全站扫描点云支持下的铁路隧道横断面快速提取及变形分析
2019-06-05王龙飞胡海峰廉旭刚
王龙飞,胡海峰,廉旭刚
(太原理工大学矿业工程学院,山西 太原 030024)
传统的三维激光扫描测量,需要对扫描点云进行大量的拼接工作。而徕卡推出的MS50全站扫描仪为全站仪与扫描仪的结合体,具有测量定向、高精度自动拼接、直接获取对象绝对坐标等优点[1],一经推出就成为学者研究的热点。文献[2]基于MS50全站式扫描仪的测量原理对仪器精度进行了分析。文献[3—5]将MS50应用于不同的变形监测工程中,均取得了满意的结果。这些研究和应用体现了MS50的强大功能。
三维激光扫描仪应用于隧道横断面变形监测,综合来看当前的研究热点主要集中在使用隧道中轴线提取隧道横断面[6-13]。文献[6]直接使用隧道设计中轴线,但该方法具有明显的局限性。文献[7—12]则是直接对点云进行投影,通过降维的方法表示中轴线。文献[13]针对断面几何规则的地铁隧道使用圆柱面拟合的方法提取隧道中轴线。但在我国铁路应用中多为断面复杂的拱形隧道,其内部设有避车洞等附属设施,为降低其对投影后中轴线的影响有必要对其进行精细处理,这样势必会降低点云处理效率。为此针对拱形隧道,考虑其拱顶轴线理论上与中轴线平行,可以通过该轴线快速提取隧道断面。
综上所述,本文使用MS50全站扫描仪进行测边后方交会设站对采动区的一条拱形铁路隧道进行扫描,分析该方法的扫描精度,并提出基于拱形隧道拱顶轴线的方向向量实现隧道横断面快速提取的方法。使用全站扫描仪点云数据进行测试,并对被测隧道的变形情况进行分析。
1 扫描点精度分析
使用全站扫描仪进行测边后方交会快速设站对隧道扫描监测,图1为隧道监测示意图。步骤为:每次监测时,利用隧道外的2个已有控制点获得隧道内的2个棱镜布设点A、B,以A、B作为距离后方交会的已知点沿铁路进行设站,扫描得到被测隧道的点云数据。
由于三角高程观测具有较高的精度,故对任一扫描点的二维坐标精度进行分析。根据文献[14]的推论和图1可得交会点处仪器中心P的点位中误差表达式为
(1)
式中,θ表示全站仪后方交会的交会角;mA和mB表示已知点A、B的起算误差;σS1和σS2表示测边中误差。由于A、B点坐标通过隧道外一次设站测得,因此mA和mB取值可简化为
(2)
式中,σSA、σSB分别表示由隧道外向隧道内引点时设站仪器中心到A、B的测距误差。按误差传播定律可得任一扫描点的点位中误差σ为
(3)
式中,L为设站点仪器中心到扫描点的距离;α为扫描点在控制网中的方位角。将式(1)、式(2)代入式(3)可得
(4)
式(4)中的参数列表见表1,绘制得到σ与θ的关系如图2所示。
由图2可知交会角θ取值在[30°,150°]区间时,通过测边后方交会设站扫描的点位精度优于6 mm,控制后方交会角和扫描距离所得的扫描点具有较高的测量精度,可以满足采动区隧道变形监测的要求。
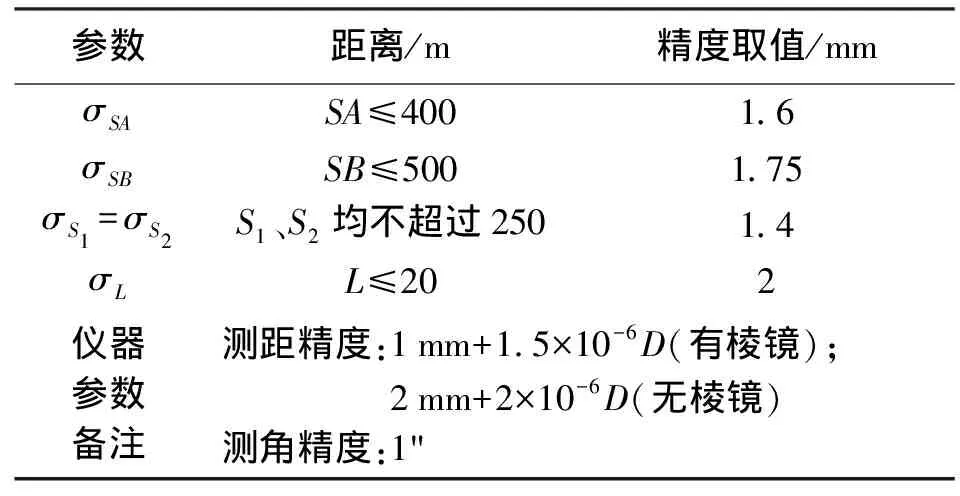
表1 隧道扫描参数
2 横断面提取方法
针对拱形隧道拱顶部位的高程差异快速提取拱顶区点集,并使用随机采样一致性算法估算拱顶区点集的方向向量,而后利用以该向量为法向的平行平面组实现隧道断面点集的快速提取。针对拱形隧道几何断面拟合困难,为提高处理效率使用后处理软件对所提取横断面点集逐一进行三角网拟合,最后提取横断面轮廓线计算横断面变形。
2.1 拱顶点集快速提取与拱顶轴线拟合
对全站扫描仪获得的原始点云数据使用PCL点云库的StatisticalOutlierRemoval滤波器消除离群点[15]。由于所获得的点云坐标为绝对坐标,隧道走向与Y轴同向但不平行,因此将点云以X、Y、Z顺序保存为ASC格式,并按Y坐标升序方式对点云数据排序。接着基于C++和PCL点云库实现隧道拱顶点集的快速提取与拟合。具体步骤如下:
(1) 求取输入隧道总点数n0,然后设计单个点云块包含点数n,计算输入点云分块数m=int(n0/n)。
(2) 获取第i个点云块中的高程最大值Himax,设定阈值Δh,则第i个点云块中任一点的高程PiH满足条件:PiH≤Himax-Δh时,认为该点为该点云块拱顶区域内一点。这样m个点云块拱顶区域点P的集合为
P=PiHPiH≤Himax-Δh}i=1,2,…,m
(3) 对获得的拱顶区点集使用抗燥效果较好的随机采样一致性算法进行参数估计得到拱顶轴线方向向量,并按此方向向量拟合拱顶轴线。
对长距离隧道来说常常有一定的弯曲,但其在短距离上仍可视为直线,此时对步骤(2)中获得的拱顶点云进行适当的“以直代曲”处理,仍可拟合得到相应的拱顶轴线。
2.2 隧道横断面点集快速提取
以上述拱顶轴线方向向量为法向,可建立一个平行平面方程组
ax+by+cz+Dj=0
(5)
式中,a、b、c为拱顶轴线方向向量要素;Dj为第j个横断面对应的平面常系数。为确定一段隧道Dj的范围,求出点云中Y坐标的最小值ymin和最大值ymax所对应的点(x0,ymin,z0)和(xn,ymax,zn),代入平面方程式得到对应的D0和Dn
(6)
在保证0 Dj=D0+(j-1)dR≤Dn (7) (8) 通过式(7)、式(8)实现对一段隧道横断面点集的快速提取(如图3所示)。 由于拱形隧道断面几何表达复杂,因此为了保证拟合精度和效率,通过后处理软件对横断面进行三维表面拟合。简单流程为:去除所提取断面点集内部的噪声;对去噪后的横断面点集按点云密度分类分别进行三维表面拟合;对随机采样一致性算法提取出的拱顶点云进行拟合得到拱顶轴线,沿此轴线提取的断面轮廓线即为横截面;选择不同时期相同位置的横截面计算隧道变形。 使用上述方法对被测隧道上的区间隧道进行横断面提取和变形分析。区间隧道长37.3 m,对应的点云点数分别为462 947和292 408。 拱顶点集提取时设置单个点云块的点云数为100、Δh=0.001,随机采样一致性算法阈值设置为0.01。图4(a)、图5(a)分别为所提取的两期隧道拱顶点集,图4(b)、图5(b)为随机采样一致性处理后点集(黑色)与拟合轴线(灰色),为清晰显示仅截取了部分长度。2期拟合轴线的方向向量分别为: 第1期:(-0.231 325,0.972 874,0.002 161) 第2期:(-0.228 010,0.973 657,0.001 716) 二者夹角约为0.195°,说明两轴线近似平行。 为保证2期隧道截取的横断面点集能够在同一位置,按第1期隧道拱顶轴线的方向向量提取横断面点集。设计提取横断面宽度w=0.5 m、间隔d=2 m,图6为提取的距离轴线起点12.5 m处断面点集提取结果。 对提取的横断面点集内部的噪声和底板进行过滤去燥,按点云密度对横断面点集分组以拟合三维表面并对拟合后的横断面做平滑处理。沿第1期区间隧道拱顶轴线截取断面轮廓线,图7为距离轴线起点12.5 m处的两期断面的拟合表面和轮廓线。灰色为拟合表面,黑色为轮廓线。 利用距离起点相同距离处的2期横断面轮廓线计算隧道变形,输出到CAD中如图8所示。从图8可以看到12.5 m处隧道横断面整体向左侧移动。而且隧道左侧变形为正,右侧变形和顶部变形为负,说明隧道左侧向背离隧道中心的方向移动,右侧向靠近隧道中线的方向移动,并且隧道顶部发生下沉。 为定量分析隧道收敛变形,按图8所示过第1期隧道截面与拱顶轴线的交点分别作竖直线1及与隧道截面相交的任一直线2。α表示直线2与直线1的夹角,规定左夹角为负,右夹角为正;变形值相对第1期背离直线1为正,指向直线1为负;上升为正,下沉为负。对12.5 m和24.5 m处的隧道横断面作图9进行分析。 由图9可知,12.5 m和24.5 m处的隧道断面两侧均出现大范围的大于20 mm的变形,而且两处断面变形总体上相似。另外在隧道底部(20°~25°)左侧变形要大于右侧,隧道中上部(大于30°)右侧变形要大于左侧,在隧道中部(35°~50°)隧道两侧出现了较稳定的变形。 结合图10所示的开采工作面与被测隧道的位置关系及该工作面有关数据:走向长960 m,倾向长192 m,平均采深约300 m,虽然在停采线进行了注浆充填减沉处理,但是由于采空区范围大且距离隧道近,隧道仍受采动的影响而向采空区中心(左侧)移动,这与图8现象相符。同时分析认为由于隧道上方的山体也受到采动影响向左侧移动,进而导致隧道左侧墙壁与山体分离;右侧墙壁受到山体挤压,导致隧道右侧应力变大,从而造成隧道左右两侧变形不一致的现象,这与图9相符。 通过使用全站扫描仪对采动区的拱形铁路隧道进行扫描,对隧道内基于距离后方交会设站获得的扫描点精度和横断面的快速提取方法进行分析和研究,得到以下结论: (1) 使用全站扫描仪进行距离后方交会设站对隧道进行扫描,控制交会角在[30°,150°]和扫描距离不大于20 m的前提下,扫描点可达到优于4 mm的精度。相比全站仪测站定向的方法快捷高效,同时由于设站点之间相对独立也减少了测站误差积累。 (2) 通过拱形隧道的拱顶轴线实现横断面点集快速提取的方法,不需要对隧道的姿态进行调整和进行大量点云投影,而且方便后期对隧道断面点集内点云噪声的处理,降低了计算量,提高了效率。并且通过所提取的横断面轮廓线计算隧道变形,计算结果能如实地反映隧道的变形趋势。不足之处在于该方法基于拱顶较空旷的铁路隧道进行了验证,对于拱顶设有大量附属设施的隧道尚需进行深入研究。
2.3 横断面轮廓线提取
3 实例应用与变形分析
3.1 拱顶点集提取与拱顶轴线拟合
3.2 断面点集提取
3.3 横断面轮廓线提取与收敛变形分析
4 结 论
