基于指数加权-核在线序列极限学习机的混沌系统动态重构研究*
2019-06-04李军后新燕
李军 后新燕
(兰州交通大学自动化与电气工程学院,兰州 730070)
1 引 言
对于许多非线性系统,尤其是混沌动力系统而言,通常在一定程度上需要建立精确、完美的数学模型,但模型的求解却十分困难,需要对混沌系统的复杂结构和隐含特征参数进行分析和研究[1].因此,在控制混沌等复杂非线性动力系统之前,进行系统辨识也是重要甚至必要的步骤之一,这可以体现在对混沌系统的动态重构[2-6]研究上,即混沌动力系统的吸引子可以通过其状态空间中的状态变量演化而得到.当未知混沌动力系统中的每个状态变量的演化过程均可获得,就可以利用全局状态变量的观测值逼近该混沌系统,这种混沌系统的全局建模和逼近方法构成一个多维输入、多维输出的复杂非线性系统辨识问题.然而,描述混沌动力系统状态演化的所有状态变量往往未知,对实际观测而言,有时仅可获得系统状态变量之一的输出,即往往得到一组含有噪声的时间序列,表示系统的某个状态变量随时间演化的过程.此时,从可获得的一组含有噪声的时间序列值中,利用Takens 的延迟-嵌入定理,则可构造出一个非线性映射,即时间序列预测模型,去逼近未知的多维非线性混沌系统.
混沌动力学系统建模目前面临着一些挑战,即克服所建立的高维非线性系统模型的“过拟合”问题,模型的稳定性、鲁棒性问题以及学习过程的复杂性等.很多已存在的复杂非线性动力系统很难用传统的严格数学模型描述,为了解决上述困难,包括神经网络[7-10]、模糊逻辑[11]、支持向量机[6,12]以及小波分析[13,14]、非线性滤波器[15,16]等算法,常常被用于混沌动力学系统的动态重构研究中,作为混沌序列预测或混沌动态重构的辨识模型表示,已取得了成功应用.
虽然混沌行为在本质上是稳定的,但是由于混沌系统展示出对初始条件及其敏感的特性,渐近行为局限在分形集、奇异吸引子上,两个或多个初始相近的轨迹也会偏离或不相关,这限制了对混沌系统进行长期预测的能力,也使得衡量辨识模型与原系统在测试条件下是否等价很困难.目前大多文献仅侧重于对混沌系统重构吸引子的“函数逼近”研究,以建模误差为指标简单比较时间序列预测模型或辨识模型的质量,缺乏对混沌动力学系统的内在动态行为的分析,即从“系统逼近”的角度评价辨识模型与混沌系统是否“动态等价”,即模型校验应涉及到计算动态不变量指标,以作为基于误差的统计校验性指标的补充.因此,混沌动态重构的研究应当从动态建模及“动态等价”方面进行,从而使得辨识模型可看作是对未知混沌动力系统的“系统逼近”,而不仅仅是“函数逼近”.如文献[14]给出了一种多分辨率的离散小波算法,应用于混沌动力学系统辨识中,从描述系统动态不变性的定性与定量指标方面的比较,验证了该算法的有效性.文献[17]给出了一种小波核偏最小二乘回归算法,成功应用于混沌系统建模中,但仅体现出辨识模型与原系统之间的“函数逼近”关系,未能从混沌系统内在的动态不变性指标方面表明辨识模型与原系统之间的“系统逼近”关系.
极限学习机(extreme learning machine,ELM)[18]是一种基于单隐层前馈神经网络(singlehidden layer feedforward neural networks,SLFNs)的快速学习算法,由于其网络结构由隐含层节点数随机确定,网络输入权值及隐含层节点参数也是随机给定.训练时采用正则化最小二乘算法仅需考虑调节网络的输出权值,从而极快地提高网络训练速度.在ELM基础上,文献[19]提出了在线序列极限学习机(online sequential extreme learning machine,OS-ELM)算法,该算法的在线顺序学习能力使得它能够及时地适应环境的动态变化,增强了模型的适应能力.由于ELM类的精度与其隐含节点的关系较为敏感,为避免该问题,核极限学习机(kernel extreme learning machine,KELM)算法仅以核函数表示未知的隐含层非线性特征映射,无需选择隐含层的节点数目,通过正则化最小二乘算法计算网络的输出权值.文献[20]将核递归最小二乘(kernel recursive least squares,KRLS)算法延伸至OS-ELM框架中,给出了一种KOS-ELM算法,并已成功应用于基准分类与回归数据集中,包括混沌时间序列预测.随着数据集的增大,核矩阵的计算也会变得较为困难,为解决该问题,一些稀疏化准则如近似线性依赖(approximate linear dependence,ALD)准则等被提出并应用于核在线学习算法中,基于固定预算技术,文献[21]还提出了一种FB-KRLS算法,在保持一定建模精度的基础上,通过限制矩阵大小,有效地解决了矩阵计算困难的问题.
鉴于文献[14]使用多分辨率小波分析算法在混沌动力学系统辨识中的成功应用,考虑到KOSELM,FB-KRLS等算法在回归与在线建模中的优势,进一步考虑到通过引入遗忘因子,削弱旧数据对算法性能的影响,以提高模型的精度[22],本文提出一种FB-EW-KOSELM算法,将其应用于混沌系统的动态重构中,预测混沌动力学系统动态行为的定性变化,并从结构稳定性方面分析辨识模型与混沌系统的“动态等价”.具体包括将FB-EWKOSELM算法用于周期驱动力作用下的Duffing-Ueda振子混沌系统动态重构中,定性与定量地分析重构吸引子与原模型的内在特性,从庞加莱映射、李雅普诺夫指数、关联维数、分岔图等多方面衡量二者之间的“动态等价”特性;将该算法应用于产生蔡氏电路双涡卷及螺旋涡卷吸引子的实测数据实例中,通过对辨识模型重构吸引子与原系统吸引子的比较分析,以验证本文算法的有效性;此外还将该算法应用于混沌电路的实测数据实例中,通过对比辨识模型重构吸引子与原系统的吸引子,以及混沌电路所产生的电压值时间序列与辨识模型重构的电压值时间序列,进一步验证该算法的有效性.
2 FB-EW-KOSELM算法
2.1 核极限学习机与在线极限学习机的算法构造
给定N组训练样本数据集其中uj是输入向量,yj是相应的标量输出.对于节点激活函数为h(u),隐含层节点数为L,具有单输出的标准单层前馈神经网络(SLFN),其网络节点的输出为

式中ϖi是连接输入层与第i个隐含层节点之间的权值向量;θ为连接输出层与第i个隐含层节点之间的权值向量,即θ=[θ1,...,θL]T;bi是第i个隐含层节点的阈值.记h(u;ϖi,bi)为hi(u),则h(u)=[h1(u),...,hL(u)]T∈RL×N为ELM的特征向量.
不同于常规的SLFN,在训练期间ELM的隐含层初始参数设置可以通过均匀分布的随机数产生,即其激活函数的参数选取通常是固定的,这使得其训练学习转换为求取最优权值向量θ的估计问题.考虑到l2范数的正则化问题求解,即有

式中H=[h(u1),...,h(uN)],η是正则化参数,输出向量y=[y1,...,yN]T∈RN×1,单位阵IN大小为N×N.
当隐含层特征映射h(u)未知时,定义核矩阵:
其中,Ωij=k(ui,uj).
由(1)式和(2)式,并考虑到
h(uj)HT=KELM的输出函数为
其中,kN(u)=[k(u,u1),...,k(u,uN)]T,α=(ηIN+Ω)¯1y.
为了完成(2)式中逆矩阵的在线计算,文献[19]提出了一种OS-ELM算法.假定数据集S由n个最小批次连续的Si组成的,即并用Hi,yi分别表示第i批最小批次数据所对应的隐含层节点矩阵及输出向量,则权值向量θ的初始化设置应为

当第i+1 批数据到来时,权值的更新为
由(6)式看出该算法等价于将递归最小二乘(recursive least squares,RLS)算法直接应用于ELM的特征向量h(u),因此与RLS算法具有同样的收敛性.
2.2 EW-KOSELM在线学习算法的设计与实现
RLS算法是线性自适应滤波算法中最常见的算法之一,这种算法以最小二乘准则为依据,其主要优点是收敛速度快,将其扩展至非线性特征空间,可形成KRLS算法,其优点是算法的收敛速度比核最小均方算法(kernel least mean square,KLMS)通常快一个数量级.将KRLS算法直接用于(4)式所示的KELM算法的在线学习中,则可形成在线核序列极限学习机(online sequential extreme learning machine with kernel,KOSELM)算法.为削弱旧数据对模型性能的影响,还可通过引入遗忘因子提高模型的预测能力,从而形成指数加权在线核序列极限学习机(exponential weighted online sequential extreme learning machine with kernel,EW-KOSELM)算法.由指数加权递归最小二乘(exponentially weighted recursive least squares,EW-RLS)算法可知,在每次迭代过程中,权值向量θt应满足目标函数J(θt)的极小值:
其中,β为遗忘因子,Bt=yt=[y1,y2,...,yt]T,Φt=[φ(u1)φ(u2)...φ(ut)] .由(7)式获得θt的最优解为
权值向量θt可以表示为输入数据的线性组合,即αt可以看作系数向量.由(8)式可知

(9)式中Qt的递推计算同样可以基于“核技巧”.参考KRLS算法的实现[23],对于序列数据(ut,yt),t=1,...,N,EW-KOSELM算法的实现步骤为:
Step 1 给定正则化参数η、核参数σ、遗忘因子β;
Step 2 初始化,令t=1,计算Q1=[ηβ+k(u1,u1)]¯1以及系数向量α1=Q1y1;
Step 3t=t+1,计算kt¯1(ut)=[k(u1,ut),k(u2,ut),...,k(ut¯1,ut)]T;
Step 4 计算zt=Qt¯1kt¯1(ut),rt=λβt+
Step 5 更新计算
Step 7 返回Step 3,直至所有数据依次完成训练.
由于EW-KOSELM算法通过序列数据的迭代训练,依次更新(9)式中的αt,但随着数据的不断增加,矩阵也会无限增长.可以通过限制数据“字典”的大小,基于ALD准则,“滑动窗口”,“固定预算”等技术,有效减少αt的运算量.假设在获取t时刻之前的训练数据后,由训练数据的子集可构成字典若φ(·)为特征映射,将输入j映射至高维特征空间F中,字典集合相应为由ALD稀疏化准则保证其元素的近似线性独立[23].“固定预算”技术则采用主动学习策略构建“字典”,仅考虑“固定内存”中所存储的M个数据,算法在每次时间更新时,并不“修剪”最旧的数据,而是旨在“修剪”最无用的数据,从而抑制核矩阵的不断增长,使用固定预算技术的一种FB-KRLS算法实现可参见文献[21].将“固定预算”应用于EW-KOSELM算法中,可形成FBEW-KOSELM算法.
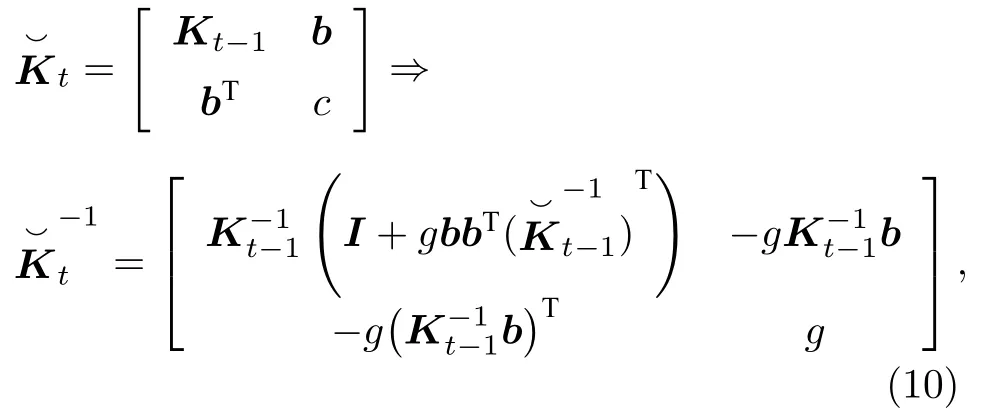
为了在再生核希尔伯特空间(RKHS)中推导FB-EW-KOSELM算法,对于序列数据(ut,yt),t=1,...,N,算法在第t次迭代时,定义Φt=[φ(u1)φ(u2)...φ(ut)],令核矩阵Ωt=ΦtTΦt及具有指数加权的正则化核矩阵若将新数据 (ut,yt)添加至内存中,即对Kt¯1增加一行及一列,可得到扩充矩阵相应地可给出逆矩阵以及
另外,当t的取值大于M时,需对存储在内存中的M个数据考虑误差丢弃准则,也就是能够对矩阵能够进行删除任意一行及一列的操作.为完成此操作,需要矩阵置换操作,定义置换矩阵Pi,Hi分别为:
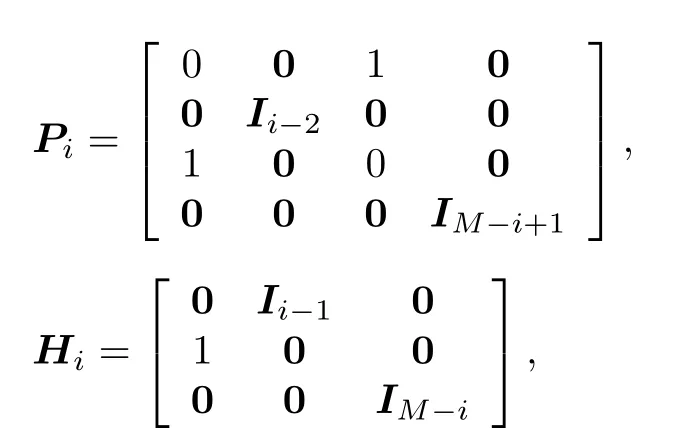
其中,Ij为维数为j的单位阵,0 为相应维度的零矩阵,且有Pi¯1=Pi,Hi¯1=HiT.

可得到


因此,FB-EW-KOSELM算法的具体实现步骤如下.
Step 1 给定固定内存大小M,正则化参数η,遗忘因子β,核参数σ;
Step 2 初始化,令t=1,计算K1=[ηβ+k(u1,u1)],
Step 3t=t+1,获取新数据 (ut,yt),由(10)式对Kt¯1进行扩充操作,以得到
Step 4 当t>M时,由误差丢弃准则[24]舍弃最无意义的数据,即
其中αi为向量αt的第i个元素,表示矩阵对角线的第i个元素;
由(13)式,计算d(ui,yi),并记录d(ui,yi)最小的数据的索引号J,从内存中削减uJ,yJ,由式(12)可获取
Step 6 重复Step 3—Step 5,直至所有训练数据依次完成.
3 混沌动力学系统的辨识实验及模型校验
本节实例中,将FB-EW-KOSELM算法应用于Duffing-Ueda振子的混沌系统动态重构及实测蔡氏电路数据的吸引子重构实验中.核函数采用如下的高斯核函数形式,即
其中σ为核参数.
3.1 Duffing-Ueda振子的数值仿真及模型校验
以Duffing-Ueda振子的非自治动力系统为例,该系统由如下微分方程描述[25]:

其中θ为阻尼系数,u(t)为系统输入.
令x1=y,x2=dy/dt,则(15)式的状态方程为

其中θ=0.1,周期输入u(t)=Fcos(Ωt),其中F=11,Ω=1 .此时为混沌动力学系统,系统周期T=2π.对(16)式用龙格-库塔算法求解,取积分间隔 dt=π/3000 .为使仿真获(取的数)据更接近实际,利用信噪比SNR=公式,其中σy为信号y(k)的标准差,σn为噪声n(k)的标准差,在最终输出中加入标准差σe=0.017,SNR约为40 dB的高斯白噪声信号[26].按采样周期Ts=π/50s对输出数据采样,产生1504个数据用于辨识实验.
为评价基于FB-EW-KOSELM算法的混沌动力学系统辨识性能,需要考虑混沌系统的动态不变性指标.对于自治非线性系统而言,需要比较原系统与辨识模型的庞加莱映射、李雅普诺夫指数、相关维等定性与定量指标即可.对于非自治的非线性系统而言,相对于庞加莱映射等其他局部不变性指标而言,混沌系统的分岔图对其结构及参数更为敏感,因此还需要考虑比较原系统与辨识模型的分岔图进行模型的定性分析校验.
所采用的NARX辨识模型结构为

其中f(·)为FB-EW-KOSELM模型,辨识模型的输出为(k),输入向量为
[y(k-1),y(k-2),y(k-3),u(k-1)]T,其中k=504到 2003,丢弃前500个数据,目的是消除系统起始瞬态的影响,即选取 1500 组数据作为训练数据集.
实验中,设置FB-EW-KOSELM算法的核参数σ=32,固定内存大小M=100,遗忘因子β=0.995,正则化参数η=10¯3.图1给出了在训练过程中算法的均方误差收敛曲线,可以看出,随着训练数据的增加,算法的收敛速度较快,可以达到满意的精度.
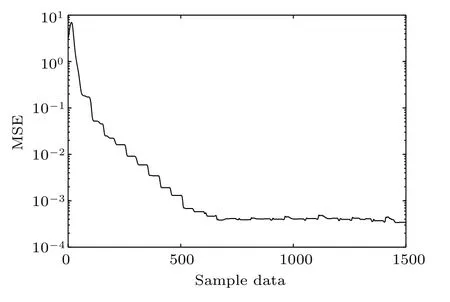
图1 算法的均方误差收敛曲线Fig.1.Convergence curve of MSE for FB-EW-KOSELM algorithm.
基于(17)式的FB-EW-KOSELM辨识模型进行训练,图2(a)给出了原模型在未加噪声情形下的吸引子轨迹图,图2(b)给出了辨识模型所对应的重构吸引子轨迹图,重构吸引子是辨识模型的输出所获取.从图2可看出,显然,在伪相平面上重构吸引子显现出的几何特征,如整体形状、位置等与无噪声的原系统吸引子非常相像,对比结果也初步表明了辨识模型的质量较好.
由于庞加莱映射能清晰地揭示混沌吸引子的分形结构,为了进一步定性分析辨识模型的混沌动力学动态性能,为实现对混沌吸引子进行更好地对比,可通过在一段固定时间内采样系统的轨迹,计算辨识模型与原系统相应的庞加莱映射.令系统轨迹为 Φ(x(t),t0),它依赖于初始条件x(t0)=x0,系统的振荡周期为T,周期性记录的轨迹位置可表示为:

由(18)式可以看出PN上的一个固定点相应于系统流形上T=2π/Ω的一个周期轨迹,类似地,PN上的k个固定点体现了k×2π/Ω个谐波周期.因此,庞加莱映射揭示出的动态特性能被用于非线性模型的校验,它能显示出关于系统局部动态变化和过渡到混沌状态的详细信息,由庞加莱映射可以很容易地识别系统的准周期与混沌区域.图3给出了原混沌系统及辨识模型的庞加莱映射对比,由图3可知,辨识模型与原系统的庞加莱映射非常相像,显示出相同的分形结构,这也进一步表明辨识模型已经抓住了原混沌系统的局部动态不变性.
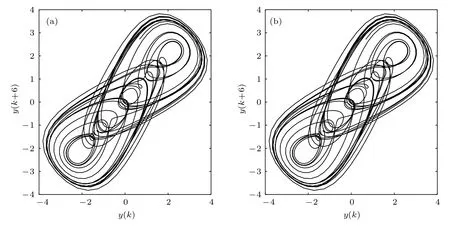
图2 Duffing吸引子(F = 11)(a)原模型;(b)辨识模型Fig.2.Duffing attractor for F = 11 plotted using:(a)The original noise-free data;(b)the model predicted output.
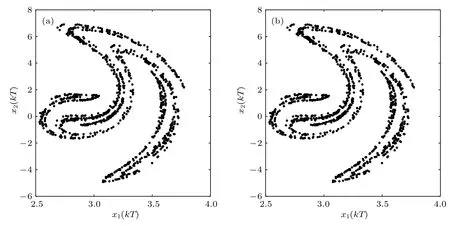
图3 庞加莱映射(F = 11)(a)原模型;(b)辨识模型Fig.3.The Poincare map(F = 11)for (a)the original system,(b)the identification model.
尽管以上实验已经表明辨识模型具有较好的重构性能,但是在许多情形下,由于扰动使得模型的动态特性会随之变化,在参数可能发生变化时,对系统结构稳定性的分析也是非常关键的.
利用FB-EW-KOSELM辨识模型应当能展现出由(15)式所描述的实际系统对于控制参数的变化,即驱动力幅值F的变化所引起的结构稳定性变化.因此,实验中取F在区间 [4.5,12] 之间变化,步长δF=0.01,进一步给出原系统与辨识模型的分岔图,通过比较判断系统的结构稳定.分岔图能被看作是一系列压缩的庞加莱映射,对于分岔图上的点r可定义为

其中I为在区间范围变化的实数集,0≤t0≤2π/Ω,Kss为常数.点r的选择以确保仿真时能消除系统的暂态影响.实际中,对于参数F的每个取值,在ti时刻将获取nb个点用以绘制分岔图,即ti的取值为

图4给出了原系统与辨识模型在Kss=400,nb=15时的分岔图比较,由图4看出,系统显现出非常丰富的动力学行为变化,F∈[4.5,4.9] 及F∈[11.6,12]时,Duffing-Ueda振子处于单周期运动状态,F∈[4.9,5.5] 时,Duffing-Ueda振子处于2倍周期运动状态,F∈[5.5,5.8] 及F∈[9.9,11.6]时,Duffing-Ueda振子则处于混沌状态.可以看出,辨识模型与原系统的分岔图非常相像,已经抓住了系统所有的主要全局不变量.对于非自治系统而言,分岔图与刻划系统局部不变量的庞加莱映射等相比,对结构和参数的变化更敏感,因此,分岔图可更好地适用于模型校验,这也进一步验证了FBEW-KOSELM辨识模型的有效性.
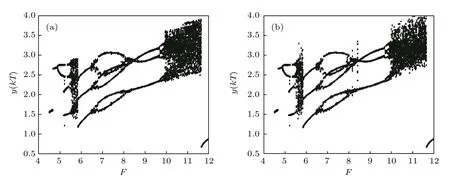
图4 Duffing-Ueda振子的分岔图 (a)原模型;(b)辨识模型Fig.4.Bifurcation diagram 4.5 ≤ F ≤ 12:(a)Original system;(b)identification model.
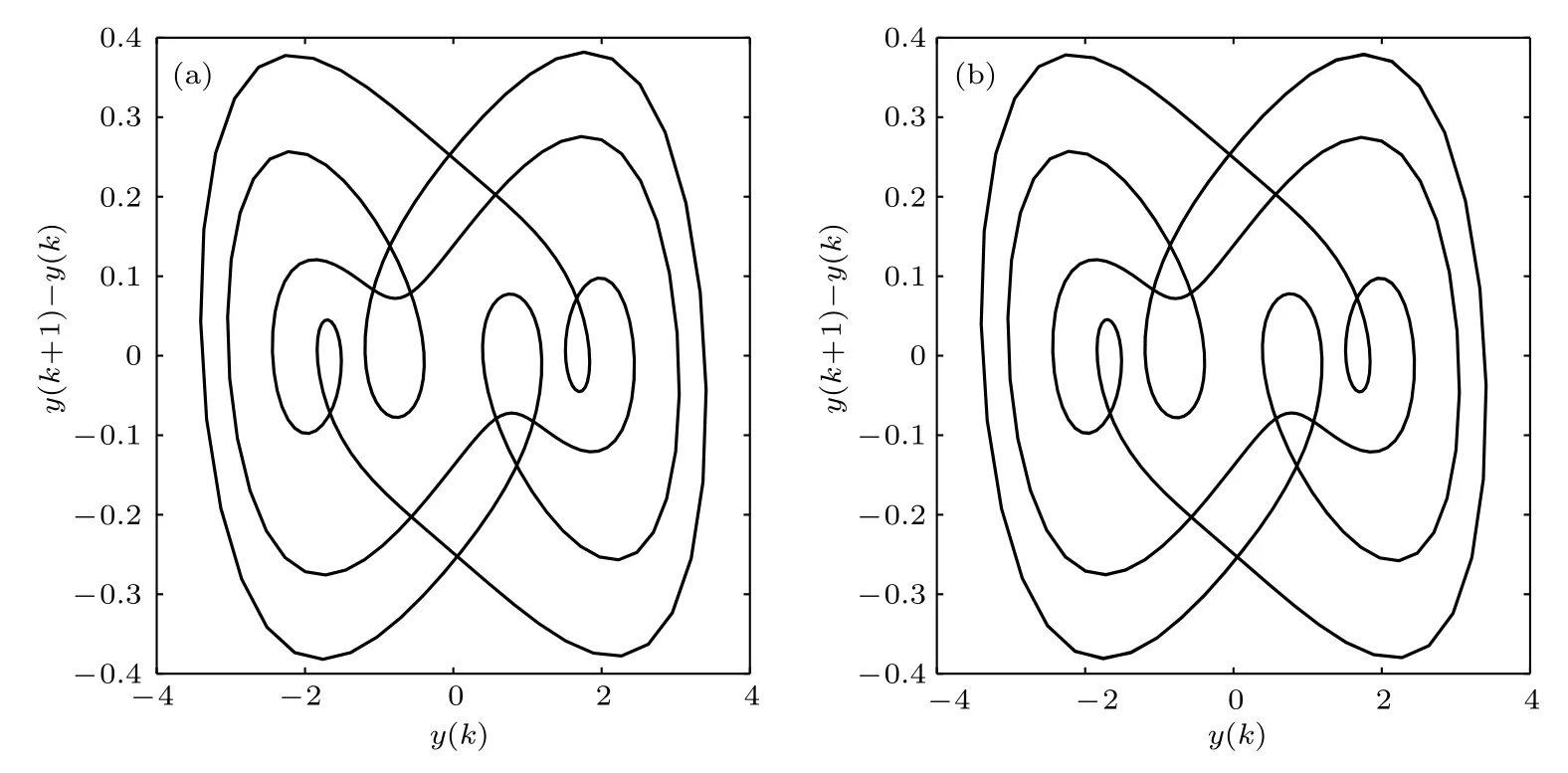
图5 F = 8.5时Duffing-Ueda振子的极限环 (a)原模型;(b)辨识模型Fig.5.Limit cycle for F = 8.5:(a)Original system;(b)identification model.
作为比较动力学系统性能的手段,分岔图的重要性还可由系统在稳定状态时的轨迹图体现.由图4看出F= 8.5时,辨识模型与原系统均处于稳定的极限环状态.因此,图5进一步给出了二者的极限环比较,可以看出辨识模型与原系统的极限环轨迹几乎匹配,与分岔图所推断出的结果一致.可见,应用分岔图分析模型的优点在于对于不同的控制参数取值,它对于研究系统的结构稳定性提供了唯一信息,以更为便捷的方式抓住极限环的几何特征.
另一方面,通过揭示系统内在特性的动态不变性指标来定量衡量逼近误差,可度量辨识模型与原系统之间的接近程度.因此,为计算辨识模型与原系统的最大正李雅普诺夫指数及关联维数等指标[25,27],在F= 11时,取用于实验的1500个实际数据及辨识模型的输出数据1500个,分别计算出原系统的最大正李雅普诺夫指数λ+=0.1757,关联维数Dc=2.0339,辨识模型的λ+=0.1754,Dc=2.0330,可见二者的动态不变性定量指标基本一致.
由实验的定性与定量分析结果表明,所提出的基于FB-EW-KOSELM的辨识模型与原系统在动态性能上是等价的.
3.2 蔡氏电路实测吸引子的动态重构实验及模型校验
考虑到蔡氏电路在混沌动态行为中的复杂性,已有较多文献[28,29]涉及该系统的非线性系统辨识研究,并取得了较好的实验结果,但数据的获取通常由系统的非线性解析模型数值仿真得到.本节则通过产生双涡卷或螺旋涡卷吸引子的蔡氏电路实测数据[30]对混沌动态行为进行辨识实验,以进一步验证FB-EW-KOSELM算法的有效性.蔡氏电路中非线性元件为双端分段线性的电阻所构成的“蔡氏二极管”,它可由文献[31]所提出的双运算放大器配置方法进行构建.蔡氏电路如图6(a)和图6(b)所示,描述其动态特性的微分方程如下:
其中vi为通过电容Ci的电压,iL为通过电感的电流,id(v1)为通过“蔡氏二极管”的电流,其大小为
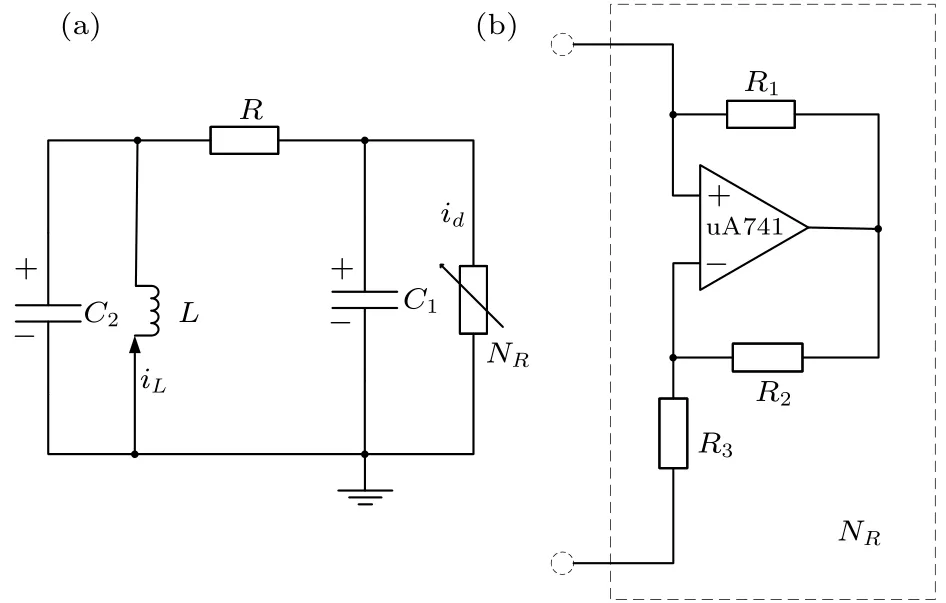
图6 (a)蔡氏电路;(b)蔡氏二极管(非线性电阻的配置)Fig.6.(a)Chua’s circuit ;(b)Chua’s diode (nonlinear resistor implementation).
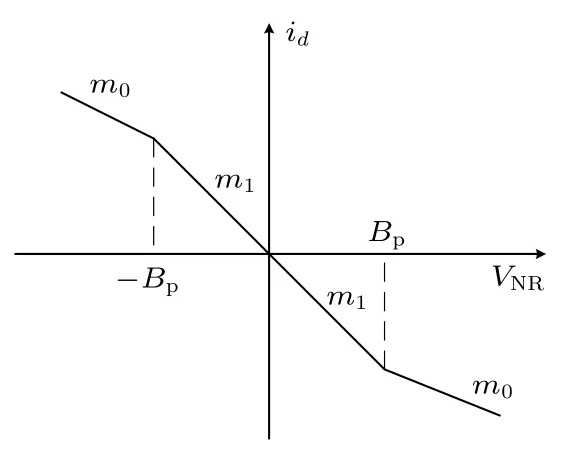
图7 蔡氏二极管的伏安特性曲线Fig.7.Volt-ampere characteristic curve of Chua’s diode.
其中Bp为分段点;m0,m1分别为各段的斜率,对应的伏安特性曲线如图7所示.
图6中的电容、电感元件取值分别为C1=(10±0.5)nF,C2=(90±5)nF,L=21± 2%mH,滑动变阻器R的最大阻值为 2kΩ,其中,蔡氏二极管的实测参数m0=(-0.37±0.04)mS,m1=(-0.37±0.04)mS,Bp=(1.1±0.2)V .取R≈1800Ω或R≈1900Ω 时,电路会产生双涡卷状吸引子或螺旋状吸引子,实测数据最终由数字示波器收集获取.因此,采样时间、分辨率及数据的总量个数受限于仪器设备的特性,采样时间的选择还基于相关函数而确定,本文实验与文献[30]一致,辨识实验分别针对这两种情形进行.
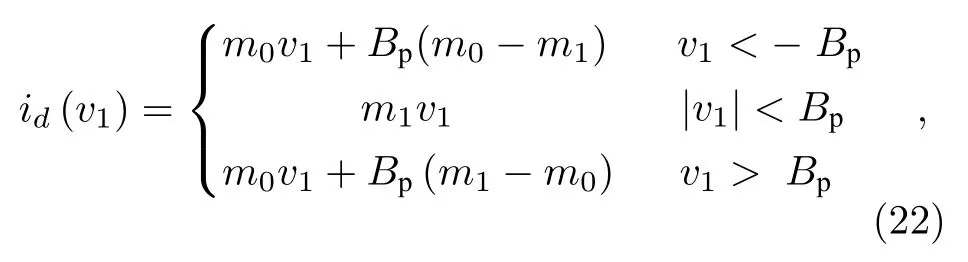
图8给出了基于实测数据,对原系统进行重构的双涡卷吸引子及螺旋吸引子图,其纵坐标的重构延迟参数与文献[30]一致,选择采样间隔为4个数据.在双涡卷状吸引子情形下,采样时间Ts= 4 μs,分辨率8 bits时,记录了电感电流iL共计15000个数据点,重构吸引子如图8(a)所示.在Ts= 12 μs,分辨率13 bits时,记录了电容电压v1共计5000个数据点,重构吸引子如图8(b)所示.在螺旋状吸引子的情形下,采样时间Ts= 4 μs 分辨率8 bits时,记录了电容电压v1共计15000个数据点,其重构吸引子如图8(c)所示.
对于图8(a)—(c)所示的原始信号,其信噪比估计值分别为47.5,72.3和49.3 dB[30].图8(a)中测量数据的低信噪比是由于测量电流信号时的霍尔效应所引起的,图8(c)中测量数据的较低信噪比则是由于低的数据采样分辨率引起.实验中,首先需进行提高实测数据信噪比的预处理,对图8(a)及图8(c)的信号采用Daubechies小波基函数进行4次分解,进行降噪处理.其次,以250 kHz的频率预处理后的数据进行采样,以获取辨识用数据,三种情形下均选择了其中的1500—2000个数据点.辨识模型结构为
图8 基于实测数据的蔡氏电路吸引子Fig.8.Measured data on the attractor of Chua’s circuit:(a)Projection of the double scroll attractor,measures of iL ;(b)measures of v1 ;(c)projection of the spiral attractor,measures of v1 .

其中非线性映射f(·)为FB-EW-KOSELM模型,y(k)信号可以为v1,v2或iL,ny为模型阶次.
采用(14)式形式的高斯核函数,辨识阶次ny=5,给定固定内存M=100,遗忘因子β=0.995,核参数σ=16 .对于图8(a)中电感电流信号,选取正则化参数η=10¯6,使用 (23)式进行辨识,输出为y(k)的估计值yˆ(k),输入向量为[y(k-1),y(k-2),...,y(k-5)]T,其中k=1000-2500,即选取1500组数据作为训练数据集.对于图8(b)中的电容电压信号,选取η=10¯3,同样使用(23)式进行辨识,其中k=3000-5000,即选取2000组数据作为训练数据集.对于图8(c)中的电容电压信号,选取η=10¯3,使用(23)式进行辨识,其中k=1000-2500,选取1500组数据作为训练数据集.
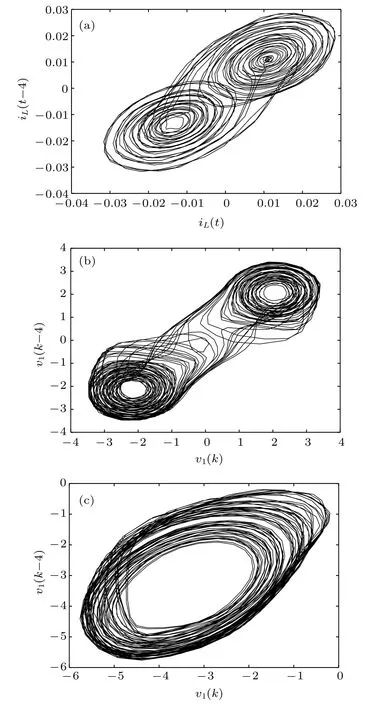
图9 基于模型预测输出的蔡氏电路重构吸引子 (a)双涡卷吸引子iL;(b)双涡卷吸引子v1;(c)螺旋吸引子v1Fig.9.Chua's attractor reconstructed from the model predicted output:(a)iLon the double scroll attractor;(b)v1on the double scroll attractor;(c)v1on the spiral attractor.
不同情形下的辨识模型的吸引子重构结果分别如图9(a)—(c)所示.比较图9与图8相对应的重构吸引子可明显看出,若实测数据的信噪比低,需进行降噪预处理,由FB-EW-KOSELM辨识模型所得到的重构吸引子能较好体现出与基于实测数据重构的原系统吸引子相吻合的几何特征,实现了混沌动态重构.
3.3 非线性硬件电路实测数据的动态重构实验及模型校验
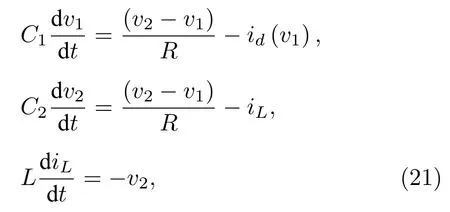
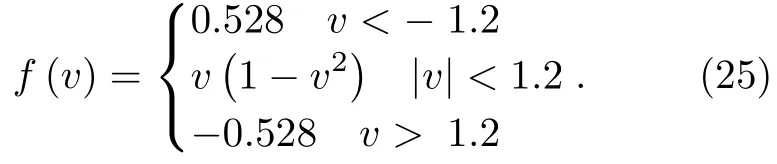
为了进一步验证FB-EW-KOSELM算法的有效性,本节物理实例的数据取自混沌状态下的电路[32]如图10所示,图10包含一个将电压输入v(t)转换为输出αf(v(t))的非线性放大器,L=145mH,r=347Ω,C=343nF,C1=225nF,R的最大值为 3.38KΩ .定义τ=C/C1,描述该电路动态特性的微分方程如下:
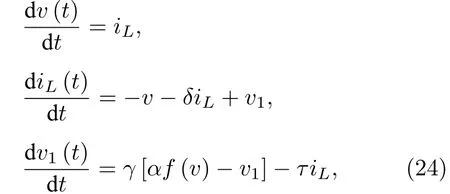
其中,v(t)为电容C两端的电压,iL(t)=i(t)为通过电感L的电流,v1(t)为电容C1两端的电压.非线性映射f(v)为
实验与文献[32]一致,取(24)式中的参数α= 15.6,γ= 0.294,τ= 1.52,δ= 0.534,采样周期Ts= 40 μs,实测时间序列数据为v的输出,共计8192个数据点.图11(a)给出了基于实测时间序列数据所重构的双涡卷吸引子,若选择辨识模型结构为
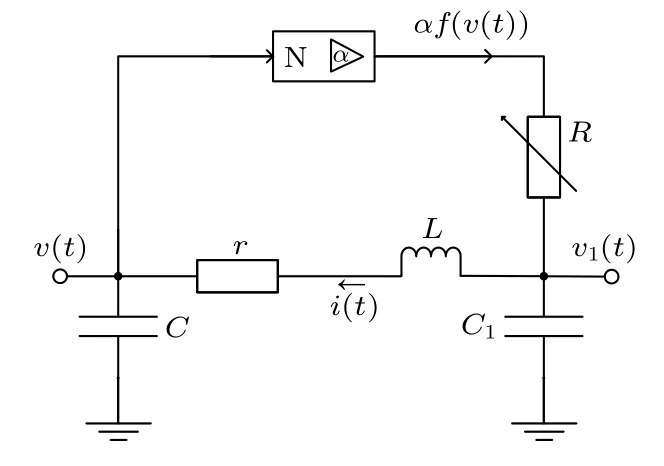
图10 混沌电路的构成Fig.10.Block diagram of the chaotic circuit.
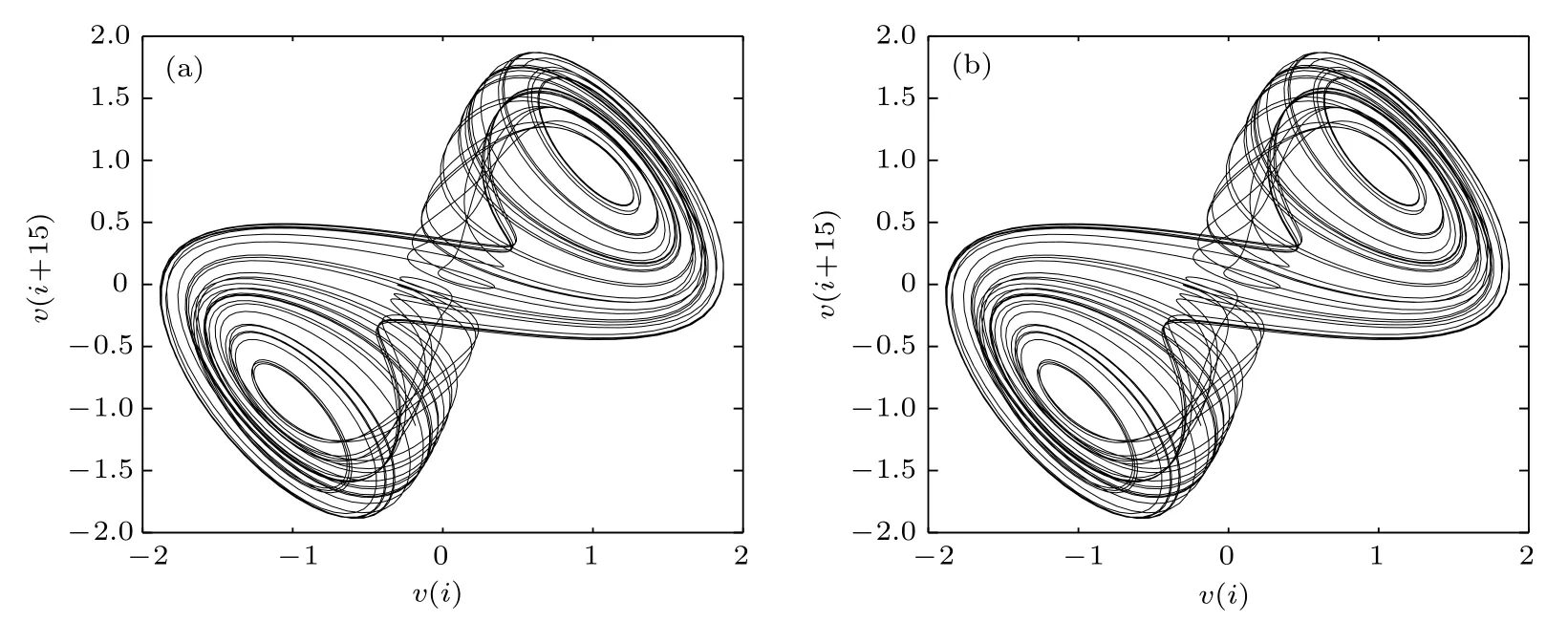
图11 重构吸引子 (a)原模型;(b)辨识模型Fig.11.Reconstructed attractor:(a)The original noise-free data;(b)the model predicted output.
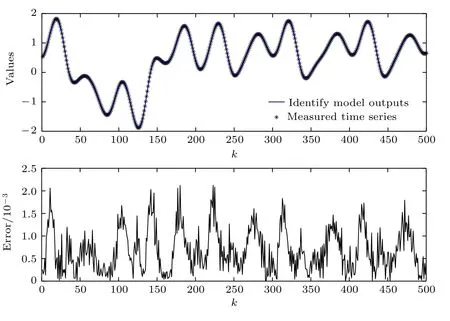
图12 (a)辨识模型输出与实测时间序列值输出结果;(b)辨识误差Fig.12.(a)Identify model outputs and measured time series values;(b)the error between the model output and the measured value.

其中f(·)为FB-EW-KOSELM模型,y(k)为电容电压v,辨识模型的输出为yˆ(k),输入向量为[y(k-1),y(k-2),...,y(k-5)]T,其中k=1000-4000,即选取3000组数据作为训练数据集.
采用(14)式形式的高斯核函数,固定内存M=100,遗忘因子β=0.995,核参数σ=32,正则化参数η=10¯6.基于辨识模型的重构吸引子如图11(b)所示,比较图11(a)与 图11(b)可明显看出,由辨识模型得到的重构吸引子能很好体现出与原系统吸引子相吻合的几何特征,实现了混沌动态重构.进一步,图12(a)给出了前500个数据点的辨识模型输出与实测时间序列值的对比,图12(b)给出了二者之间的误差,可以看出模型的辨识结果优于文献[31]的结果.
4 结 论
鉴于FB-EW-KOSELM算法的非线性建模优点,本文开展了基于FB-EW-KOSELM算法的混沌动力学系统辨识与重构研究,将其分别应用于Duffing-Ueda振子的混沌动力学系统数值仿真、产生双涡卷及螺旋涡卷吸引子的蔡氏电路实测数据及混沌电路实测数据的物理实例中,得到如下结论.
1)FB-EW-KOSELM算法通过“核技巧”将数据映射至高维特征空间,通过在线的方式对描述变量矩阵和响应变量矩阵进行建模,保留了OS-ELM的算法框架,并在此基础上进一步增加了遗忘因子.因此,FB-EW-KOSELM与常规的KELM等核学习算法相比,减小了运算量.由于遗忘因子的引入,削弱了旧数据对模型的影响,使得算法的精度进一步提高.
2)对辨识模型及原混沌系统内在的动态特性进行了定性与定量分析对比,以衡量辨识模型与原系统在动态性能上的逼近程度.在对Duffing-Ueda振子系统的数值仿真中,通过比较辨识模型与原系统的内在动态不变性指标,具体包括重构吸引子、庞加莱映射、李雅普诺夫指数、关联维数,表明所使用的辨识模型具有好的动态重构性能.另一方面,随着控制参数的变化,还能够由辨识模型的分岔图及极限环定性展现出与原系统相近的动态行为.本文的算法属于基于数据驱动的“黑箱”辨识法,因此同样适用于其他类型的混沌系统的动态重构以及具有非周期驱动力的确定性非线性系统的辨识.
3)针对蔡氏电路物理实例,需要对低信噪比的实测电感电流、电容电压数据进行小波降噪预处理,在此基础上对比分析辨识模型与原系统的吸引子,结果进一步表明了FB-EW-KOSELM辨识模型的有效性.
4)针对混沌非线性电路物理实例,与文献[32]的参数与非参数建模相比,结果进一步表明了FBEW-KOSELM辨识模型的有效性.
本文的实验结果分析表明,基于FB-EWKOSELM的动态重构算法在本质上能够抓住混沌系统的动态特性,与原系统是“系统逼近”或“动态等价”的,具有很好的应用潜力.下一步的工作将集中于研究其他核学习算法在混沌动力学系统动态重构中的应用.
感谢Aguirre L A提供的蔡氏电路电感电流、电容电压实测时间序列数据.
