网络化电路仿真在拖拉机电器故障诊断中的应用
2019-05-27高红波
高红波
(洛阳职业技术学院,河南 洛阳 471003)
0 引言
伴随汽车发展而来的是能源问题。根据国际能源机构预测,随着经济的发展、社会的进步和人口的增长,全世界的能源消耗在今后20年至少增加1倍。世界原油价格的不断上涨,已经预示着能源危机的出现,为了有效地解决能源危机,最直接的方法是用新的、清洁无污染的燃料代替燃油。拖拉机是农业生产中最常用的机械之一,其燃料消耗和污染排放都较大,为了达到节能减排的目的,可以采用新能源发动机和智能电器化改造的方法。其中,电器故障诊断是电器化改造的重要环节。由于控制系统较为复杂,因此对于智能化诊断系统的研究具有重要意义。
1 新能源拖拉机空调电器及控制系统
新能源拖拉机除了节能环保之外,还可以通过车内空调系统为农机操作者提供一个舒适的驾驶和乘坐环境。为了提高拖拉机空调的智能化控制,可以采用CAN总线对空调系统进行智能化控制,基本框架如图1所示。利用CAN总线驱动可以实现空调压缩机的速度变化,通过CAN总线将转速信息传递给VMS,通过反馈调节的方式对转速进行实时控制,从而可以有效地调节空调温度,达到节能的目的。
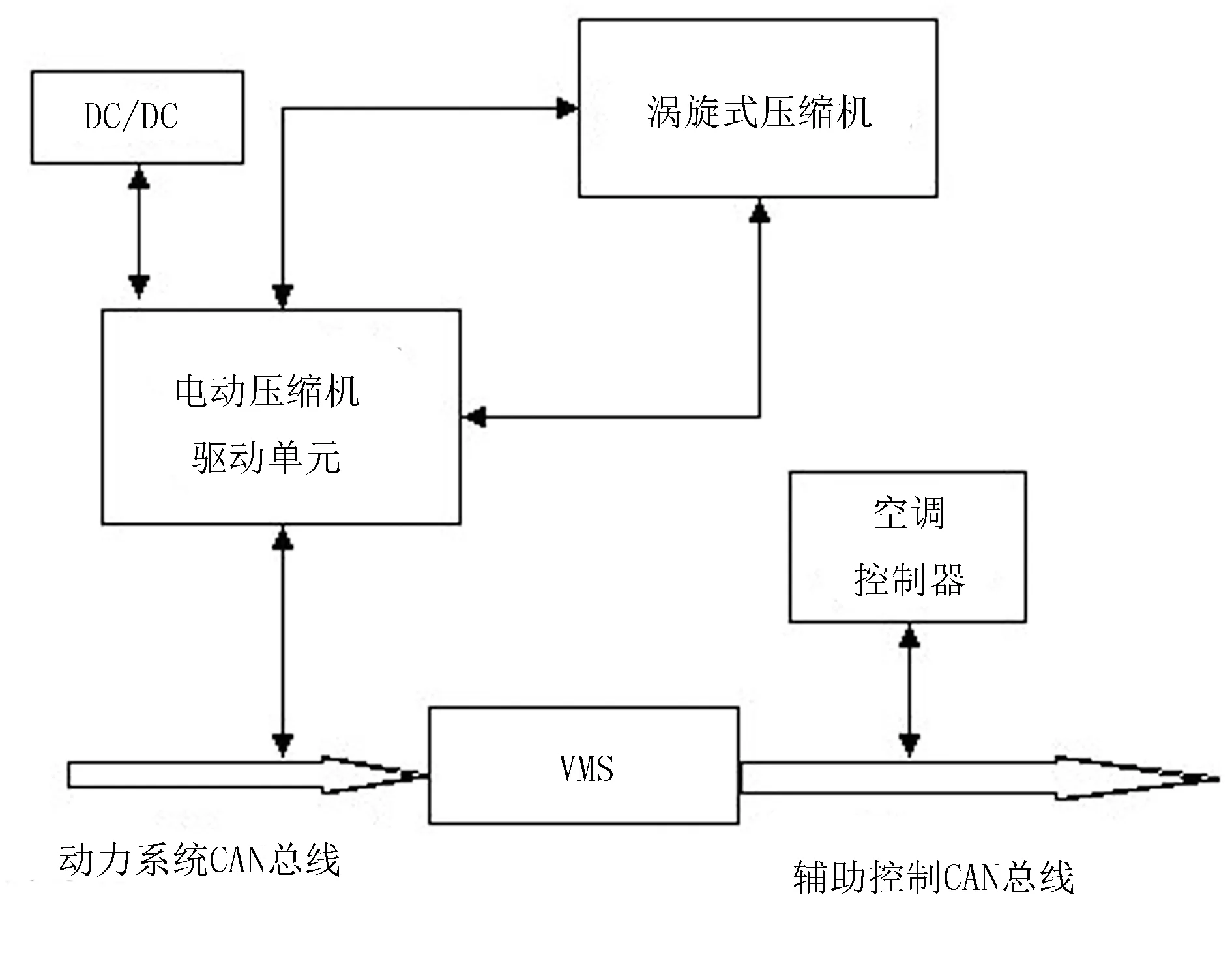
图1 新能源拖拉机空调驱动示意图
为了实现图1的空调控制基本框架,可以采用全自动电子控制方案,利用微处理器MCU实现核心调节器的智能控制,利用传感器信号采集反馈给控制系统,从而达到智能控制的目的,如图2所示。

图2 新能源拖拉机空调节能控制器
2 基于神经网络的新能源拖拉机电器系统故障诊断
新能源拖拉机电器系统在工作过程中可以利用传感器采集一系列的数据,如果采用一定算法将正常数据和故障数据进行训练,可以有效地提高电器系统故障诊断的智能化程度。神经网络算法是一种智能化程度较高、准确性较好的学习训练算法,并且可以通过改进学习参数,调整学习权值,提高训练的准确性。本次研究主要采用神经网络学习算法对新能源拖拉机电器系统故障诊断系统进行优化设计,其结构如图3所示。

图3 神经网络学习算法结构

图4 基于神经网络学习算法的PID控制器结构
network learning algorithm
为了便于计算机仿真,被控对象采用离散化模型。PID控制器采用经典的数字式PID控制器,其中经典增量式数字PID的控制算法为
u(k)=u(k-1)+kp[error(k)-error(k-1)]+
kierror(k)+kd[error(k)-2error(k-1)+
error(k-2)]
(1)
其中,kp、ki、kd分别为比例、积分、微分系数。
神经网络输入层的输入为
(2)
其中,输入变量的个数M跟控制系统的复杂程度有关,网络隐含层的输入、输出为

(3)

(4)
网络输出层的输入输出为

(5)
输出层输出节点分别对应3个可调参数kp、ki、kd,由于kp、ki、kd不能为负值,在仿真中利用的是离散化的控制对象,对故障判断的准确性进行实时反馈,从而可以调整电器故障诊断的准确性,提高电器故障诊断的速度。
图5表示对新能源拖拉机电器故障诊断的正常和故障数据样本的训练过程。将给定的样本输入到神经网络学习算法中,可以求出期望目标值和实际输出值得偏差。然后利用误差反馈调节修正权值,使其达到最终想要得到的计算精度,当达到要求的计算精度时,学习过程结束;如果达不到要求精度,则继续进行神经网络训练,新能源拖拉机电器系统故障诊断的流程如图6所示。
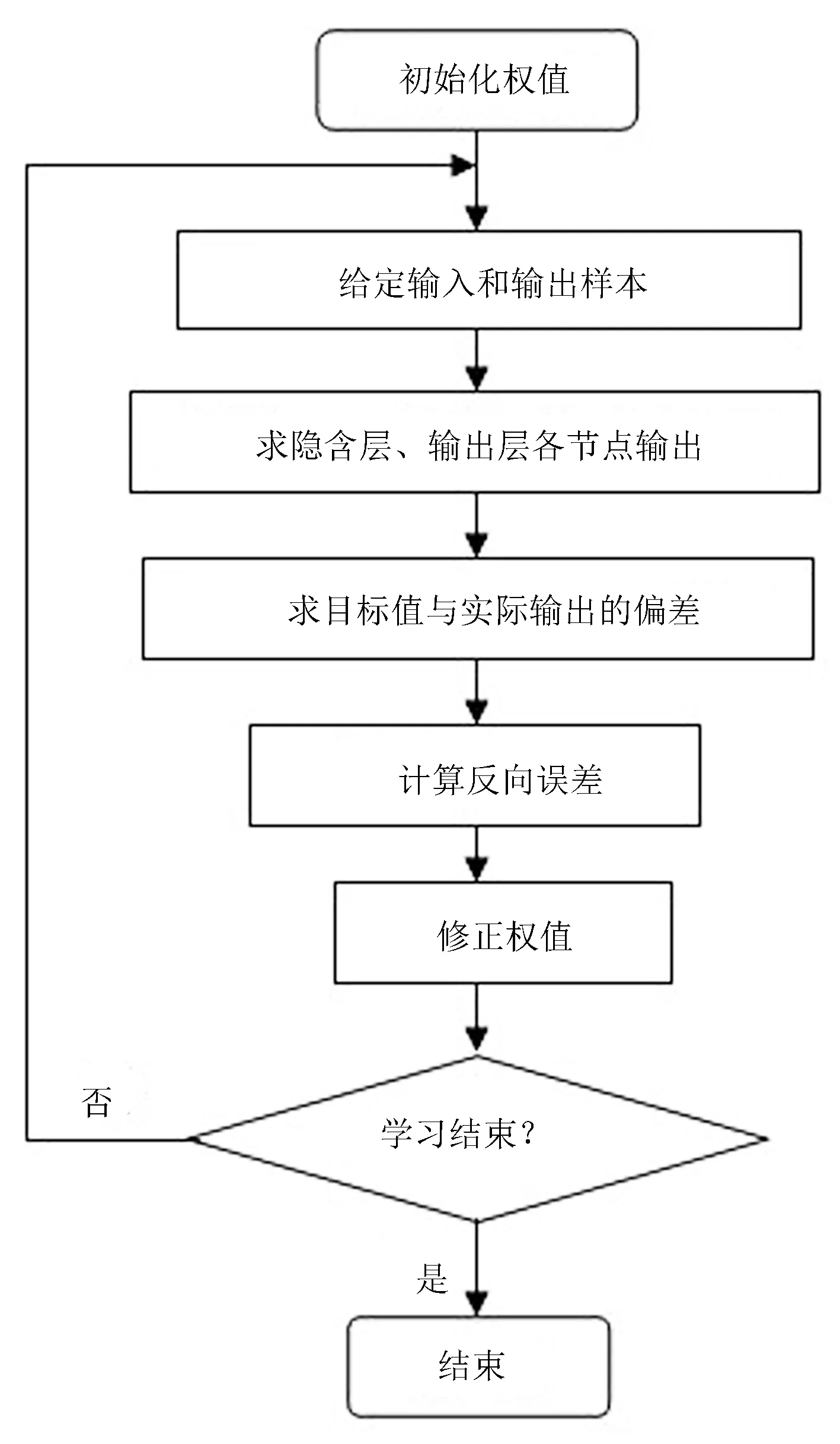
图5 神经网络训练过程图

图6 基于神经网络算法的电器系统故障诊断
neural network algorithm
通过神经网络训练后可以得到检测样本的数据,将检测样本数据和实际测试数据进行对比,便可以得到故障诊断结果。
3 新能源拖拉机电器系统故障诊断测试
为了验证神经网络学习算法和仿真系统在新能源拖拉机电器系统故障诊断中的可行性,根据第1节得电器节能系统设计和第2节的神经网络学习算法,对诊断系统进行了测试,拖拉机模型如图7所示。

图7 拖拉机模型示意图
以一款新型拖拉机的电器系统为例,采用新能源混合动力技术对空调电器系统进行改造,并建立了基于神经网络技术的空调电器故障诊断系统,利用系统首先对电器系统正常的数据流进行训练,其具体数据如表1所示。
在进行神经网络训练时,可以将多组正常数据样本进行神经网络训练,提取相应的特征值,然后导入故障数据进行神经网络训练。电器系统存在故障时的数据如表2所示。

表1 新能源拖拉机电器系统正常工作时的数据流

表2 新能源拖拉机电器系统故障时的数据流
将新能源拖拉机电器故障时的数据导入到神经网络仿真系统中进行训练后,可以实现故障的智能化诊断。不使用PID调节器和使用PID调节器的计算误差分别如图8和图9所示。

图8 不使用PID训练误差变化曲线
为了验证PID调节器在神经网络训练过程中的有效性,将不使用PID调节器训练的计算误差进行了计算得到了如图8所示的结果,其计算收敛误差达到了10-1精度,误差较大。

图9 使用PID训练误差变化曲线
使用PID调节器后的计算误差仅为10-2,误差较小,计算精度较高,对有无故障的电器系统分别进行了测试,结果如表3所示。

表3 测试样本诊断结果
分别对有故障和无故障的电器系统进行了测试,结果表明:基于神经网络仿真的诊断系统对电器系统故障的诊断精度较高,最低精度在98%以上,可以满足新能源拖拉机电器系统智能化诊断的需求。
4 结论
为了提高新能源拖拉机空调电器智能化诊断的效率和水平,基于神经网络算法和PID控制器,对诊断系统进行了优化设计,建立了基于神经网络技术的空调电器故障诊断系统,并以一款新型拖拉机的电器系统故障诊断为例,对系统性能进行了验证。结果表明:采用神经网络仿真系统对新能源拖拉机空调系统进行故障诊断可以有效地提高故障判断的准确性,降低了人为判断的片面性,在无需专业技术人员的情况下也可以达到智能检测的目的。