基于空间矢量脉冲宽度调制的异步电机直接转矩控制系统
2019-06-05金爱娟徐峥鹏王居正田晓雯鲍思源陶伟涵
金爱娟,徐峥鹏,王居正,田晓雯,鲍思源,陶伟涵
(上海理工大学a.光电信息与计算机工程学院;b.机械工程学院,上海200093)
异步电机广泛应用于工业机器人、机床等高性能传动系统,具有高转矩、鲁棒性好、维护量小等优点。近年来,由于其体积小、质量轻、惯性小等特点,异步电机的应用越来越广泛。随着交流传动的发展趋势,异步电机已成为电机领域的重要支柱,因此认真、深入地研究其控制方法至关重要[1]。
本文采用的基于电压空间矢量脉冲宽度调制的直接转矩控制(DTC-SVPWM)技术是一种减小电磁转矩和磁链在异步电机驱动器上的波动的技术。其中,基于电压空间矢量脉冲宽度调制(SVPWM)技术具有更好的直流母线利用率、较低的转矩波动、开关损耗低、在数字系统交流电机驱动中更容易实现等优点。直接转矩控制(DTC)是矢量控制后的一种新的控制技术。它摆脱了矢量控制的解耦思想,并利用定子磁链直接控制电机的转矩。因此,系统的动态响应速度非常快。传统的DTC通常采用bang-bang控制策略来实现,但是这种控制策略不能同时满足系统的转矩和磁链的要求,从而导致磁链和转矩有较大波动,造成了脉冲电流和开关噪声的问题。由于直流电压具有利用率高,有效降低电机转矩和磁链脉动等潜在的优势,SVPWM控制策略已广泛应用于电动机速度控制领域。仿真结果同样表明,采用DTC-SVPWM技术具有快速响应的优势和良好的动态性能,同时保持了DTC的良好转矩响应。与此同时,电路的复杂性也没有增加[2]。
1 异步电机的数学模型
给异步电机定子三相绕组通入三相交流电流时会产生以同步转速旋转的圆形磁场,转子切割圆形磁场产生感应电压,感应电压在转子上形成感应电流并形成转子磁场,定子磁场与转子磁场相差ε度。根据磁场间相互作用的原理,转子磁场和定子磁场之间产生相互作用的电磁力使转子转动。在假定电机的铁芯的永久饱和被忽略、涡流和磁滞损耗被排除在外的基础上,得到异步电机磁链和转矩方程[3]。
在定子参考坐标系α,β轴下,定、转子电流一同形成的定子磁链分量表达式,如式(1)所示:

式中:Ls——定子等效两相绕组的自感;M——定子坐标系下定子与转子同轴等效绕组间的互感;iαs,iβs——定子电流α,β轴上的分量;i dr,i qr——定子坐标系下转子电流轴上的分量。
定子磁链空间向量如式(2)所示:

电磁转矩表达式如式(3)所示:

2 直接转矩控制的基本原理
DTC通过直接控制定子磁链ψs和电磁转矩Tm2个变量,进而控制三相异步电机的转速与转矩。这是一个双闭环的控制系统,首先对系统检测到的三相定子电压和电流进行三相—两相坐标变换,将变换后的电压与电流在α与β坐标系的分量代入计算模型,得到磁链计算值ψs_est、转矩计算值Tm_est和磁链位置角。此外,代入转速检测传感器的转速值到转速调节模型中,得到转矩给定值。比较给定值与计算值后,代入转矩控制器形成转矩输出指令信号,同时将磁链给定值与计算值比较,得到磁链输出指令信号,将转矩指令信号、磁链指令信号和磁链角代入开关选择单元,得到合适的电压空间矢量,输入至逆变器的门极即可输出合适的电压大小,进而控制电机[4]。DTC控制原理如图1所示,磁链调节模型与转矩调节模型分别采用两段式滞环比较器和三段式滞环比较器。控制器输出的磁链值和转矩值经双闭环调解后,会严格跟踪磁链给定值和转矩给定值。如果被控对象是速度,那么如图1所示,增加了一个速度闭环,需使用速度传感器检测速度。开关选择单元是基于两电平的三相逆变器电压空间矢量建立起来的,产生的开关矢量脉冲(SA,SB,SC)驱动三相逆变器,开关矢量脉冲共有8种状态,通过切换不同状态的开关矢量,达到控制目的[5]。

图1 DTC控制原理示意
3 基于SVPWM的直接转矩控制系统
3.1 改善传统转矩脉动的方法
传统DTC的核心思想是通过模型计算检测到的定子电压、电流矢量和转速,计算模型分别是转矩计算模型和磁链计算模型,经计算得到转矩与磁链的实际值。将实际值与给定值的误差值利用滞环控制器输出电压矢量开关状态信号控制逆变器,进而控制电机。虽然该控制算法计算量少,结构简单,滞环比较控制器响应迅速,但依旧存在低速性能不理想、电流波形形变严重、转矩脉动过大等一系列缺点。基于SVPWM的DTC系统能有效改善异步电机的静动态性能。基于SVPWM的直接转矩控制原理如图2所示。

图2 基于SVPWM的直接转矩控制原理示意
为了克服传统DTC系统中的滞环比较器的影响,使用更多的电压空间矢量对定子磁链进行连续平滑的控制,可消除系统转矩脉动和电流畸变等缺点。本文采用SVPWM方法进行直接转矩控制,其基本思想就是比较前一采样周期获得的磁链、转矩矢量值与各自给定值,根据比较值判断下一周期期望合成的电压空间矢量的大小和方向,其是由2个非零电压空间矢量和1个零电压空间矢量合成的,并且根据期望电压矢量的幅值与相角决定这3个电压空间矢量各自作用的时间,由此合成的电压空间矢量即为期望的矢量[6]。
与传统DTC方法不同的是:该系统采用的是电压脉冲宽度调制策略,将逆变器和异步电机看成一个整体,进行整体控制,控制系统具有直流电压利用率高、算法简单、谐波损耗及噪声低等特点,将先进的脉冲宽度调制策略应用到直接转矩控制系统中,大幅提高了系统的性能。
3.2 SVPWM技术
参考标准的理想三相异步电动机定子磁链圆,当输入三相对称正弦波,然后用适当的开关三相逆变器开关在不同模式下,通过形成的实际向量追踪他们的标准磁链圆形,从而形成PWM波。三相电压型逆变器结构如图3所示[7],其中直流母线电压为Udc。

图3 三相逆变器电路示意

图4 8种开关状态对应的电压空间矢量大小和位置示意
两电平三相逆变器8种开关状态对应的空间矢量大小和位置,如图4所示。间隔60°,矢量大小均为,两个零矢量位于六边形中心,大小为零。这6个扇区中,根据伏秒平衡的规则,位于任一扇区中的任意大小的空间电压矢量都是由构成这个扇区的相邻的两个非零电压矢量和零电压矢量进行线性组合而得到的,即:

式中:Uref——预期的空间电压矢量;T——采样周期;Tx,Ty,T0——有效电压空间矢量Ux,Uy和零电压空间矢量U0在一个周期内的作用时间。为了降低逆变器的开关频率以减少逆变桥的开关损耗,两个零矢量U0和U7可以按需求自由选择。
由式(4)可知,Uref在一个采样周期T时间内所累积的大小与实际效果与Ux,Uy和U0分别在时间Tx,Ty,T0内所累计的大小与效果的总和等价的。
因此,需要利用Ux,Uy和U0合成的方法得到期望的三相正弦波电压。假定空间电压矢量从
图4所示的6个非零电压矢量中,相邻两矢量U4(100)处开始逆时针旋转,要保证空间电压矢量运动轨迹近似为圆,那么每一小段时间内,都需要产生能够让电压矢量运动轨迹逼近于圆的电压矢量的增量,该电压矢量的增量可以通过相邻的2个有效电压空间矢量和1个零电压空间矢量相加得到,进行调节的空间电压矢量数量没有限制,这样也就使磁链调节较为平滑,实现电压空间矢量脉宽调制[8]。
4 异步电机直接转矩控制系统仿真
4.1 传统DTC系统仿真
三相异步电机的传统DTC算法的仿真模型主要由直流电源模块、两电平三相逆变桥模块、速度控制模块、DTC控制模块和三相异步电机模块组成。
4.1.1 磁链与转矩计算
经过坐标变换输出的电压和电流空间矢量在两相旋转坐标系下的分量作为转矩与磁链计算模型的输入,即可计算出异步电机定子实际的磁链幅值、磁链角度和转矩的大小。磁链与转矩计算模型的输入为两相坐标系的电压与电流在α,β轴上的分量iαs,iβs,Uαs,Uβs。 转矩与磁链计算模型如图5所示。
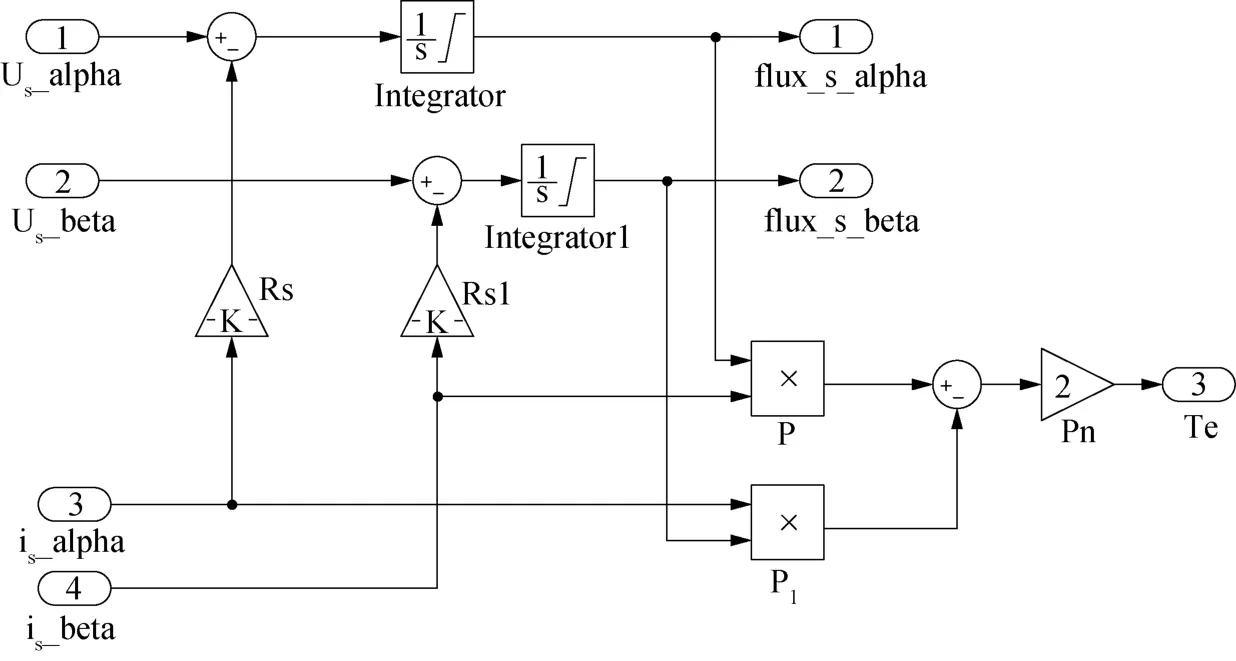
图5 转矩与磁链计算模型示意
4.1.2 磁链与转矩控制
在传统DTC算法中,磁链控制器与转矩控制器均为滞环比较器。磁链滞环比较控制器与转矩滞环比较控制器的仿真模型如图6所示,其中,磁链控制器为两位式滞环比较器,输出的指令值为2个,转矩控制器为三位式滞环比较器,输出的指令值为3个。

图6 磁链与转矩控制仿真模型示意
图6中Relay是滞环比较器,RM与M-A为将两相旋转坐标系转换为极坐标系的计算模块。转矩计算模型计算出的实际转矩值与转矩给定值求差后输入转矩滞环比较器,即可得到控制转矩的指令信号。同样的,从两相旋转坐标系向极坐标系转换模块输出的磁链空间矢量实际值与磁链空间矢量给定值求差后输入磁链滞环比较器,即可得到磁链空间矢量的指令信号。
4.1.3 电压空间矢量选择
电压空间矢量选择模块的仿真模型如图7所示。据磁链与转矩滞环比较器的输出的控制信号指令值,查找预先制作的电压空间矢量序号与输出信号指令值的表格,即可得到正确的电压空间矢量输出。
图7中,Lookup Table为磁链滞环比较控制器输出指令信号和转矩滞环比较控制器输出指令信号的组合在不同扇区与电压空间矢量序号选择规则。U0~U7代表8种电压空间矢量,即两电平三相逆变桥上下桥臂的导通状态。将以上各功能仿真模型的模块组合起来,即可得由磁链滞环比较器和转矩滞环比较器生成的三相逆变桥门极驱动信号。
4.2 基于SVPWM的DTC仿真系统
三相异步电机基于SVPWM的DTC系统仿真模型如图8所示,该控制方法仿真模型与传统DTC方法仿真模型中唯一不同的就是使用了SVPWM模块,改变了磁链与转矩控制器的滞环比较控制器。该模块中的磁链与转矩计算模型的搭建与传统DTC方法仿真模型的搭建是相同的,都是利用三相-两相坐标变换后计算出实际磁链矢量的幅值和角度以及实际转矩的大小[9]。

图7 电压空间矢量选择模块的仿真模型示意

图8 基于SVPWM的DTC系统仿真示意
4.2.1 参考电压空间矢量幅值与相角的计算
判断参考电压空间矢量的扇区位置有多种方法,本文选用通过其相位角计算的方法判断所在扇区的号码,其参考电压空间矢量相位角计算仿真模型如图9所示。
其中,输入为参考电压空间矢量在两相旋转坐标系下的电压分量值,经过直角坐标系向极坐标系转换的模块即可输出该参考电压空间矢量的幅值和角度。此外,根据SVPWM调制原理,该模块输出的m值为参考电压空间矢量幅值的调制度,其值范围为0~1。
4.2.2 开关矢量作用时间计算
开关矢量作用时间的计算由参考电压空间矢量所在的扇区号以及在两相旋转坐标系下的分量,计算出作用时间T1和T2。计算开关矢量作用时间仿真模型如图10所示。
该仿真模型包含了4个预存计算时间的表格,根据扇区号码的不同值选择不同的时间值,输出为相邻的2个有效电压空间矢量作用的时间。根据计算出的开关矢量作用时间与固定周期输出的三角波比较后输出0和1,即可得三相逆变桥开关管门极的驱动信号。

图9 参考电压空间矢量相位角计算仿真模型

图10 计算开关矢量作用时间仿真模型示意
5 仿真结果及波形比较
5.1 定子磁链轨迹
传统DTC和基于SVPWM的DTC定子磁链轨迹比较如图11所示。

图11 传统DTC和基于SVPWM的DTC定子磁链轨迹比较示意
由图11可知,传统DTC控制下的定子磁链在电机刚启动时有明显的跟踪差异,在电机稳定运行时,定子磁链的跟踪又存在波动;而在基于SVPWM的DTC控制下的定子磁链在电机刚启动时跟踪良好,平稳地按照逆时针旋转,在电机稳定时,定子磁链基本没有波动。说明该方法有效地减小了输出定子磁链的波动幅值。
5.2 空载转矩
传统DTC和基于SVPWM的DTC空载转矩比较如图12所示。

图12 传统DTC和基于SVPWM的DTC空载转矩比较示意
由图12可知,传统DTC控制下的电机空载转矩存在较大的脉动,脉动幅度大概在±1 N·m。脉动期间产生大量的尖峰转矩,会导致电机运行过程中不停地振动,影响整个控制系统平稳的工作。而基于SVPWM的DTC控制下的电机空载转矩脉动幅度明显减小,脉动幅值控制在了±0.3 N·m左右,减小幅度接近70%,极大地改善了整个控制系统的性能。
5.3 突变负载转矩响应
传统DTC和基于SVPWM的DTC突变负载转矩响应比较如图13所示。

图13 传统DTC和基于SVPWM的DTC突变负载转矩响应比较示意
由图13可知,基于SVPWM的DTC控制下的电机在负载转矩突变时,电磁转矩的响应脉动幅度更小,转矩变化更平稳。
5.4 转速减少仿真测试
当电机正在给定1 000 rad/s稳定运行时,1.5 s时突然变换速度为500 rad/s,测试电机的电磁转矩响应的波形。传统DTC和基于SVPWM的DTC转速减少仿真测试比较如图14所示。

图14 传统DTC和基于SVPWM的DTC转速减少仿真测试比较示意
由图14可知,基于SVPWM的DTC的电机在接到转速减小的指令后,电磁转矩的变化更为平稳,波动的幅度更小,具备更好的平滑调速功能。减小转速的负向转矩脉动幅度减少了将近10 N·m,有效避免了电动叉车在转速减小时抖动的幅度,提高了控制的舒适性[10]。
6 结束语
本文研究了传统的直接转矩控制三相异步电机的算法,并在该算法的研究基础上,分析了其对异步电机输出转矩脉动的影响。通过理论推导,讨论了影响电磁转矩脉动的主要因素,最终采用基于电压空间矢量脉冲宽度调制直接转矩控制算法,该算法有效避免了传统直接转矩控制算法中电压空间矢量选择单一的问题,大幅减少了转矩脉动。本文主要利用Matlab中的Simulink模块分别搭建传统DTC控制系统与基于SVPWM的DTC控制系统,并结合电动叉车实际不同的工作情况进行仿真分析,通过对比电机相电流和转矩仿真波形图,进一步验证了改进后的DTC的优越性。但是本文忽略了对两电平三相逆变器的死区效应及其补偿策略的分析,对于死区补偿策略的研究可以进一步提高电压利用率,改善整体系统的效率[11]。
