y方向的重力加速度分量接近0,从而我们可以看到系统已经达到了我们所希望的水平状态,这是,如果去测量z轴重力加速度的值,可以发现其值和自然重力加速度几乎相等。根据几何知识也可以了解到自然重力加速度与z轴几乎重合。
调平后,系统状态如图9所示。

图9 系统调平状态
6 结语
本文主要针对STM32微处理器控制伺服舵机调平进行了设计,通过机械电子相结合实现了高自动化的调平系统。本系统具有成本低,制作工艺简单,发展前景好的优点。本设计在时间上和精度上能满足绝大部分需求,但是在担负负载方面还有缺陷,希望以后可以改善。