无人驾驶机器人机械腿模糊监督控制*
2019-06-01王和荣
王和荣,陈 刚
(南京理工大学机械工程学院,南京 210094)
前言
从解放驾驶员双手,缓解驾驶疲劳感、提高出行安全性出发,“无人驾驶”的理念越来越为大众接受。国内外许多机构也都纷纷转向无人驾驶方面的研究,国外驾驶机器人技术仍处于保密阶段,只有德国、美国、英国以及日本等少数发达国家拥有此项技术。国内驾驶机器人的研究相对较晚,第一代驾驶机器人是由东南大学与南京汽车研究所联合研制[1-4],但近年来很多高校与研究机构参与到了无人驾驶机器人的研究中,包括南京理工大学、北京航空航天大学、太原理工大学、清华大学、上海交通大学、中国汽车技术研究中心和南京农业大学等[5-12]。
无人驾驶机器人关键技术之一是控制执行器跟踪目标位移,即使执行机构作用下的汽车跟踪目标车速。国内南京信息工程大学的袁安富提出了一种油门机械腿模糊自整定PID控制方法,但对于模型的仿真验证,只利用阶跃信号与正弦信号进行验证,并没有涉及汽车循环车速行驶工况的测试[13];太原理工大学牛喆等采用CATIA建立了驾驶机器人执行器模型并借助ADAMS对其速度、位移和加速度进行了仿真,但缺少利用执行器操纵车辆的仿真曲线[5];北京航空航天大学刘坤明等建立了机械腿的动力学模型并结合CarSim进行了车辆速度的跟踪仿真,但是在系统的控制算法上,仅仅采用普通PID控制,同时结果缺少与实验数据曲线的对比分析[14]。
由于单纯使用模糊控制器跟踪波动较大的位移信号时,系统会趋于不稳定。根据Lyapunov稳定性原理,设计了起稳定控制作用的监督控制器,使得系统的跟踪误差发散时,利用模糊控制器与监督控制器相结合的方法,使得系统趋于稳定[15-16]。本文中分析了机械腿的运动特征,建立了机械腿的动力学模型,利用模糊监督控制方法实现了对油门/制动机械腿的位置跟踪控制;并设计了油门/制动切换控制器,以车辆跟踪速度和加速度误差为输入,协调控制油门/制动机械腿的运动,仿真跟踪结果与实验数据进行比较,验证了方法的有效性。
1 驾驶机器人机械腿模型
1.1 机械腿运动学模型
驾驶机器人机械腿的三维结构如图1所示,该结构将直线电机与箱体进行固定,电机驱动时电机推杆沿直线前后运动,带动滑块沿着机械小腿杆滑动,同时小推杆绕着与箱体的铰接点作旋转运动。滑块与电机推杆之间通过推杆锁夹装置和吊耳连接,卡爪与汽车的踏板连接,在机械小腿杆的作用下沿着固定的踏板轨迹运动。

图1 机械腿三维图
利用D-H法描述机械腿的运动,如图2所示,图中x0Oy0为固定参考系,x1Oy1,x2Ay2和x3By3分别为对应各杆的运动连体参考系,h,θ1和θ2分别为电机推杆高度、OA杆转动夹角和AB杆转动夹角。汽车踏板在运动过程中轨迹是预定的,其可简化为绕固定点P的圆弧。为方便写出各坐标系之间的齐次转换关系,由图2机械腿连杆坐标系得到机械腿连杆参数,如表1所示。

图2 机械腿连杆坐标系

表1 机械腿的连杆参数


机械腿运动末端相对于固定坐标系的变换矩阵为

同时由于在运动过程中,机械腿末端B点是绕着固定的踏板轨迹——以P点为圆心的一段圆弧运动,得B点满足运动学方程:

式中Bx,By,Px,Py和 r分别为 B点、P点的横纵坐标和踏板轨迹半径。
1.2 机械腿动力学模型
利用拉格朗日方程建立动力学方程:

式中Ek和Ep分别为系统总的动能和势能。
通过对机械腿各杆件运动关系的推导,得系统总的动能与势能为
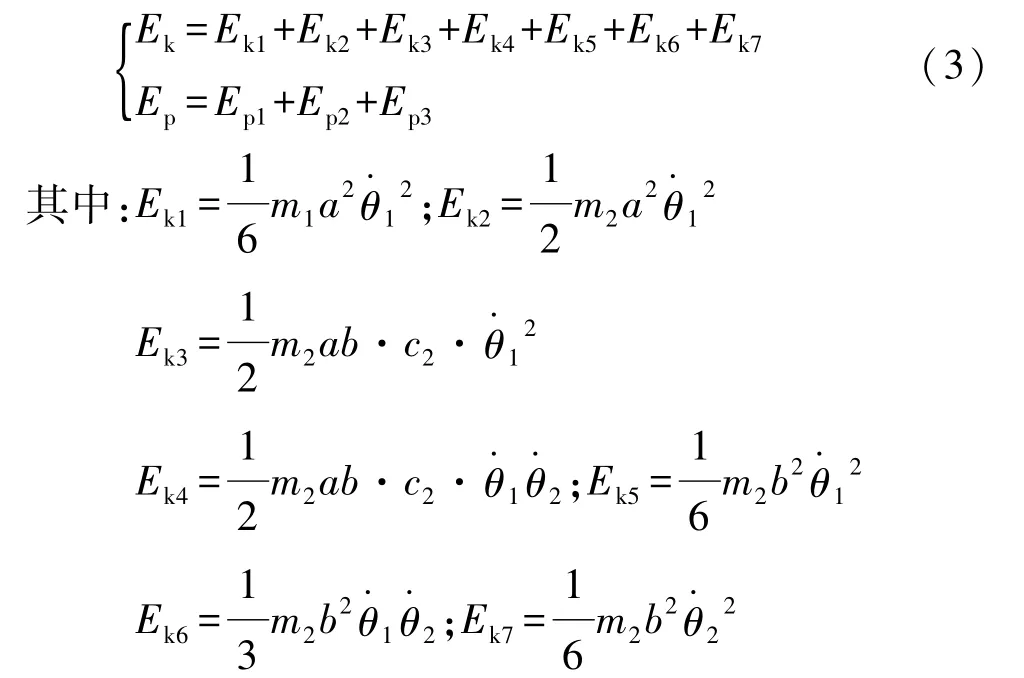

式中:m1和m2分别为OA和AB杆的质量;a和b分别为OA和AB杆的长度。
根据下式计算关节驱动力矩矢量:


2 模糊监督控制方法
模糊监督控制是由主控制器——模糊控制器,与稳定性补偿控制器——监督控制器两层控制器构成。当机械腿跟踪误差在给定误差范围内时,主控制器单独作用;当误差超出给定值时,第2层开始作用,以确保系统的稳定性。图3为在模糊监督控制下油门/制动机械腿操纵自动挡车的车速跟踪方框图,为了使得汽车跟踪目标车速,以汽车跟踪的加速度误差和速度误差作为油门/制动机械腿切换控制器的输入,以推杆直线位移量作为输出,通过坐标转换成各机械腿的转角来驱动机械腿运动。油门/制动机械腿在模糊监督控制下跟踪目标转角,并实时输出油门开度与制动力的大小。整个系统在速度闭环控制下,实现汽车对目标速度的精确跟踪。

图3 模糊监督控制作用下车速跟踪方框图
2.1 模糊控制器
模糊控制器的工作原理如图4所示,模糊控制器以位移跟踪误差及误差变化率为输入,通过对输入量的模糊处理,再经由预先设置好的模糊推理规则,实时调整PID参数值,使得作用于机械腿上的驱动控制量能够随着误差大小变化。
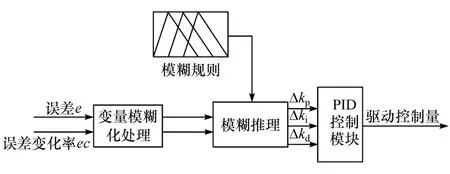
图4 模糊控制器方框图
对变量进行模糊化处理,定义误差及误差变化率的论域:

其模糊子集为

子集中元素分别代表负大、负中、负小、零、正小、正中、正大。输出变量Δkp,Δki和Δkd的论域分别为

其模糊子集为{NB,NM,NS,ZE,PS,PM,PB},为提高控制灵敏度,输入输出变量的隶属函数都采用Z型函数、三角函数与Sigmoid函数相结合的形式。跟踪误差信号经过模糊化之后,按照模糊规则实时推理出PID参数的增量,则新的控制量为

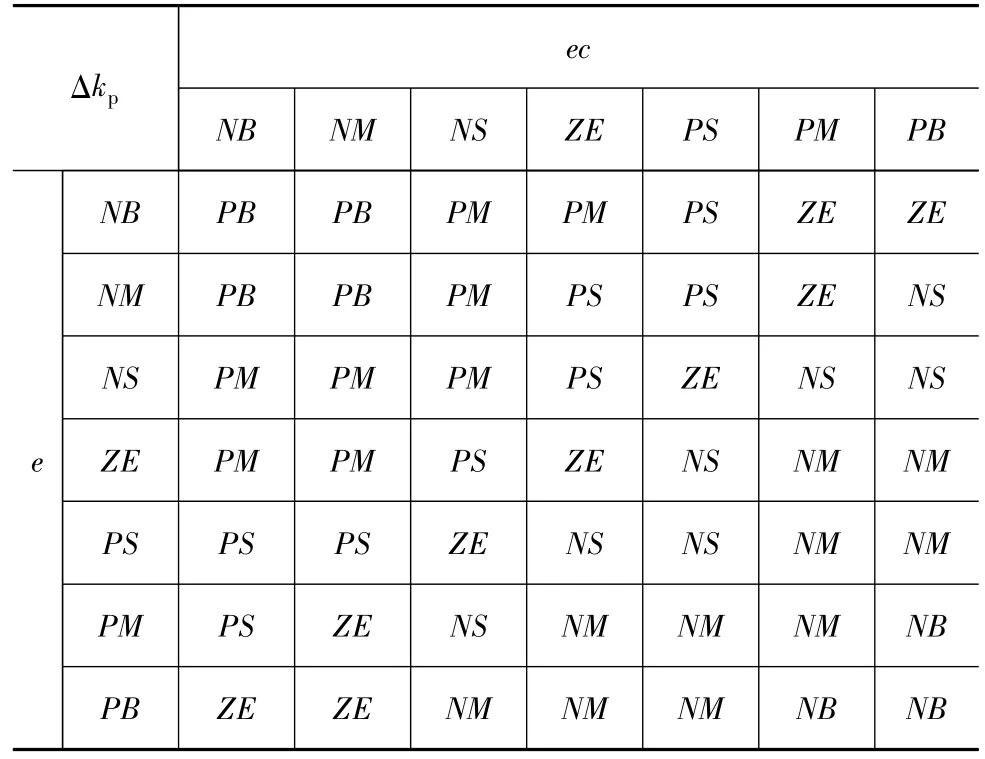
表2 Δk p的模糊规则

表3 Δk i的模糊规则
2.2 监督控制器
2.2.1 控制律设计
监督控制器是在模糊控制系统趋于不稳定时开始工作,以确保系统稳定,其设计思想是在模糊控制器 ufuzz(x)上添加一个监督控制器 us(x),us(x)只是在状态变量达到约束集{x:|x|≤Mx}的边界时才不为0,其中Mx为设计者给定的大于0的实数。
监督控制器设计为


表4 Δk d的模糊规则
模糊控制规则在专家经验的基础上进行修改建立,如表2~表4所示。本文中采用Zadeh模糊逻辑进行and操作,并采用质心法去模糊化。

由于机械腿是多输入多输出的双关节结构,为便于监督控制器的设计,式(6)可以写成:

由式(11)可见,当 si→0时,ei→0(i=1,2),则控制目标转变为使 si→0(i=1,2)。

2.2.2 稳定性分析
监督控制器的设计是使得闭环系统为全局稳定的,由Lyapunov稳定性分析理论,定义Lyapunov函数为
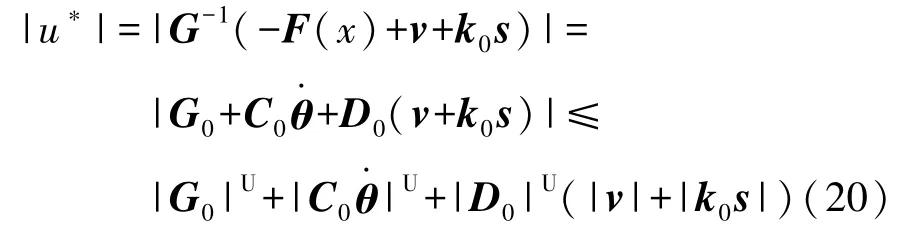
由式(20),当 V≤0时,监督控制器为


可得

由于

对式(15)求导,将式(18)带入得
解微分方程
由 Lyapunov稳定律可知,t→∞时,si(t)→0;ei及它的导数均一致收敛到0,系统稳定。
2.3 油门/制动切换控制器
车速跟踪是制动/油门踏板交替作用的效果,当一个工作时另一个输出应该为0。同时由图1机械腿的结构可知,直线电机推杆前进的距离是有限的,最远使得滑块运动到A处。同时考虑到仿真中如果直接用饱和限制模块,切换控制器输出给制动/油门机械腿的跟踪目标位移曲线将是阶跃型波动的,这与实际不相符,同时阶跃控制量也会使微分结果无穷,导致仿真失败。为限制最大运动位移且使目标位移曲线光滑变动,定义油门/制动切换控制器的输出为

式中:xmax为推杆运动的最大位移;q为PID控制器的输出,q随速度跟踪误差的增大而增大。
油门/制动切换控制器以速度误差Δv、加速度误差Δa和PID控制器的输出为输入量,其控制规则如下。
(1)当 Δv≥EU,或 0<Δv<EU&Δa>0时,驱动油门,即跟踪车速低于目标车速的量大于阈值EU,或跟踪车速低于目标车速的量介于0~EU之间,但呈继续扩大趋势时,应控制踩油门以减小跟踪误差。
(2)当 Δv≤-EU,或-EU<Δv<0&Δa<0时,驱动制动,即跟踪车速高于目标车速的量大于阈值EU,或是跟踪车速高于目标车速的量介于0~EU之间,但呈继续扩大趋势时,应控制踩制动以减小跟踪误差。
(3)当Δv和Δa处于其它情况时,不对制动和油门作任何动作。
3 仿真与试验验证
为了验证提出控制方法的有效性,对搭建的机械腿控制模型设置仿真参数,给定一正弦位移信号,模型跟踪曲线如图5所示,实线为目标转角,虚线为机械腿跟踪转角。由图可知,跟踪曲线与目标曲线的重合度较高,跟踪误差在控制允许的范围内。表5为仿真设置参数。

图5 机械腿转角跟踪曲线

表5 仿真参数设置
为进一步验证提出方法的有效性,进行了无人驾驶机器人车辆排放耐久性仿真试验,以及无人驾驶机器人车辆和人类驾驶员车辆的底盘测功机排放耐久性实车试验。仿真的控制方法分别采用提出方法和模糊PID控制方法,关键仿真参数见表5和表6。根据相关试验标准[17],经过车辆性能自学习,在BOCO NJ 150/80型底盘测功机上由无人驾驶机器人对长安悦翔自动挡轿车进行长时间的排放耐久性试验,部分试验现场图如图6所示。此外,利用人类驾驶员做同样的排放耐久性试验[18],并记录车速变化数据。

表6 油门/制动切换控制器仿真参数设置

图6 无人驾驶机器人车辆进行排放耐久性试验
图7为车速跟踪过程中机械腿制动力对比曲线,实线为试验所测制动力曲线,虚线为制动机械腿仿真模型制动力输出曲线,两条曲线基本重合验证了机械腿动力学模型的有效性。图8为车速跟踪过程中油门的开度对比曲线,实线为试验中油门开度曲线,虚线为仿真模型的油门开度曲线,由于试验采用的是普通PID控制,可以看出曲线的波动较大,同时与图7相比,可以看出制动与油门机械腿同一时刻只有一条机械腿在动作,与实际相符。

图7 制动力对比曲线

图8 油门开度
图9为车速跟踪对比曲线,虚线为输入的目标跟踪车速,点画线为在PID控制下的试验车速跟踪曲线,带标志“▲”实线为记录的人类驾驶员车速跟踪曲线,实线为无监督下的模糊自适应PID车速跟踪曲线,点虚线为提出的模糊监督控制下的车速跟踪曲线。由图可知,普通PID控制下的车速跟踪波动较大,而模糊自适应PID相比普通PID控制跟踪精度有所提高,但是在局部位置误差较大,相比之下,提出的模糊监督控制下的跟踪曲线比较平稳,虽然跟踪曲线在匀速阶段与目标车速曲线存在一定的误差,但误差保持在允许的误差±2 km/h之内。3种控制方法相比人类驾驶员,在车速跟踪控制方面都有较大的改善。

图9 车速跟踪试验与仿真对比曲线
4 结论
鉴于模糊控制器针对不同结构的控制对象,需反复进行参数调节才使系统达到闭环稳定,本文中利用Lyapunov稳定性分析原理,设计了模糊监督控制器,使得系统能够时刻检测跟踪误差,当误差超过给定值时,利用模糊监督控制器能够使误差迅速收敛,使得系统重新保持稳定。并将设计的模糊监督控制器用于油门/制动机械腿的控制,通过对比机械腿位置跟踪曲线与目标曲线的重合度,验证了控制方法的有效性。在此基础上,设计了油门/制动切换控制器,对目标车速进行跟踪控制,用本文中提出的模糊监督控制方法操纵机械腿进行车速跟踪的精度比模糊自适应PID方式跟踪的精度更高,且车速跟踪相对平滑、稳定,同时相比人类驾驶员反应速度更加灵敏,更能满足汽车耐久性试验下对不断变化的车速的跟踪需求。但本文中在建立机械腿的动力学模型上,未考虑实际模型中参数的变化以及外界扰动对建模带来的误差,这部分内容将作为接下来研究工作的一部分。
