基于非线性分离的可倾转四旋翼LQR飞行控制研究
2019-05-30卢凯文杨忠许昌亮徐浩陆可
南京信息工程大学学报 2019年4期
卢凯文 杨忠 许昌亮 徐浩 陆可
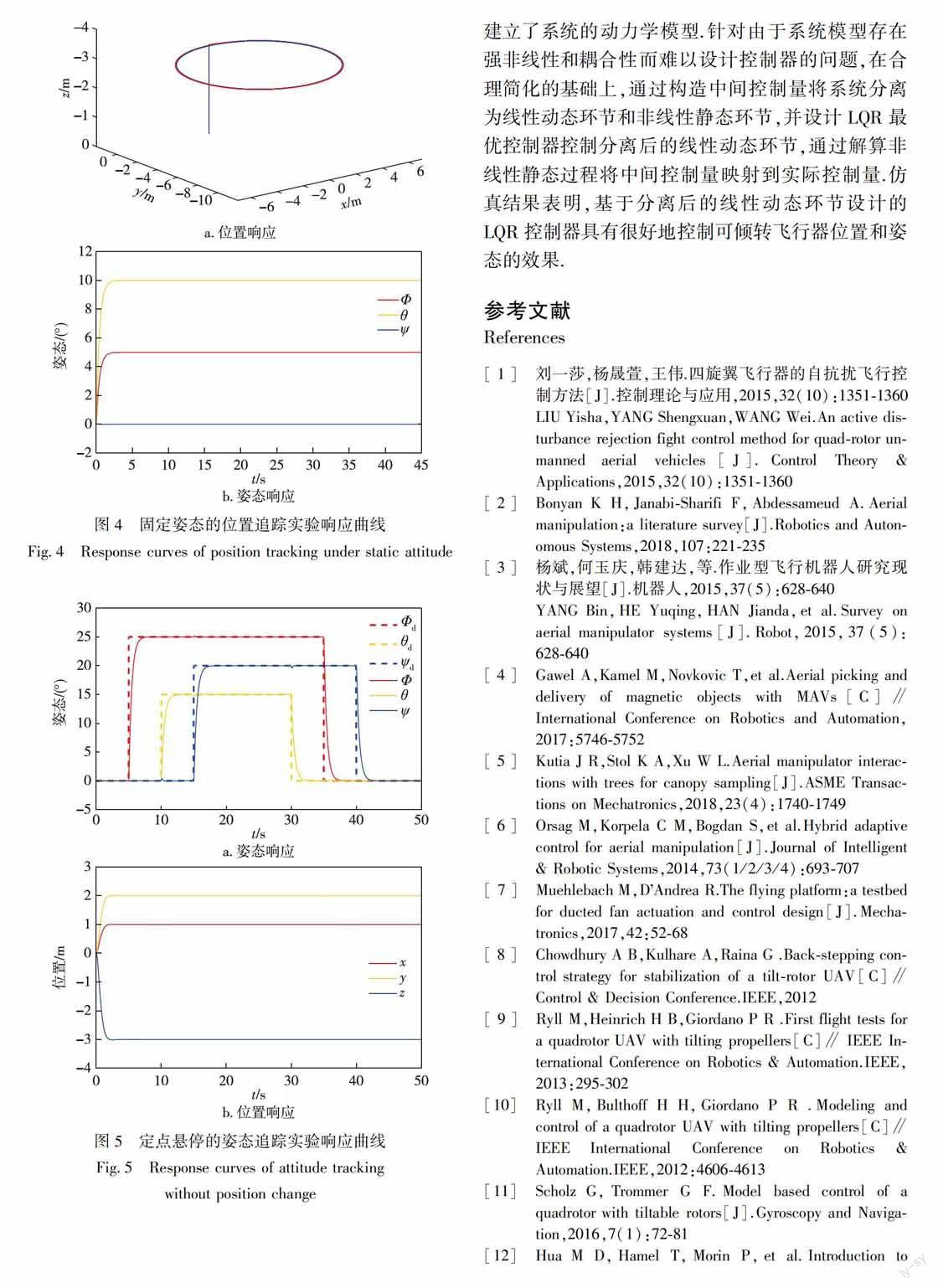
摘要:本文研究了一种能够独立控制位置和姿态的可倾转四旋翼飞行器,在建立了系统动力学模型的基础上,针对可倾转四旋翼飞行器系统存在的强输入非线性问题,采用了非线性分离策略,构造中间控制量,将该强非线性系统分离为线性动态环节和非线性静态环节,并仅针对线性动态环节设计了计算量小、易于硬件实现的线性二次型调节器(LQR),然后再通過反解输入非线性环节将中间控制量分配到实际的控制量——旋翼倾转角和电机转速.仿真实验结果表明,基于非线性分离策略设计的LQR飞行控制器能够实现对可倾转四旋翼稳定控制,很好地独立追踪位置和姿态期望.
关键词:四旋翼飞行器;可倾转旋翼;非线性分离;线性二次型调节器
