激光雷达技术研究现状及其应用
2019-05-30李鑫慧唐风敏
李鑫慧,郭 蓬,臧 晨,戎 辉,唐风敏
(中国汽车技术研究中心,天津 300300)
1 概述
激光雷达 (Light Detection and Ranging,LiDAR)是一种环境感知传感器,是雷达技术与激光技术的结合。由于激光本身具有单色性好、亮度高、分辨率高、灵敏度高等良好特性,这使得以激光为载波的激光雷达具有距离分辨率高、速度分辨率高、抗干扰能力强、体积小且不受无线电波干扰等环境感知优势。因此激光雷达在环境建模、物体检测识别、环境勘探测量等领域得到广泛应用。并且相比于传统微波雷达,在提供更强大感知性能前提下,体积更小质量更轻,在市场化产品的应用上优势显著。
目前市场上激光雷达产品种类众多,按激光扫描线数可分为单线激光雷达和多线激光雷达,按雷达扫描原理分为旋转式激光雷达和固态激光雷达。其中单线激光雷达主要应用于服务机器人,如常见的扫地机器人,其具有扫描速度快、可靠性高、分辨率强、成本低等优点,但由于单线激光雷达只具有单频点激光的单路发射器和单路接收器,且多采用机械旋转式扫描,在应用中有一定局限性,不适合复杂场景。而多线激光雷达具有多激光光束,且多采用非机械扫描的固态相控阵扫描方式,具有更强的环境感知能力。多线激光雷达主要应用于无人驾驶汽车,可以实现实时多物体运动轨迹跟踪,获取周围环境点云构建3D环境模型。但是目前激光雷达较高的技术壁垒和成本价格,使其市场推广和产品落地受阻。激光雷达的成本控制是其未来发展的主要趋势,未来更多供应商的加入势必会推动激光雷达解决方案的落地,以及成本的降低[1]。
2 国内外关于激光雷达的研究现状
2.1 国外激光雷达研究现状
自1960年美国科学家梅曼研制出第一台红宝石激光器起,用于环境感知的激光雷达开始被大量研究。相关研究最先是从激光测距仪开始,在1961年第一台军用测距仪通过美军方检验,进入实际应用中,在1971年美国军队装备AN/GVS3测距仪用于军事侦察。而后激光环境勘测从单点测量,发展到二维扫描。从90年代开始,可以计算出地形图像的机载激光雷达开始被应用在地形勘测中,如1995年美国TopScan公司开发的机载地形测量激光雷达,2003德国Leica公司研制的ALS50系列地理勘测激光雷达。
近年来,随着激光雷达的技术发展和智能交通的发展需要,能进行三维立体扫描的车载激光雷达设备逐渐落地,产品商业化的公司有美国Velodyne公司、法国的TopoSys公司、德国IBEO公司和Sick公司等。其中美国Velodyne公司产品的性能和精度处于国际领先地位,几乎成为自动驾驶行业激光雷达选型的黄金标准,其16线、32线、64线的产品被广泛应用在自动驾驶车辆上。不论是国际高校间的自动驾驶比赛,还是诸如谷歌百度等参与自动驾驶研究的企业,其研发出的自动驾驶车辆都能看到Velodyne激光雷达的身影。
2.2 国内激光雷达发展现状
相对于国际研究水平,我国对激光雷达技术的研究起步较晚,在80年代航天科工研制的激光测距机实现200 m内0.5 m误差的远程测距。另一方面受军用激光协会大力支持,国内研制出红宝石激光人造卫星测距机、用于复杂地形测绘的飞机机载激光航测仪。在2007年以前国内高校及研究院所在激光技术层面有不错积累,但是在激光产品商业化产品化上基本没有,主要激光应用场景基本依赖国外进口产品。2007年以后,国内激光雷达产品才开始逐渐被应用到军事、民用以及工业领域。
随着国内无人驾驶行业和国际浪潮一起井喷发展,国内也涌现出几家激光雷达厂商。其中以速腾聚创、北科天绘、镭神智能、思岚科技、禾赛科技等创业公司为代表的国产激光雷达产品逐渐获得市场认可,并在智能汽车中使用。但相比国际领先产品,如Velodyne,国产激光雷达在精度、稳定性上还有差距,主要以价格优势抢占市场。国产激光雷达厂商在原理技术和生产工艺上仍需跟上国际步伐。
3 激光雷达的技术原理及测试
3.1 激光雷达的技术原理
激光雷达是一种通过测量发射脉冲激光光束与传感器接收的反射脉冲光束实现非接触式距离测量和多维度扫描的仪器。激光雷达通过对接收模块捕获的反射光束进行信号处理,比如消噪声重构,最后结合强度像和距离像的融合,经现实设备输出待测目标的三维图像[2]。经过激光雷达处理器解算可得到被观测物的立体稠密点云坐标数据,而这些高精度多维数据经过特定算法可解算出被观测物距离、方向、速度、姿态等重要参数。
目前主流的激光雷达产品主要采用的探测技术方案集中在三角测距激光雷达和TOF(Time of Flight)激光雷达两种。
3.1.1 三角测距激光雷达
基于三角测量法激光雷达由激光发射器和接收器两部分组成,其中接收器一般采用线性CCD或线性CMOS,接收器可看作小孔成像模型。发射器发出激光,当光束到达物体表面后发生反射,反射光束再被接收器捕获。发射器与接收器之间存在一定间隔,称之为基线长度。基线长度的存在使得当物体与激光雷达的距离改变时,接收器内部CCD接收到激光光束的位置点也随之改变。该类型的激光雷达可以根据三角公式,计算出观测物的距离。
三角测距激光雷达的原理图如图1所示,该方案的测量精度受被观测物距离远近的影响较大。一旦物体距离较远,其反射光点会聚集于o附近,极大地损失距离分辨率。
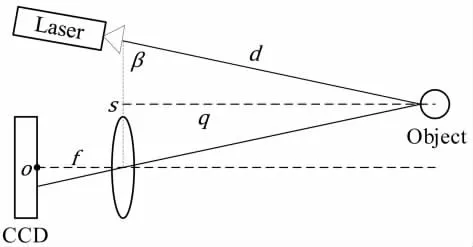
图1 三角测距激光雷达原理图
根据原理图可知基线长s,与发射器Laser光轴夹角为β,观测物Object与基线距离q。接收器满足小孔成像模型,镜头与CCD芯片的焦距为f。线性CCD中点为o,反射光轴在CCD上投射点与o距离为x。则有:

式中:f——焦距;q——观测物与基线距离;o——CCD中点;s——基线长;x——接收点与o距离;β——发射器与光轴夹角。
3.1.2 TOF (Time of Flight) 激光雷达
TOF是一种利用光飞行时间的光学测距方式,大量应用于激光雷达、深度摄像头等三维深度感知传感器上。TOF激光雷达主要由发射器、接收器、高精度计时器组成。激光发射器发射出已调制的激光光束,光束到达观测物表面并反射回接收器。TOF激光雷达的原理图如图2所示,TOF激光雷达虽然体积小、抗干扰性强,但是其测量分辨率受计时器计时精度限制,且功耗较大。
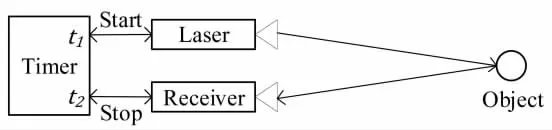
图2 TOF激光雷达原理图
TOF激光雷达内部计时器记录下激光发射时刻t1和接收时刻t2,如图2所示,时间差即被称为光飞行时间。由于光速c已知,即可通过以下公式计算出观测物距离d:
式中:t1——发射时刻;t2——接收时刻;c——光速;d——观测物距离。
3.2 激光雷达的测试技术
激光雷达在自动驾驶领域的快速发展快速应用,然而目前市场尚未存在针对激光雷达测试的统一标准。各大厂商在发布自家车载激光雷达产品的同时,均给出自家产品相关的测试数据文档。结合各大厂家测试报告的内容,激光雷达测试项目可划分为室外场景和室内场景两大主要方面。
对于室外场景,测试项目主要包括:激光雷达测距能力、各通道测距一致性、行人检测能力、车辆检测能力、电线杆检测能力、障碍锥检测能力。通过激光雷达在不同测试环境、不同距离下记录点云效果,进行各项能力的对比和评估。
对于室内场景,测试项目主要包括:无效点对比测试、墙面厚度对比测试、边缘效应对比测试等。无效点对比测试是将激光雷达放置于被测环境中,测试无效点所占百分比。墙面厚度对比测试是将激光雷达垂直于墙面并保持水平,统计激光雷达距墙面不同时墙面的点云分布,主要用于测试激光雷达的测量精度。边缘效应对比测试是将标定板部分靠在墙体上,观察未靠在墙壁部分的边缘的杂点数。
4 激光雷达的应用
伴随着软硬件的研发生产水平提升,激光雷达在不同领域有很多成功的应用,其主要被应用于:大气环境监测、城市三维制图、智能汽车及智慧交通等场景。
4.1 大气环境监测中的应用
由于激光具有探测波长短、波束定向性强和能量密度高的特性,激光雷达最初便被广泛应用于测量大气参数,如云的高度和密度、云粒子特性、微量气体浓度、温湿度、气压、风场等[3]。气象激光雷达包括:弹性反向散射激光雷达、差分吸收激光雷达、拉曼激光雷达、多普勒激光雷达。
其应用形式分为地基 (Ground-based)和机载 (Airborne)两种。激光雷达在地面时,首先可利用大气的反向散射可直接测量云粒子和气溶胶的分布情况,其次在特殊的波长和偏振下还可测得风场或卷云冰晶的状态,另外通过测量反向散射光的频率可测得光束方向上的温度和风速。而机载激光雷达通常采用差分吸收法,将波长调制到待测气体成分的激光吸收线,利用两个或多个间隔相近的波长来分解地面的表面反射率以及其他传输损耗,测量出地面对不同激光波长的表面反射率,从而确定对应的气体成分在大气中的混合比,常用于测量二氧化碳、甲烷、臭氧等气体。
4.2 城市三维建模中的应用
在城市化和工业化进程中,具有城市三维模型的数字化城市规划系统能助力于优化城市建设、社会建设,这使得城市规划管理部门迫切需要高精度遥感地理信息系统来促进城市地区的可持续发展。在城市遥感解决方案中,激光雷达是目前用于构建城市三维模型的技术中最准确、快速的测绘技术。
典型的激光雷达由飞机、无人机操作,利用激光雷达获取的城市建筑点云,融合机载GPS或惯性测量单元(IMU)等信息,快速构建数字城市三维模型[4]。建模的过程包括对点云的滤波预处理、点云分割和特征提取、匹配点的配准等,而这些目前在城市建模已有较为成熟的方案。
4.3 智能汽车及智慧交通领域中的应用
激光雷达在智能汽车的辅助驾驶和安全保障上有大量应用,包括自动泊车系统、自动巡航系统、紧急制动辅助系统、无人驾驶系统等。在自动泊车系统中,激光雷达被安装于车顶或车身四周,用于检测停车位位置、感知周围车辆等障碍物,为车辆控制决策系统提供环境输入[5]。在无人驾驶系统中,需要融合多种传感器的数据来实现环境感知,而激光雷达在其中提供着重要且详细的环境信息,用于自动驾驶车辆的高精三维地图构建。
在智慧交通领域,激光雷达被应用在交通监控、交通执法、自动电子收费等系统中。在交通监控中,通过激光雷达能获取到比视频监控更为精确的车流点云数据,在对海量车流数据分析的基础上智能化控制交通信号,调度车流。
5 结语
激光雷达近几年发展迅速,相比国际产品性能,国产激光雷达技术仍需持续攻坚投入。激光雷达在各领域均存在专用激光雷达设备的广泛应用,但行业仍需一套统一化规范化测试标准。激光雷达在自动驾驶领域受到了极大的关注,不仅提高了汽车的辅助性安全性,更为今后无人驾驶的实现提供可能。未来在各方企业和科研单位的推动下,激光雷达技术将会得到进一步发展,同时将会应用到更多不同的场景和领域。
