反超低空突防的全程弹道设计优化研究*
2019-05-28马新鹏李旭昌吴达
马新鹏,李旭昌,吴达,陈 峰
(空军工程大学防空反导学院,西安 710051)
0 引言
防空导弹在拦截超低空目标时,由于受到地形或者地海杂波的影响,会受到镜面反射信号的影响,从而形成多路径效应问题[1-2],导致雷达导引头无法有效地跟踪识别目标,严重影响导弹的作战性能。随着超低空飞行技术的快速发展,研究具有反超低空突防能力的防空导弹就显得尤为重要。
导弹和镜像目标的连线与水平面的夹角称为擦地角[3]。研究指出:当擦地角达到某个角度时,地海杂波反射系数最小,此角度称为布儒斯特角[4-5]。因此,采用垂直极化的雷达照射信号,通过弹道设计和导引律优化,使导弹攻击目标过程中,擦地角接近布鲁斯特角,可以减弱地面镜像干扰的影响,是拦截超低空目标可行的技术途径。文中就是基于这种思想,设计了一种初段(程序转弯)+中段(导引律补偿)+末端(比例导引律)的总体弹道方案,进行Matlab仿真验证分析,并在此基础上进行弹道优化,分析不同参数对导弹弹道特性的影响。
1 多路径效应描述与超低空拦截模型
1.1 多路径效应问题描述
如图1所示,F为地海杂波反射点,β为擦地角,目标信号返回路径为P1,地海杂波反射回的路径为P2。目标超低空飞行时的地海杂波反射强度大(有时甚至超过目标本体),因此导引头可能会将镜像目标T′当作目标进行攻击。
地海杂波的反射系数随擦地角的变化而变化,当擦地角达到某一个值时,反射系数最小,此反射系数最小时对应的擦地角称为布儒斯特角。在不同的环境下(草地、海面),布儒斯特角的大小也不尽不同。以某一恒定环境为例[6],其反射系数随擦地角的变化规律如图2。
图1 导弹、目标及镜像几何关系
图2 反射系数与擦地角关系
1.2 擦地角的近似计算
从拦截超低空目标的需求出发,要保证中段擦地角约束在布儒斯特角附近。但在实际飞行中,导弹难以实时测量擦地角的大小,并且从导引律的角度来看,通过导弹和目标的视线角更易实现,因此要首先分析弹目视线角与擦地角的差异[7]。
以飞行高度150 m为例,分别计算不同距离下的擦地角均为10°时的弹目视线角数值。
表1 擦地角与视线角的误差
从表1可以看出,拦截超低空目标的飞行弹道,当弹目距离较远时,真实目标和镜像目标相对于导弹的视线角差异较小;接近目标时,两者之间的差异增大。虽然两个角度之间有一定的误差,但是在导引律的设计过程中,针对视线角进行修正更容易实施,因此考虑设计中段制导律时弹目距离较远,可针对视线角或视线角速率进行修正,将其约束在布儒斯特角附近,提高导弹制导精度。
1.3 超低空拦截模型
下面进行超低空拦截模型的建立。三维空间可为纵向的俯仰平面和横向的转弯平面,为方便分析只研究纵向的俯仰平面即可,如图3所示:M代表导弹,vm为导弹的速度,θm为导弹弹道倾角,am为导弹的法向加速度;T代表目标,vt为目标的速度,θt为目标的航迹倾角,at为目标的法向加速度;R为导弹到目标的距离;q为导弹和目标之间的视线角;按照导弹飞行力学[6],所有角度沿逆时针旋转为正,顺时针为负。
图3 弹目相对运动关系
由图3可知,弹目间的相对运动方程[7]为:
(1)
根据式(1)可得出:

(2)
2 弹道设计
导弹在拦截目标的过程中,目标紧贴于地面或者水面飞行,导弹可在较高的高度飞行,通过雷达导引头下视跟踪目标。目标运动的特点决定了对于超低空目标拦截的弹道形式。
导弹从地面垂直发射,到达一定高度后向目标来袭方向转弯,导引头截获目标后进入中制导段,中段飞行时通过弹上雷达导引头探测目标信息,末段进行俯冲攻击。在转弯后中段飞行的过程中,需要将视线角控制在布儒斯特角附近。
按照以上的需求,弹道设计方案如图4所示。

图4 弹道方案
根据飞行弹道的特点,可将其分为初始转弯段、中制导段和末端攻击段[8]。
2.1 初始转弯段
对于拦截超低空目标的飞行弹道设计而言,初始转弯段采用程序控制,与目标无关。导弹以预定的仰角发射后,到达一定高度后向来袭目标方面转弯飞行。此过程中,通过合理参数设置,采用给定弹道倾角的设计规律,为中段的导引飞行提供较好的初始条件。具体分为以下几个阶段:
1)助推段
导弹发射后,在助推器的作用下,按照给定的弹道倾角(弹道倾角为常值)加速爬升。记助推器工作时间为t1,则弹道倾角和加速度变化规律为:
(3)
2)滑翔段
助推器工作结束后,导弹保持速度不变,接着向上爬升,上升到一定高度开始向目标转弯。记开始转弯时间为t2,则弹道倾角和加速度变化规律为:
(4)
3)转弯段
滑翔段结束后,导弹开始按照预定程序开始转弯,并最终转平。转弯段弹道倾角的变化规律可按飞行时间给出。记转弯段结束时间为t3,为满足飞行过程中弹道倾角和弹道倾角变化率连续,转弯段弹道倾角变化规律需满足以下条件:
2.2 中段制导段
现役导弹大多采用经典的比例导引律或修正的比例导引律,而导弹按照比例导引法飞行时,视线角基本取决于导弹发射的初始信息,并没有布儒斯特角的约束要求,一般无法满足布儒斯特角约束。因此,可以在现有比例导引律的基础上,通过引入补偿量,对比例导引律进行修正,使导弹攻击过程中视线角满足布儒斯特角约束。修正后的导引关系可写为:
(5)
式中x为补偿量。
基于上述分析,问题即转变为:如何构造补偿量x,在不增加新的反馈信号的前提下,使其按照改进的导引律实现布儒斯特角约束要求[9]。


图5 视线角速度变化曲线
由图5可知,从0时刻到tf时刻,视线角速度的变化规律满足三次样条曲线,其多项式表达式可写为:
(6)
式中:a、b、c、d为待定参数。根据视线角速度变化规律设计要求,上式需要满足的约束条件具体为:

可解得待定参数a、b、c、d,得到视线角速度变化规律前半段。因此,满足布儒斯特角约束要求的视线角变化规律可表示为:
(7)
下面进行中制导律的推导:
根据导弹-目标相对运动方程,在Δt时间内,由补偿量所引起的视线角速度变化量可表示为:
(8)
在导弹攻击目标过程中,雷达导引头和控制系统的工作频率较高,因此可假定在较短时间内,补偿量所引起的导弹弹道倾角变化为小量(即xΔt为小量),则有:
sin(xΔt)≈xΔt, cos(xΔt)≈1
(9)
则上式可写为:
(10)

(11)
2.3 末端攻击段
进入末端后,导引头已经可以有效区分目标,因此可以解除布儒斯特角的约束要求,从而利用导弹自身的导引律设计,实现对目标的有效攻击[10]。通常,采用比例导引律为:
(12)
也可根据型号设计,采用扩展比例导引律。
3 弹道仿真
按照上一节所设计的初始转弯段、中段制导段以及末端攻击段的弹道方案,对导弹飞行过程进行仿真分析[11]。
设超低空目标贴着地面做匀速直线飞行,初始高度yt=100 m,初始位置为xt=80 km,速度vt=270 m/s,弹道倾角θm=0°;导弹从地面垂直发射,助推段加速度am1=30g,发动机工作时间t1=6 s,转弯段加速度am2=1g,转弯段开始时间t2=8 s,转弯段结束时间t3=16 s,结束时弹道倾角θm=0°,中段调整时间tf=5 s,转入末端距离X1=6 km;布儒斯特角在15°左右。
图6 导弹/目标运动轨迹
由图6可以看出,导弹从地面垂直发射,经过初段程序转弯,中段制导,再加上末段打击,最后成功拦截目标,而且所设计的弹道较为平直,大大增强了导弹的机动性,降低了过载,提高了制导的精度。由图7、图8可以看出,在转弯结束后,导弹视线角能够快速向布儒斯特角靠近,并且到达后能够保持不变,视线角速率变化也趋于零,满足制导要求。由图9可以看出,程序转弯结束后导弹的弹道倾角为0°,满足设定值,并且弹道后期速度倾角也基本保持不变。
图7 视线角变化图
图8 视线角速率变化图

图9 弹道倾角变化图
4 弹道优化
从上节的弹道仿真结果中可以看出,当初段结束后,导弹采用修正的比例导引法,将视线角转动到期望视线角。
但在过渡段飞行过程中,导弹法向过载变化相对剧烈,若参数选取不合理,就会严重影响弹道特性,甚至会出现导弹飞行弹道无法满足布儒斯特角约束,不能按照预定方案攻击命中目标。因此需对弹道各段参数进行优化。为便于研究,约束条件保持不变,分别改变转弯段开始时间t2,转弯段结束时间t3,结束时的弹道倾角θm和中段调整时间tf,对比观察它们对导弹飞行弹道的影响。
1)转弯段开始时间t2
在此参数分析中,转弯段结束时间均为t3=16 s,结束时的弹道倾角均为θm=0°,中段调整时间均为tf=5 s,观察转弯段开始时间t2分别为4 s、6 s、8 s、10 s。
图10 不同t2下的弹道轨迹图
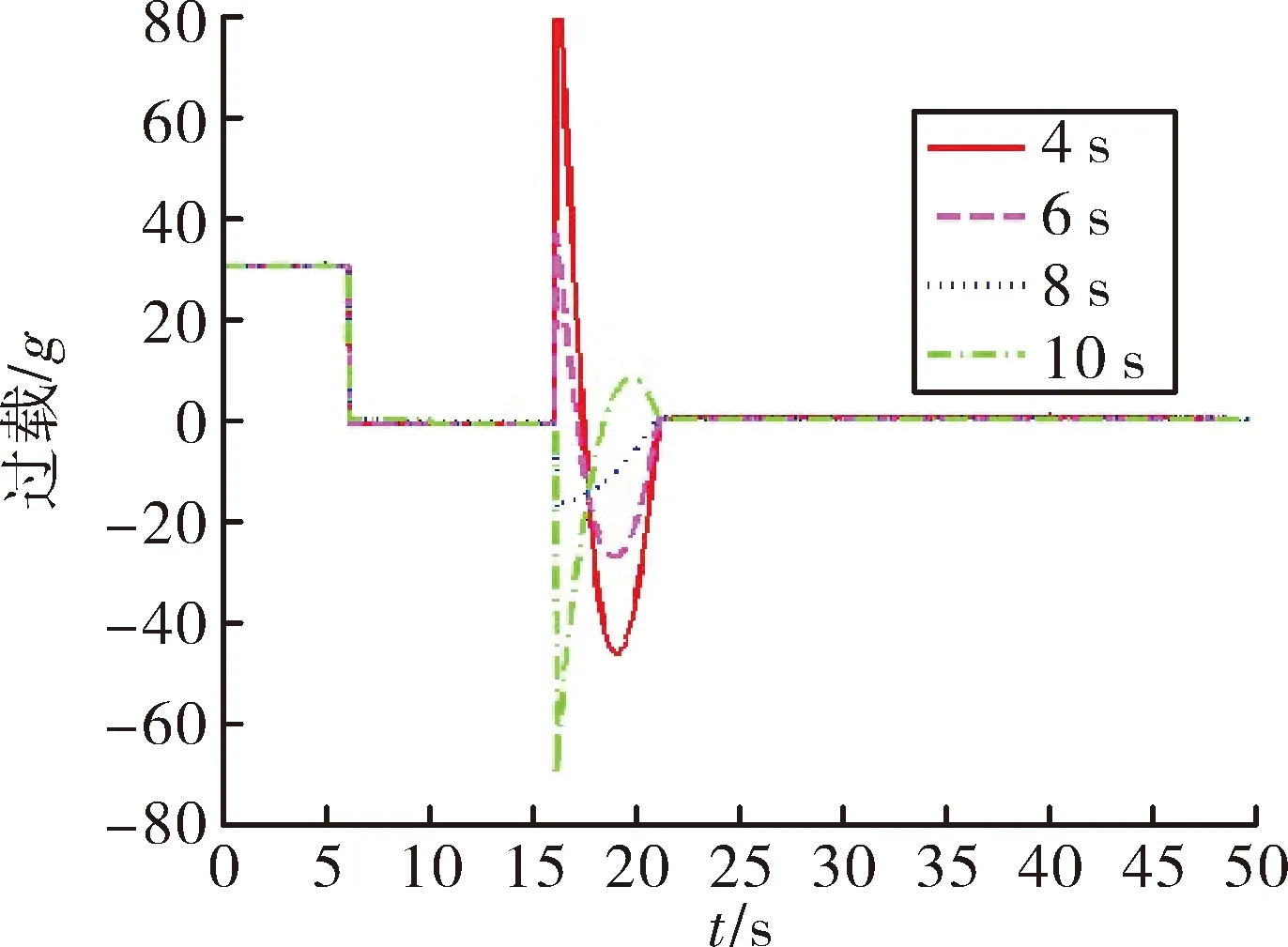
图11 不同t2下的过载变化图
由图10、图11可以看出,转弯越早,导弹达到的最大高度越小,中制导段的初始视线角越小,体现在弹道上,助推转弯结束后,导弹还需要略有爬高,才能调整到布儒斯特角的约束要求;反之,转弯越晚,中制导段的初始弹目视线角越大,为满足约束要求,需要将弹道进行压低。如果参数设计合理,则弹道连续光滑过度,过载较小。
2)转弯段结束时间t3
在此参数分析中,转弯段开始时间均为t2=8 s,结束时的弹道倾角均为θm=0°,中段调整时间均为tf=5 s,观察转弯段结束时间t3分别为15 s、16 s、17 s、18 s。
由图12、图13可以看出,转弯时间对于弹道也有较为明显的影响。转弯持续时间越长,助推段结束时刻的高度就越大,进入中段需要进行弹道压低,从而造成中段的初始过载较大。
3) 转弯结束时的弹道倾角θm
在此参数分析中,转弯段开始时间均为t2=8 s,转弯段结束时间均为t3=16 s,中段调整时间均为tf=5 s,观察转弯段结束时弹道倾角θm分别为4 s、6 s、8 s、10 s。
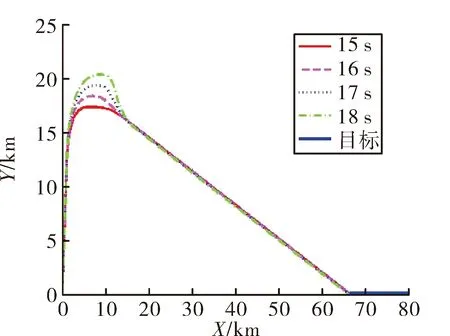
图12 不同t3下的弹道轨迹图
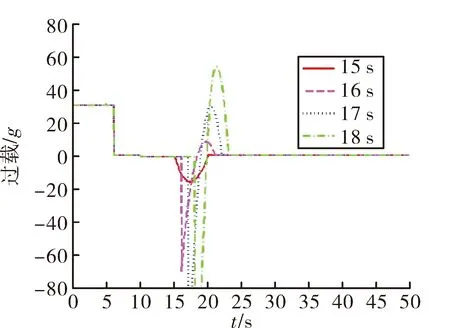
图13 不同t3下的过载变化图
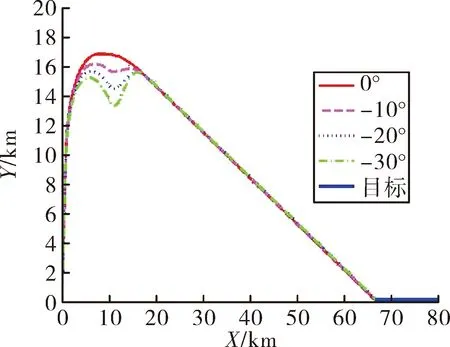
图14 不同θm下的弹道轨迹图
图15 不同θm下的过载变化图
由图14、图15可以看出,转弯结束时刻的弹道倾角不同,一方面导弹高度有所差异,另一方面中制导段的初始条件变化,对于过载有较大的影响。就上述参数而言,弹道倾角越小,更有利于助推转弯段到中制导段的平滑过渡。
4)中段调整时间tf
在此参数分析中,转弯段开始时间均为t2=8 s,转弯段结束时间均为t3=16 s,结束时的弹道倾角均为θm=0°,观察中段调整时间tf分别为4 s、6 s、8 s、10 s。

图16 不同tf下的弹道轨迹图
图17 不同tf下的过载变化图
由图16、图17可以看出,相同的助推段条件下,调整时间tf越长,中制导段的过载越小,弹道越平滑。但是,调整时间长,意味着跟踪目标的滞后,这与弹道平滑要求相矛盾,需要综合权衡考虑。
5 结束语
文中讨论了导弹在垂直发射条件下的超低空目标拦截的问题。针对在拦截过程中出现的多路径问题,确定了布儒斯特角的位置,建立拦截弹道模型,研究出将视线角约束在布儒斯特角附近的改进比例制导律,使地海杂波干扰降至最低;将弹道分为初始转弯段、中制导段和末端攻击段,设计出了一种导弹从发射到最后击中目标的全程弹道,并进行了仿真验证。结果表明,所设计的弹道较为平直,并且满足要求,制导精度较高,具有较强的借鉴意义。
