一种领队车输入未知的多车辆纵向协作控制方法
2019-05-30巩健曹进德赵园
南京信息工程大学学报 2019年4期
巩健 曹进德 赵园
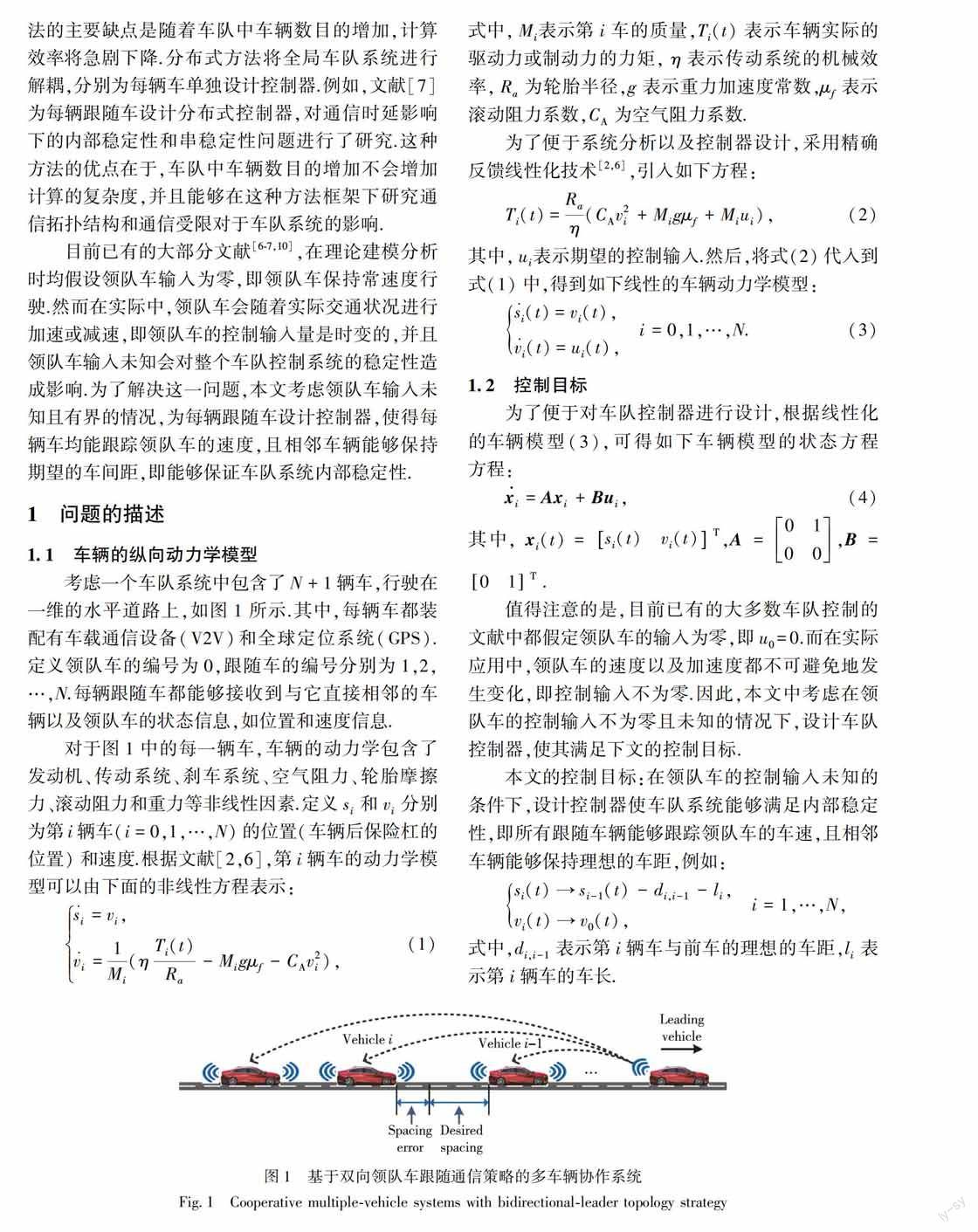

摘要:本文考虑了领队车控制输入未知的情况,提出一种多车辆纵向协作控制方法.首先,通過采用精确反馈线性化技术,得到了线性的车辆的动力学模型.然后,采用双向领队跟随通信策略,基于邻居车辆的状态信息,为每辆跟随车设计分布式控制律.考虑在领队车输入有界的情况下,提出了一种有效的多车辆协作控制算法,能够保证多车辆系统以最大的收敛速率达到内部稳定.最后,仿真结果展示了所提出控制器设计算法的有效性和优越性.
关键词:多车辆系统;协作控制;内部稳定性;分布式控制
