基于激光雷达的道路环境障碍物检测方法∗
2019-06-01任明武
杜 芳 任明武
(南京理工大学计算机科学与工程学院 南京 210094)
1 引言
近年来,随着科技发展,人们对智能交通的关注度持续上升,关于移动机器人、自主导航车以及高级辅助驾驶系统(Advanced Driver Assistant Systems,ADAS)的研究与应用日益增多,道路环境的感知成为其研究的重要组成部分[1]。激光雷达以其较高的测距精度及角度分辨率,在道路环境感知中发挥了重要的作用。目前激光雷达在智能交通环境理解领域的研究主要集中在障碍物检测、道边检测以及可通行区域信息提取等方面[2]。
根据文献[3~4]可知,采用激光雷达检测障碍物主要根据障碍物的高度信息进行判定。本文结合多层激光雷达的特点,使用二维信息,根据雷达数据点在物体表面呈密集分布的特征,提出了一种基于数据凹凸性分布的改进多密度DBSCAN算法的快速障碍检测方法(Convexity and Multi Density-Based Spatial Clustering of Applications with Noise,CM-DBSCAN)以及一种基于帧间惯导信息匹配的动态障碍物检测方法,本文方法能够很好地提取道路环境中的障碍物信息,实现障碍物检测。
2 激光雷达
与传统摄像头相比,在环境感知应用上,激光雷达受环境光影响很小且稳定性高[5]。本文采用德国生产的IBEO-LUX-2010型号四线激光雷达,它是一种三维多层激光雷达,与单线激光雷达相比,其数据量大、检测精度高、探测范围广,可以很好地满足实际应用中的实时性以及有效性的要求[6]。
从实际应用角度出发,为保证激光雷达对前方道路观察的全面和准确,将四线激光雷达安装于汽车正前方的中间位置。如图1所示,车体坐标系以车辆的惯导中心为坐标原点,用Ov表示,激光雷达坐标系以激光雷达的中心为坐标原点,用Ol表示。雷达扫描方式决定了扫描距离ρ和扫描角度唯一确定雷达点P(x ,y,z) 的位置[7],故本文使用一种基于扫描角度划分的分层式雷达坐标转换方法。其中,Vres是其垂直扫描精度为固定值0.8°,θv表示各层雷达数据点垂直方向的扫描角度,θh表示水平方向的扫描角度,AngleTics为固定值11520,c为常量,根据雷达属性确定c值。关系式为
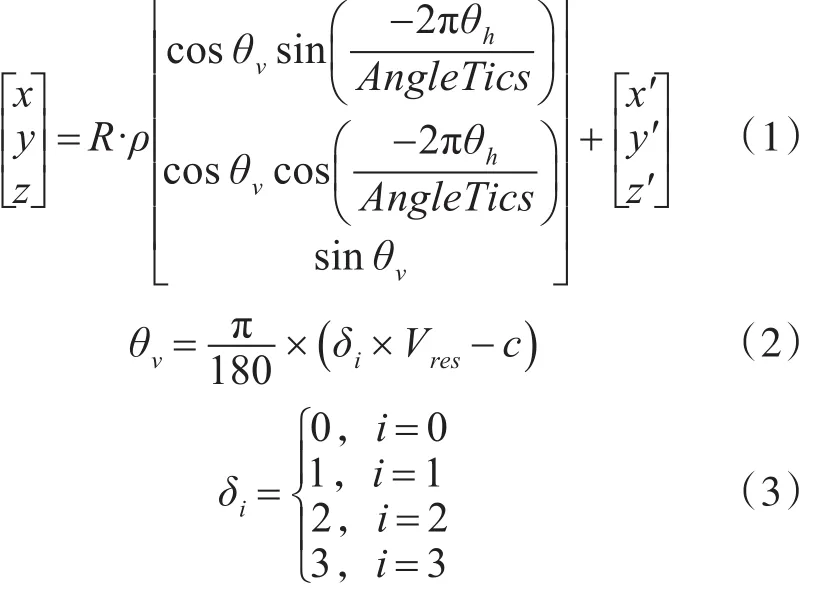
式(3)中 i=0,1,2,3分别表示对应的四层数据。由于安装固定后的雷达与车体的姿态一致,因此利用车辆的位姿传感器测量车辆姿态,由车体运动的航向角,俯仰角和翻滚角得到旋转变换矩阵R[8]。 x′、y′、z′表示从激光雷达坐标系到车体坐标系的偏移。结合式(1)、式(2),将雷达采集到的数据转换到车辆坐标系下,并进行姿态校正,可以克服道路结构及车体运动导致的数据漂移情况。由于本文中的实验只需二维信息,故将得到的三维点云数据投影至二维平面内。
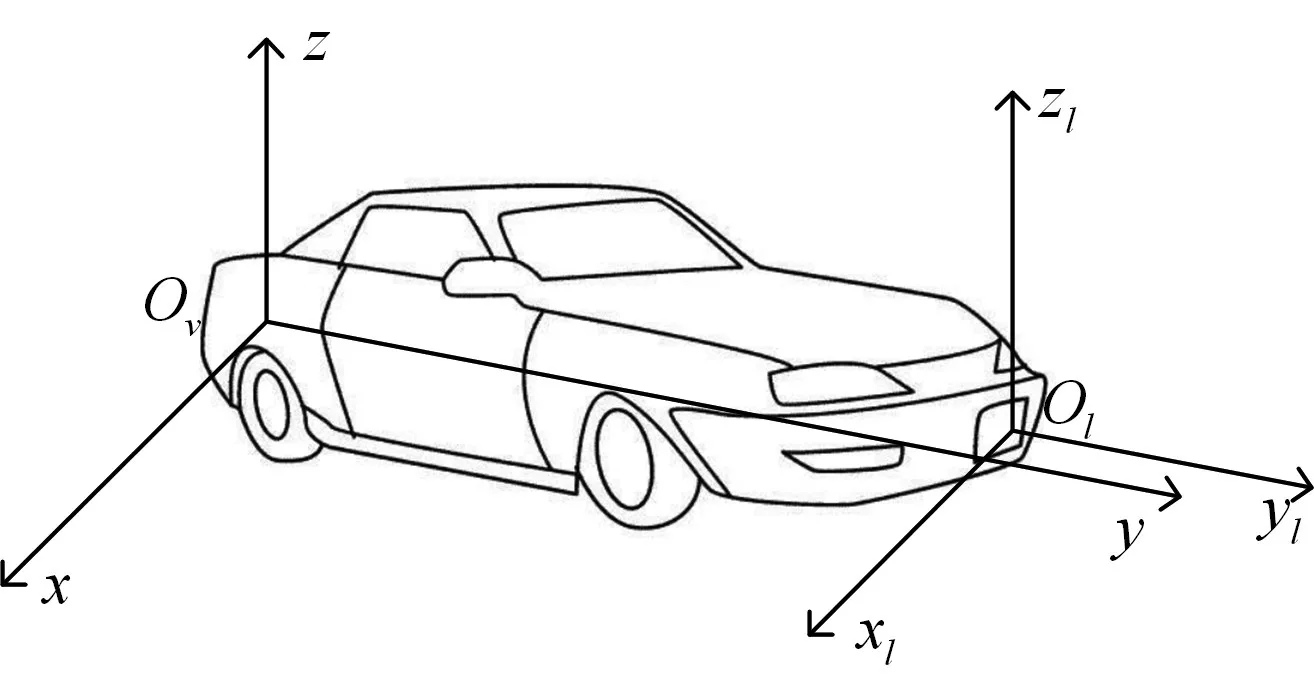
图1 坐标系关系示意图
3 基于凹凸性分布的多密度DB⁃SCAN快速障碍检测方法
3.1 基于凹凸性分布的数据预处理
本实验只考虑车前30m内的障碍物,故除去距离大于30m的雷达点。对于同一层雷达线,雷达数据扫描时的障碍返回点与其他点相比,整个数据分布呈凹凸性。根据DBSCAN原始聚类方法特点可知,缩小核心点的选取范围是降低时间复杂度、改进搜索速度的有效途径之一[9]。因此本实验根据数据分布的凹凸特性,计算同一扫描角度θh出发的第i层雷达点相对于其它三层(用 j表示)雷达点的距离表示:

本方法只需知道同一角度扫描的点距雷达的最近距离distmin,对于同一角度出发的点,只要distmin小于特定阈值则为障碍候选点。得出中所有接近distmin的对应点,认为其为初步滤取的障碍点。
3.2 基于多密度雷达数据的改进DBSCAN算法
DBSCAN是经典的基于密度的聚类算法,密度相连点的最大集合即为簇,该方法将具有足够高密度的区域划分为簇,可发现任意形状的聚类[10~11]。DBSCAN需要两个参数:扫描半径Eps和最小包含点数MinPts,这两个参数值在大多数情况下是人为给定的,其中参数Eps的值在很大程度上影响最终的聚类结果[12]。因此确定参数Eps的值是DBSCAN算法获得较好聚类结果的关键。
因此,本文基于雷达数据特性,在3.1节数据预处理的基础上针对参数敏感且无法适用于多密度数据集聚类的缺点[13],提出了一种快速的基于多密度雷达数据的动态参数DBSCAN聚类方法CM-DBSCAN。
由于该雷达为分层式对称扫描,故Eps参数确定如下:

其中Ce为聚类半径系数,θhres为水平方向的扫描角分辨率。完整的基于凹凸性分布的多密度聚类算法流程如下:
1)同一角度扫描出发的点 pi,i表示为第i层的点,判断点 pi与其它层的同一角度出发的点的最小距离,若最小距离小于阈值ε,则认为其是候选点point;
2)设定MinPts:=4,根据扫描角度和距离确定Eps的值;
3)判断输入点point是否为核心对象;
4)找出核心对象的E邻域(即Eps范围)中的所有直接密度可达点;
5)Until所有输入点都判断完毕;
6)Repeat;
7)针对所有核心对象的E邻域内所有直接密度可达点找到最大密度相连对象集合,中间涉及到一些密度可达对象的合并;
8)Until所有核心对象的E领域都遍历完毕。
4 基于惯导信息匹配的动态障碍物检测
在无人驾驶车辆行驶过程中,动态障碍物如车辆、行人带来的安全隐患非常大[14]。根据文献[15]可知,目前研究的障碍物检测方法大多都是基于单帧数据来进行处理的,无法判断障碍物的状态。文献[16~17]中,Aftatah M、陆兴华等解释了惯性导航系统(简称惯导)是一种不依赖于外部信息、以牛顿力学定律为基础的自主式导航系统,其通过测量载体在惯性参考系的加速度,将它对时间进行积分,且把它变换到导航坐标系中,就能够得到在导航坐标系中的速度、偏航角和位置等信息。因此本文根据车体运动信息,提出了一种基于惯导信息的动态障碍物检测方法。该方法在实车试验中得到了验证。根据第3章实验方法可以得出单帧数据中的障碍物检测结果,对相邻帧的检测结果进行障碍物匹配,得出匹配结果。具体的匹配方法如下:
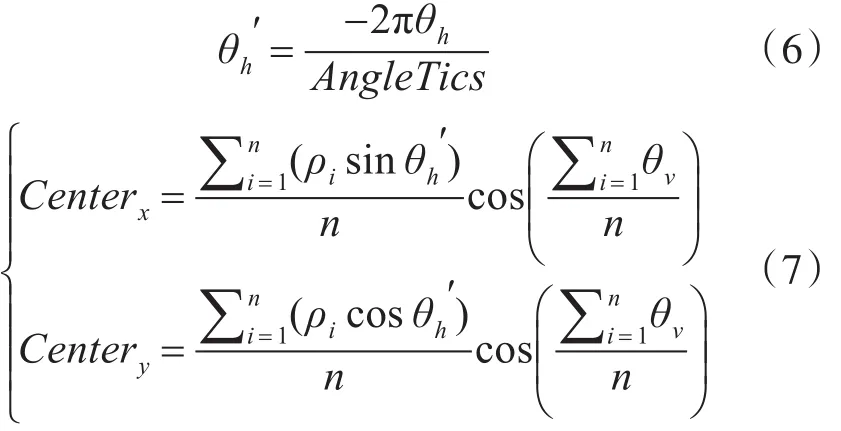
1)计算候选障碍物质心的位置:通过雷达数据点的距离平均值和角度平均值计算。
2)对检测出的障碍物结果进行标号,根据车体运动信息即车辆的位移矢量可知,若满足相邻帧的障碍物位移矢量与车体位移矢量之差η0<Δd<η1,且相邻帧的障碍物点数之差 Δn<η2、面积之差Δs<η3则为动态障碍物。
5 实验结果分析
本文中的实验平台是南京理工大学无人驾驶车平台。根据获得的实验数据,利用上文中所提出的激光雷达数据预处理方法、障碍检测方法以及动态障碍检测方法进行了实验,且不考虑道路边沿为障碍。实验结果表明在结构化道路环境中,单帧数据中的障碍物以及帧间的动态障碍物的检测结果能够很好地满足准确性和实时性要求。
5.1 实验结果
本文的实验场景如图2所示。表1为算法改进前后的实验场景中对应的连续20帧数据的搜索时间统计表。单帧雷达数据的障碍检测结果如图3、图4所示,其中图3为DBSCAN算法改进前的检测结果,图4表示改进算法后的检测结果,白色矩形表示单帧数据障碍物。图5为基于帧间数据的静态、动态障碍物检测实验结果,浅色矩形表示静态障碍物,深色矩形表示动态障碍物。

图2 实验场景
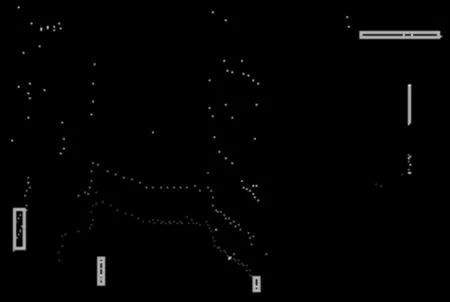
图3 改进前原始DBSCAN算法检测结果

图4 改进后CM-DBSCAN算法检测结果

表1 算法改进前后搜索时间(单位:ms)比较

图5 帧间动态障碍物检测结果
5.2 结果分析
由5.1实验结果可知,基于凹凸性分布的多密度障碍检测方法以及基于惯导信息匹配的动态障碍物检测方法得到了很好的验证。实验表明,利用数据的凹凸性分布进行数据预处理可以极大地提高后续聚类算法的搜索速度。由表1可知,改进后的CM-DBSCAN算法的搜索时间相对于改进前缩短了45.23%。障碍检测准确率方面,根据图3、图4和图5可以看出基于CM-DBSCAN算法的障碍物检测数目更加符合实际场景,且检出率更高。基于惯导信息匹配检测算法可成功检测出场景中的动态障碍物,多次实验得出单帧数据的障碍物检测成功率可达92.32%,动态障碍物检测成功率为89.79%,由此可知,CM-DBSCAN算法具有较高的检测准确率。
6 结语
本文基于四线激光雷达来检测道路环境中的障碍物,提出了一种基于数据凹凸性分布多密度DBSCAN的快速障碍检测方法(CM-DBSCAN)。该算法通过雷达数据的凹凸性分布得出障碍候选点,缩小搜索范围,从而加快了搜索速度。本文根据雷达点的密度分布,提出了一种多密度DBSCAN聚类方法,该算法能够根据数据特征自适应地调整参数Eps,解决了原始DBSCAN聚类方法的单一参数问题以及只能对单一密度区域进行聚类的问题。另外,本文还提出了一种基于惯导信息的动态障碍物检测方法。该方法根据相邻帧的障碍物检测结果,结合车体运动信息进行障碍物匹配,得出障碍检测结果。根据得到的障碍检测和道边检测的结果建立局部地图,可作为未来的研究方向之一。