链齿式残膜回收机捡拾机构参数优化及试验
2019-05-27白圣贺张学军韦忠正
白圣贺,张学军,靳 伟,方 旭,罗 凯,韦忠正
(1.新疆农业大学 机电工程学院,乌鲁木齐 830052;2.济南技师学院,济南 250001)
0 引言
20世纪50年代开始,农业生产已经运用了地膜覆盖技术,因为它不仅具有改善环境,保持水分,提高土壤温度的功能,还可以提高粮食的产量,因此在全世界得到了广泛的推广应用。由于地膜的优异特性,农民大量使用地膜,最终导致了土地的一系列问题,残膜的处理也变得十分重要。20世纪70年代初,我国已经开始把地膜覆盖技术运用在农作物上,并且应用的品种越来越多,薄膜的使用率也不断增加[1-5]。
目前,在使用地膜覆盖技术时,只考虑了给农业带来巨大发展的方面,忽略了使用过的地膜没有被及时完整地回收,长时间存在土壤里,逐年积累,导致大面积的耕地遭到严重地破坏,甚至在许多地区形成了“白色污染”[6-10]等问题。由于技术缺乏加上基本国情限制,可降解地膜很难在短时间内代替塑料地膜而得到广泛的推广和使用,加上残膜回收机的成本高,对残膜回收机的研发技术缺乏,与收膜有关的问题还没有得到进一步的解决。为此,设计了一种链齿式残膜回收机,工作性能良好,成本较低,满足农民的需求,促进了农业的发展。
1 整机结构与工作原理
1.1 工作原理与结构设计
链齿式残膜回收机结构主要由牵引架、入土起膜铲、捡拾装置、卸膜板、集膜箱、传动系统及机架等组成,如图1所示。
整个机具通过牵引架与拖拉机连接,动力后输出轴通过花键与减速箱输入轴相连接,在拖拉机的牵引作用下向前行进。行进过程中,入土装置可深入耕层150mm以下对残膜进行回收,且入土装置可以调节入土深度,入土起膜铲通过紧定螺钉安装在入土器板上。工作时,入土起膜器把地表以下残膜回收到地表上,由捡拾装置中的链轴作为动力输出轴,链轴带动捡拾装置上的弹齿把残膜进行挑起,然后把捡拾的残膜输送到卸膜装置,进行卸膜,回收到集膜箱中。在拖拉机不断行进的过程中,机构不断重复这个过程,实现地表残膜连续回收。
1.2 主要技术指标
表1所示为链齿式残膜回收机主要的工作性能技术参数。
2 试验设备与方法
2.1 试验地点
试验地点选在耕后播前的棉花地,如图2所示。在新疆生产建设兵团农一师六团,该地土壤类型为沙性土,地面比较平整且棉花秸秆已回收。试验对象为耕后播前的耕层内的残膜,覆膜宽度680mm,厚度0.008mm。
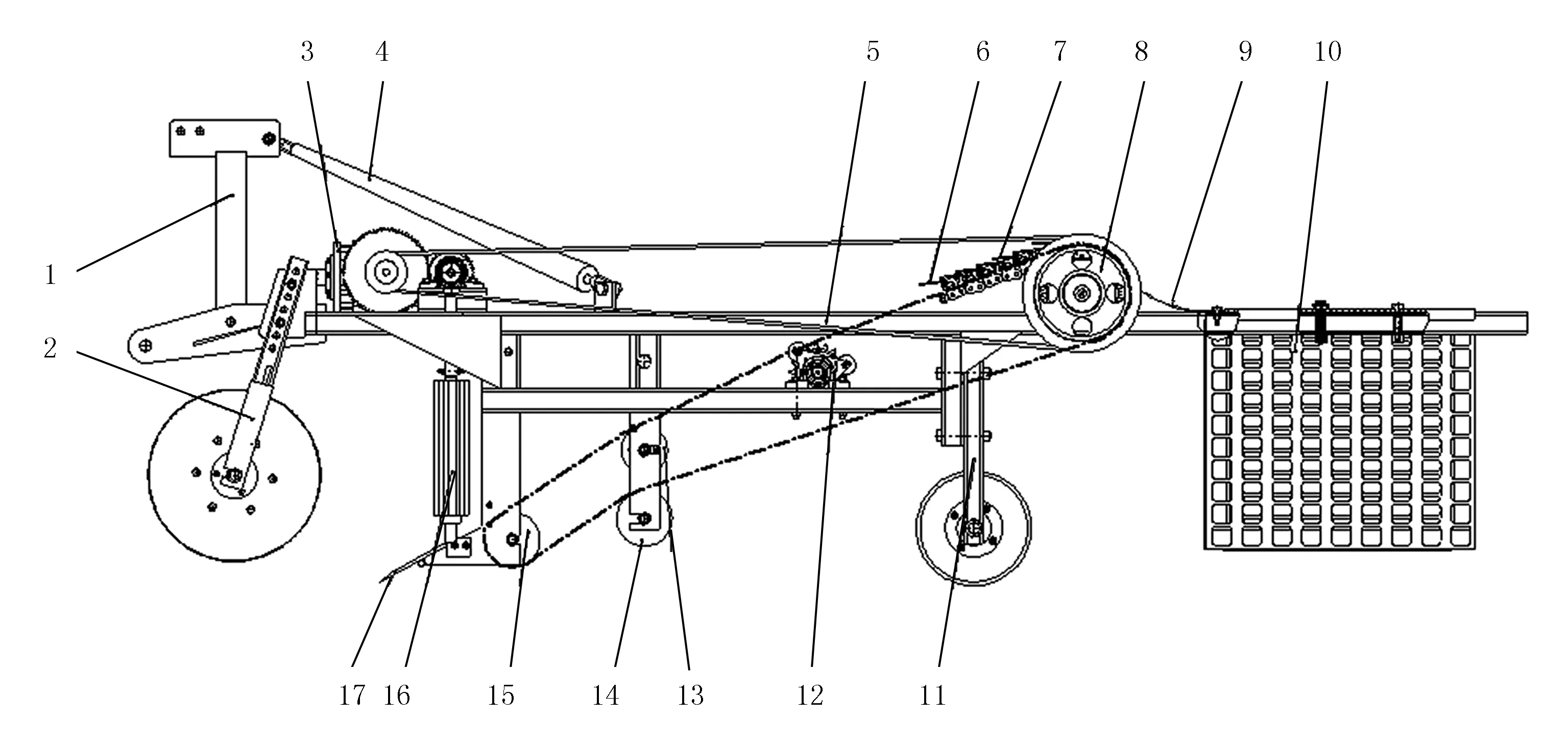
1.限深轮 2.牵引架 3.传动系统 4.支撑装置 5.机架 6.弹齿 7.链杆 8.传动轴 9.卸膜板 10.集膜箱 11.后轮 12.抖动装置 13.上托辊 14.下托辊 15.从动辊 16.拨秧辊 17.入土起膜铲
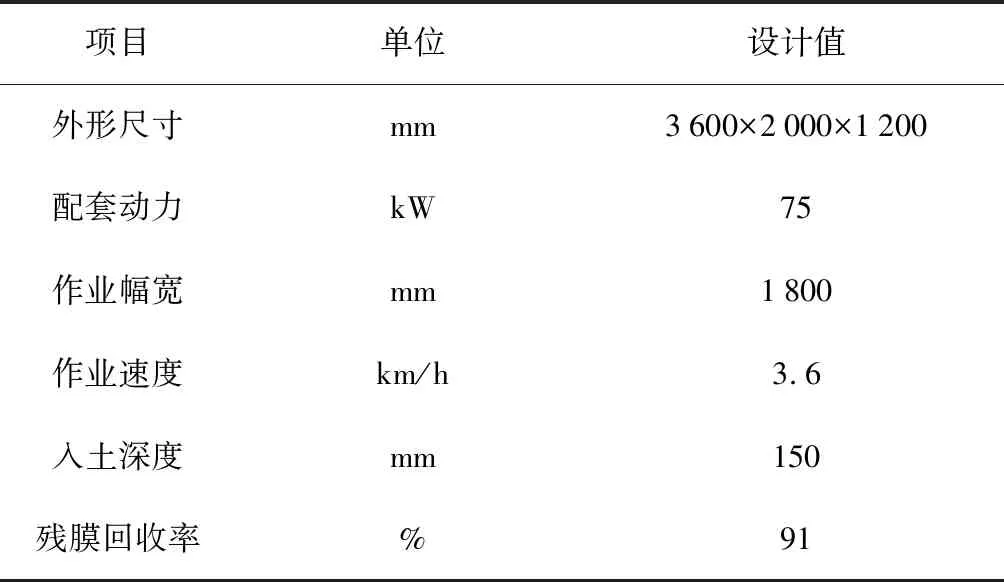
表1 链齿式残膜回收机的主要工作性能技术参数

图2 试验地点
2.2 试验设备
主要仪器设备有约翰迪尔-754型(56kW)收膜机、OHAUS CP3102电子秤(精度0.01g)、铁锹、相机、卷尺(0~100cm)、若干纸笔和塑料袋。
2.3 试验指标
残膜捡拾率J1直接决定链齿式残膜捡拾机捡拾装置的整体工作性能的主要因素,其计算公式为

(1)
式中M1—试验100m长度时膜箱中残膜的质量,单位为(g);
M2—试验100m长度时散落到地表的残膜质量(g);
M3—试验100m长度时缠绕在捡拾装置上的残膜质量(g);
M4—试验100m长度时缠绕在土膜分离装置上的残膜质量(g)。
2.4 试验因素
根据残膜回收机的整体结构设计与工作原理、捡拾装置的设计与分析、田间的试验结果,可以初步确定试验因素为捡拾转速A、入土深度B、捡拾齿轴向间距C、捡拾齿轴向间距D,把残膜捡拾率Y作为响应值,确定试验因素的取值范围:捡拾转速70~100r/min,入土深度130~160mm,捡拾齿周向间距75~105mm,捡拾齿轴向间距15~45mm。采用Box-Behnken方法设计试验方案,进行四因素四水平响应面分析试验,一共有29个试验点。具体的响应面试验设计方案和试验结果如表2和表3所示。

表2 响应面因素水平编码表

表3 Box-Behnken设计方案及试验结果
3 结果与分析
3.1 回归方差分析
运用Design-Expert 8.060软件进行响应面分析,建立了以残膜捡拾率Y为响应值的多元二次回归方程。同时,对响应指标的4个因素进行了显著性分析与检验,得到了响应面模型的方差分析结果,如表4所示[11]。
残膜捡拾率的回归方程为
Y=+89.60+6.17A+0.42B+1.17C+1.25D-
2.00AB+0.50AC+1.00AD+0.00BC-
0.25BD-1.50CD-7.92A2-3.80B2-
3.93C2-4.80D2
(2)
式中Y—残膜捡拾率(%);
A—捡拾转速(r/min);
B—入土深度(mm);
C—捡拾齿周向间距(mm);
D—捡拾齿轴向间距(mm)。

表4 回归方差分析结果
由表4可知,该响应模型是极其显著的(P<0.000 1)、失拟性(P>0.000 1)。其中,A捡拾转速、C捡拾齿周向间距、D捡拾齿周向间距、AB捡拾转速与入土深度的交互、A2捡拾转速二次项、B2入土深度二次项、C2捡拾齿周向间距二次项、D2捡拾齿轴向间距二次项的P<0.05,因此上述因素对残膜捡拾率影响显著。根据模型中各因素显著水平P值的大小,可以得到影响捡拾率大小的顺序为A>D>C>B。
3.2 响应面优化分析
链齿式残膜回收机中,捡拾装置捡拾转速A、入土深度B、捡拾齿周向间距C、捡拾齿轴向间距D之间的交互作用对捡拾率Y的响应曲面图如图3所示[12]。
借助响应面优化模型和回归方程,运用Design-Expert软件中的Optimization-Numerical模块对回归方程模型进行该目标下的优化分解,得到机具的最优工作参数为:当捡拾转速91.41r/min、入土深度143.48mm、捡拾齿周向间距91.49mm、捡拾齿轴向间距32.31mm时,残膜的捡拾率达到91.02%,与进行验证试验的实际值相接近,基本相互符合。这表明,响应面分析的实际值与进行的优化值误差很小,建立的回归方程模型是可靠的,具有一定的实用价值。
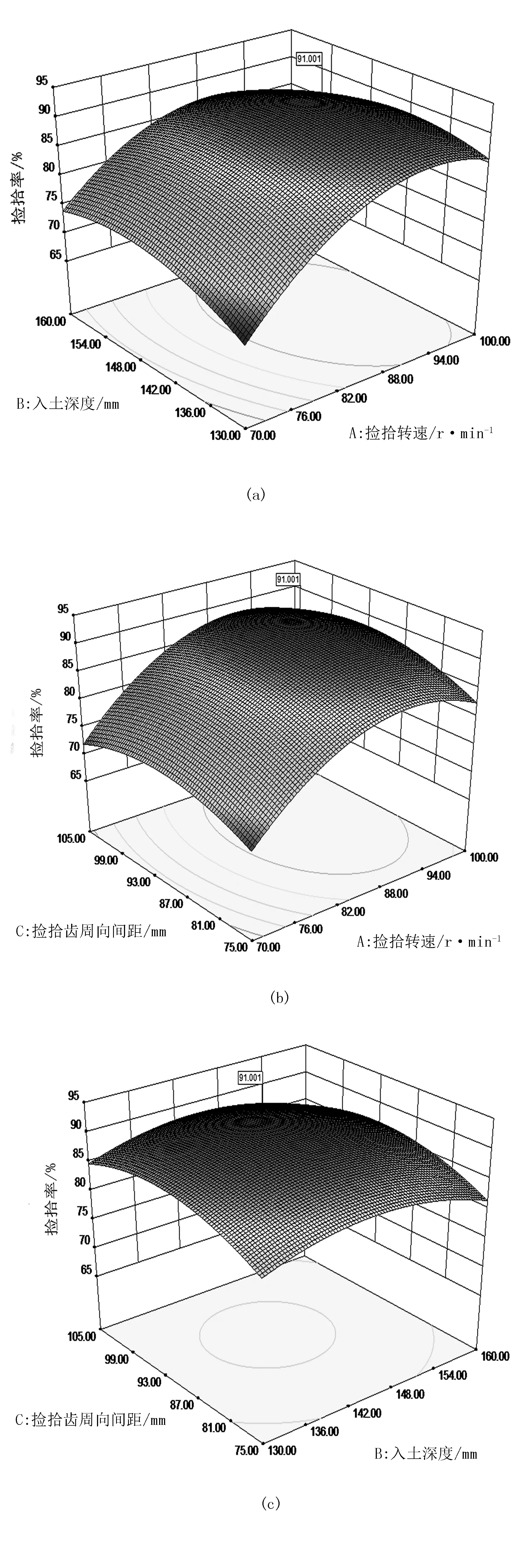

图3 响应曲面优化图
4 结论
1)介绍了该链齿式残膜回收机的整机结构与工作原理,进行了捡拾装置的优化试验设计。结果表明:该机具工作性能良好,捡拾效率较高,满足残膜作业要求。
2)通过回归方差分析,得到了响应值与各个因素之间的方程关系及各个因素对捡拾率的影响程度大小依次为:捡拾转速>捡拾齿轴向间距>捡拾齿周向间距>入土深度。
3)运用Design-expert软件,采用Box-Benhnken设计试验方案,对捡拾转速、入土深度、捡拾齿周向间距及捡拾齿轴向间距进行回归方差分析,并建立响应曲面优化模型,得到最优化参数:当捡拾转速91.41r/min、入土深度143.48mm、捡拾齿周向间距91.49mm、捡拾齿轴向间距32.31mm时,残膜的捡拾率达到91.02%。其相对误差较小,模型比较可靠。