运动状态下Benchmark潜艇回波特性仿真研究∗
2019-06-06潘明邓伟
潘明 邓伟
(91388部队94分队 湛江 524022)
1 引言
鱼雷是水下最具威胁力的主战武器之一,声自导鱼雷是现代鱼雷发展的趋势,它能通过声自导系统将鱼雷导向目标,其中目标强度在鱼雷捕获、追踪、识别目标整个过程中起着重要的作用,许多情况下我们把目标强度简单地认为是一固定值,这是不合理的。目标回波强度不但与入射波束开角紧密相关,而且在不同方位角上的值是不同的。实战中当鱼雷攻击目标时目标会采取相应的规避和逃逸措施,两者的位置一直在发生变化。在近距离情况下由于受到鱼雷波束扇面限制,波束照射到的目标面积也会随着变化,导致鱼雷自导系统获得的目标回波特性存在较大的差异。因此对运动状态下潜艇的回波特性进行研究具有重要的军事价值,本文用板块元方法对Benchmark潜艇运动状态下的回波特性及不同距离条件下的亮点结构分布情况进行了探讨。
2 运动状态下潜艇回波精确板块元方法
从图1鱼雷与目标运动关系出发,为了准确地进行潜艇坐标和鱼雷弹道坐标之间的转换,把坐标系原点O建立在目标模型的几何中心。首先通过仿真得到鱼雷追踪过程中各个时间点的坐标值,解算各个坐标值下鱼雷波束照射目标表面积,最后对照射表面单元进行积分求和,积分求和及板块元方法推导过程可以参考文献[2~3]。
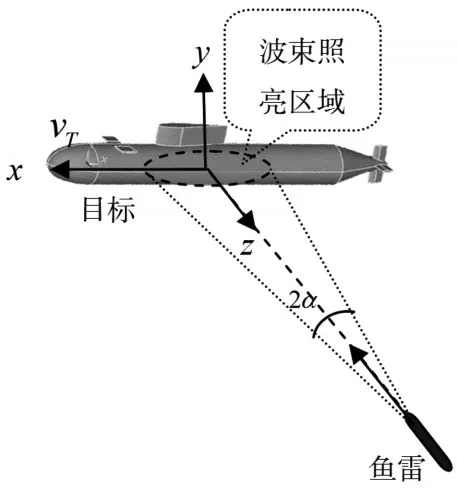
图1 鱼雷与潜艇目标运动关系
采用板块元方法计算目标回波强度的关键是对目标进行精确几何建模,建模的精度直接影响计算结果的精度,尤其是像鱼雷这种窄波束的情况。本文研究中采用三维建模软件UG建立了标准的Benchmark潜艇模型,通过Ansys软件进行了网格划分,图2是目标局部表面网格划分示意图。

图2 目标表面网格图
目标强度TS是一个远场声纳参数,鱼雷攻击目标时从远场过渡到近场,在远场中TS与回波强度ES(Echo Strength)等同,近场中TS无定义,而ES仍存在,因此用ES描述目标的近场特性。ES不仅取决于目标特性,而且还取决于目标中心的选取和接收点中心和发射点中心距离,其值可以通过近场板块元方法来计算,近场板块元方法详细推导可参考文献[3],回波强度可表示为

其中 pi是目标中心点的入射声压,ps是水听器测得的声压,r0是上述两点之间的距离。在收-发合置情况下计算回波声压的物理声学或Kirchhoff近似是

其中r是目标上一点的距离,θ是r与表面法线的夹角,入射波 pi=(A/r)exp(ikr),A是幅值,式(2)既适用于远场也适用于近场。近场时保证目标划分的网格足够小时,对于每个小面元来说还是满足远场条件,在同一板块内r可以近似为常数移出积分号外,得到:

其中Δrij是第ij号板块与参考点的距离,对所有板块元计算结果进行求和就可以得到目标总的散射声压。

这样式(4)中的积分又可以用板块元法来计算。
3 运动状态下潜艇目标强度仿真
为了简单起见,本文假定鱼雷与目标处于同一深度,鱼雷提前角ηT=0,考虑鱼雷波束开角2α=60°,目标舷角φt=0作水平直线运动,鱼雷采用尾追法追击目标作直线运动的潜艇,如图3所示。

图3 尾追法
1)建立平面坐标系xy:A(x1,y1),B(x2,y2);
2)在计算时取步长间隔为Δt,这样就可以计算每一时刻点的坐标,设在t时刻的坐标为(xi,yi),则在t+Δt时刻的坐标为

3)计算中当两者之间的距离d<设定值时计算结束;
4)对两者对应的每一点进行连线即代表鱼雷速度瞬间矢量方向。
鱼雷速度设定为50kn,潜艇目标速度设定为15kn和20kn两种情况。将需要的关键参数保存作为板块元程序输入参数,这样可以计算出不同时刻的目标回波强度。图4和图5是信号频率为20kHz的相对应的目标回波强度随距离变化的情况。

图4 Benchmark潜艇回波强度(v雷:v艇=50:15)

图5 Benchmark潜艇回波强度(v雷:v艇=50:20)
上述仿真参数除了目标航速不同之外其他参数都保持相同。通过对图4到图5仿真结果进行分析可以得出以下结论:随着鱼雷与目标速度之比(vB:vA)减小,鱼雷命中目标的航程将会增加,末段鱼雷与目标的舷角趋于零,两者成直线运动,目标回波强度趋于一常值。由于入射方位角的变化,潜艇目标回波强度起伏剧烈,总体存在变小的趋势,起伏变化规律与静止目标相比存在较大的差异。
4 运动状态下潜艇回波图谱仿真
潜艇运动过程中会出现两种情况:一是照射波束随着潜艇运动而伴随运动,不改变潜艇与发射基阵之间的相位角;二是发射基阵固定不动,照射波束方向不改变,由于潜艇运动导致潜艇与基阵相位角发生变化。
1)潜艇直线运动状态下回波仿真
对运动的潜艇回波进行预报更加接近实际,因此,对潜艇运动轨迹进行设计,假设潜艇自左向右恒速运动,潜艇运行航路设置如图6所示。对Benchmark潜艇作运动状态下潜艇回波仿真预报。其运动轨迹设计如下:在距潜艇运动轨迹790m处有一发射声源,发射信号频率30kHz,脉宽填充3个周期,信号步长2s,共获得161组目标运动传递函数。仿真得到Benchmark潜艇运动状态下回波图谱图7。

图6 潜艇运动轨迹

图7 Benchmark潜艇运动回波图谱
2)潜艇和基阵相对运动状态下潜艇回波仿真
运动轨迹设计如下:发射基阵伴随潜艇100m距离运动,伴随运动距离为L1=20m*2m*5.5m*0.5m,L2=20m*2m*5.5m*0.5m之和,图8所示潜艇运动态势图,仿真得到Benchmark潜艇运动回波图9。

图8 潜艇运动态势图

图9 Benchmark潜艇运动回波图谱
从图7仿真得到的Benchmark潜艇运动回波图谱,可以发现有三条比较明显的亮线,判断是潜艇头部、围壳、尾部反射亮点运动形成的,潜艇运动到发射基阵正横方向时亮点最强。从图9仿真得到的Benchmark潜艇运动回波图谱,可以发现当发射基阵伴随潜艇运动时,回波图像保持不变,由于潜艇的外形结构影响,不同部位的亮点图像存在较大差异。
5 结语
本文主要研究了运动状态下潜艇回波特性,建立了运动状态下潜艇精确板块元方法,对运动状态下潜艇回波图谱进行预报仿真,结果表明:潜艇处于连续运动状态时,不同时刻下回波亮点串联到一起形成了奇特的声亮线,亮线的结构和形状不仅与观察方位角有关,而且与潜艇和观察者之间的相对运动状态、观察者有效观察视角、两者之间的距离等因素密切相关,潜艇的回波亮点主要集中在三个区域:头部、围壳和尾部,正横方向时观察得到的亮点强度最强。
