电动助力式螺旋条施机控制系统的设计
2019-05-27李晓贤任震宇何培祥
李晓贤,赵 进,任震宇,陈 昶,何培祥
(西南大学 工程技术学院,重庆 400715)
0 引言
在现代农作物种植过程中,施肥是必不可少的一个环节,精量合理的施肥不仅可以提高肥料的利用效率,还有利于农作物的生长,实现作物高产[1]。在西南丘陵地区,多采用小型施肥机或者人工施肥。人工施肥劳动强度大且施肥随意性较大;小型施肥机多为条施方式但是容易出现行走轮打滑,且由于肥料自身特性容易出现肥料堵塞、架空和漏施现象,从而导致施肥不均的问题[2]。该条施机安装行走电机进行助力[3],采用排肥性能更好的竖直螺旋排肥机构,并加入模块化设计的控制系统,实现降低劳动强度、均匀施肥和提高肥料的利用率的目标,为山地丘陵地区的小型施肥机及精量控制系统的设计提供了参考[4]。
1 电动助力式螺旋条施机的结构和原理
为了降低劳动强度,在靠操作员手推的小型施肥机上添加助力电机。开始施肥时,操作者首先在肥箱内装入一定量的颗粒状复合肥,调整控制器上的施肥量设置旋钮设定施肥量;然后手握把手,打开工作开关,助力电机会通过链传动带动行走轮转动,依据控制器储存在其中的施肥量数据和行走轮转速检测装置的信号,确定输入步进排肥电机的脉冲频率,从而控制该条施机的竖直螺旋排肥机构实现均匀施肥[5-10]。电动助力式螺旋条施机的结构如图1所示。

1.工作开关 2.操作扶手 3.步进排肥电机 4.肥箱 5.助力电机 6.链传动 7.行走轮 8.竖直螺旋排肥机构 9.支撑杆 10.轮速检测装置 11.施肥量设置装置
1.1 竖直螺旋式排肥器的参数
电动助力式螺旋条施机的主要工作部件是竖直螺旋排肥器,利用肥料自身重力及叶片推动力实现排肥作业,从而避免了传统排肥器的排肥架空结块问题。竖直排肥器机构及控制模型如图2所示[11]。
条施机在实际作业过程中,由于螺旋排肥结构的截面积是一定的,因此在确定排肥器参数时还应当考虑实际的操控性及机器功率,实现最优控制。
通过实验分析发现:若要达到良好的一致性和稳定性,排肥器截面积应适当增大,但也会增加条施机的输出功率,在施肥量少的情况下施肥精度也会降低。考虑实际作业中单位长度上的施肥量与条施机的作业速度要求,通过实验得出:当排肥器直径D=48mm、d=18mm 、螺距I=22mm 时,条施机满足工作要求。

图2 竖直排肥器结构及控制模型
1.2 电动助力式螺旋条施机的原理
步进电机是一种将电脉冲信号转换成相应的线性位移或角位移的执行元件,具有快速启停能力、精确步进及直接接受数字量等特点[12]。步进电机驱动排肥器的原理如图3所示。工作时,步进电机转角通过控制芯片的脉冲频率来控制,频率不同转动角度也不同,转角连续不断变化(即步进电机转速变化),进而步进电机又驱动排肥器动作,实现排肥作业。由于步进电机的转动角度通过脉冲频率精确控制即转速可以精确调节,因而能够实现精确排肥[13]。

图3 步进电机驱动排肥器原理图
2 控制系统的软件设计
该条施机的控制系统设计(见图4)思路如下:主控制芯片上电后首先进行初始化[14],包括振荡器模块、复位寄存器、数据存储器、中断寄存器、I/O端口、时间寄存器及模数转换模块等;清看门狗WTD,通过循环判断PIC18F13K22芯片的C口的第0位电平来判断作业开关的开合状态:低电平,表示作业开关未开,关闭排肥口,继续循环;高电平,表示作业开关打开,打开排肥口,退出循环。然后,继续对施肥量进行采集处理,施肥量信号为模拟量信号,通过带有刻度盘的操作旋钮控制施肥量并产生模拟量信号,经过AD转换送入控制器的存储单元;最后开中断,在中断寄存器中设置定时器0溢出中断、允许RA/RB端口电平变化中断,中断触发方式为下降沿触发,允许外部中断2中断。
此外,控制器中还设计了蜂鸣器与LED指示灯,以提示操作者。条施机轮速信号由装有霍尔传感器的装置产生并将信号送入控制器,经过相应算法处理后,产生PWM控制信号控制步进排肥电机转速,从而驱动竖直螺旋螺旋排肥器按设定的排肥量进行作业。

图4 控制系统流程图
3 控制系统硬件设计
控制系统采用PIC18F23K22单片机[15]。该条施机控制系统硬件组成包括主控芯片PIC18F23K22单片机及复位模块。其中,程序烧写部分引脚固定不变,施肥量控制信号输入控制芯片的模数转换引脚,驱动步进电机的PWM控制信号与控制芯片的PWM引脚相连接,步进电机正反转控制端口电路,条施机行走测速的外部中断2 引脚。另外,还需要外接晶振接入相应引脚,以及其他指示或者要实现功能的I/O端口引脚。其硬件电路原理如图5所示。

图5 硬件电路设计原理图
3.1 步进排肥电机驱动控制电路
步进电机的控制电路部分主要是由步进电机与步进电机驱动器两部分组成。步进电机驱动器可以将控制器送来的PWM脉冲信号转换为步进电机转动角位移,PWM频率与电机转速成正比,所以通过PWM控制可以实现精确调速和精确定位。步进电机驱动电路如图6所示。

图6 步进排肥电机驱动电路图
DRV8886步进电机驱动器用两个全桥驱动控制两相步进电机,整步驱动已经能达到控制要求,故M1与M2两者都接地;此时电机步距角为1.8°,因未细分采用慢速衰减即DECAY脚接地,工作于这种模式可以得到更好的PWM与负载电流线性度;负载在PWM关闭时被短路,导致负载电流以最小速度衰减,步进电机发热小、无噪音。
DIR控制步进电机的转向,当引脚电平为高时为正转,电平变为低时则反转,STEP输入脉冲,其频率根据行走轮速度检测的霍尔传感器输入单片机的脉冲和施肥量设定来确定,从而控制步进排肥电机的转速及条施机的排肥量。nFAULT当电流过低或过高时,自动变为低电平,从而给操作者提示,直接接一个I/O口即可。nSLEEP和ENABLE均单片机I/O后输入高电平使驱动器工作。
3.2 行走轮速度检测电路
在条施机行走轮轮毂边缘固定安装霍尔传感器,并在传感器的正对轮毂上均匀安装多个永磁铁,在轮毂转动过程中,传感器在永磁铁磁场的作用下输出多个脉冲信号,且频率越高,转速越高。转速检测电路图如图7所示。
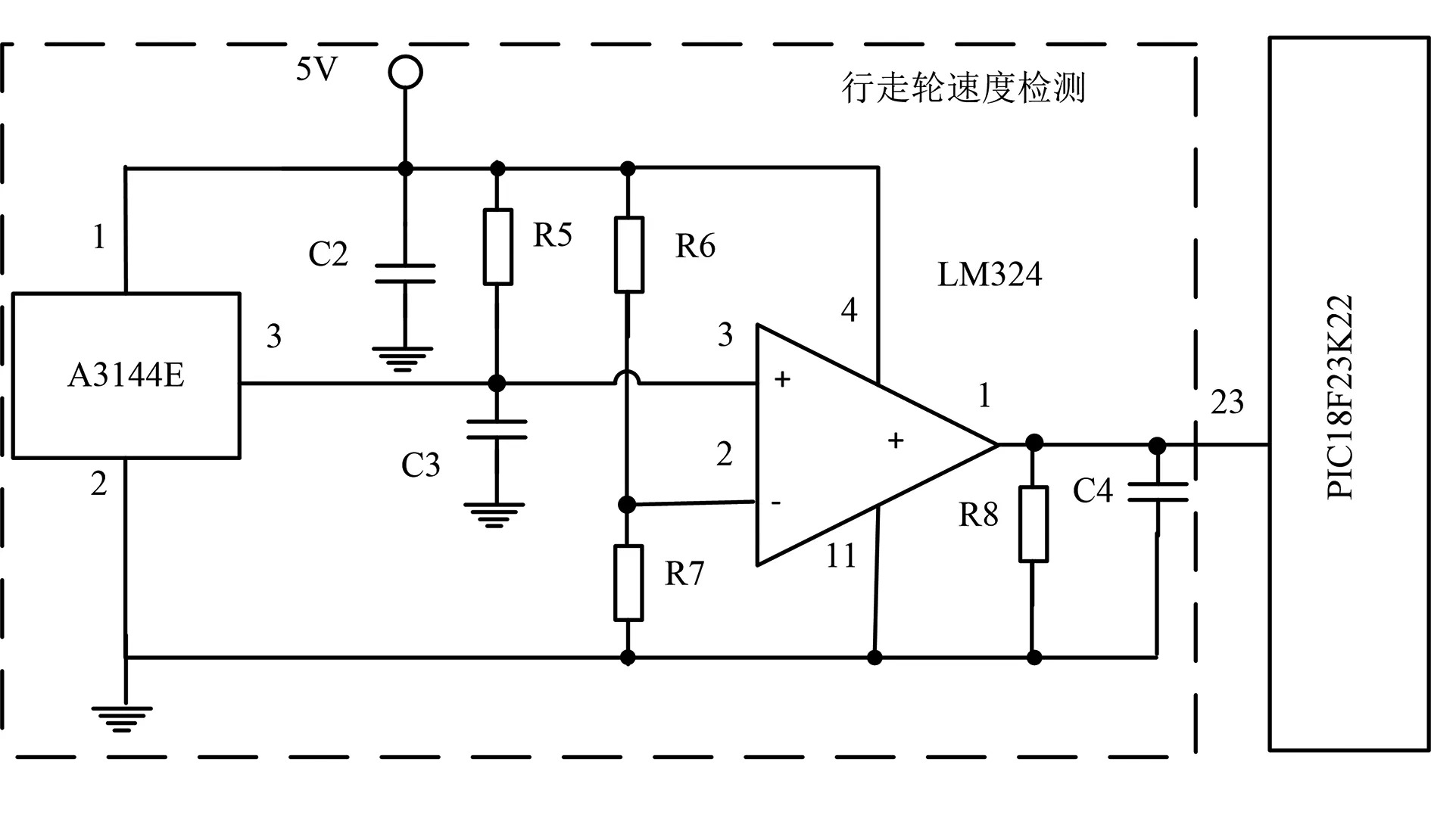
图7 转速检测电路
检测轮速的霍尔传感器(A3144E)产生的脉冲信号经过比较器后得出的矩形波信号输入到控制芯片,控制芯片根据行走轮半径计算出条施机行走速度。电压比较器由LM324及其他电路构成,当比较器的正向输入端电压高于比较器的反向输入端电平时,输出高电平,反之则输出低电平;另外,还具有整形作用,保证霍尔传感器与控制芯片之间信号良好的传递,提高控制系统的精确性和稳定性。同时,霍尔传感器的供电电源及输出也都并联了滤波电容,滤除尖峰干扰保证传感器提高霍尔传感器的工作稳定性。
4 田间试验
为了测试该电动助力式螺旋条施机的工作性能和控制性能,6月在重庆西南大学工程技术学院试验田里进行了田间试验[16]。试验前,先根据当地标准作业行距为1.15m,计算出单位长度的施肥量,手动设置好每667m2的施肥量,分别设置每公顷地施肥量为300、450、600、750kg,用电子秤称量适量的颗粒复合肥放入肥箱,然后操作者打开工作开关,手扶操作把手推着该条施机样机进行施肥。用皮尺测量施肥距离,每隔10m测量一次施肥量,施肥量由作业前后肥箱里肥料的质量差测出,理论计算得每10m对应的施肥量分别为345、517.5、690、862.5g。田间试验数据如表1所示。
式中γ—施肥量偏差;
Wq—试验前料箱中肥料重量(kg);
Wh—试验后料箱中肥料重量(kg);
L—施肥作业长度(m);
F—给定施肥量(kg/m)。
根据施肥量与作业距离计算出单位长度的实际施肥量,用施肥量设置旋钮的值与单位长度的实际排肥量相比较,得出施肥机的田间作业精度。

表1 田间试验数据表
由表1可以看出:在施肥量为300~750kg/hm2的范围内,该条施机机控制系统的最大偏差为7.05%,满足设计要求,可以实现精确定量施肥。但在田间作业中实际施肥量与理论之间还存在误差,原因有:行走速度不在合理速度范围;田间试验的数据测量误差;电机特性在不同负载下的误差;排肥器的排肥稳定性误差及其他误差。
5 结论
1)设计了一种电动助力式螺旋条施机,包括电动助力机构、竖直螺旋排肥机构、行走轮速度检测装置和控制系统4部分。控制系统根据霍尔传感器抗干扰电路处理后检测的行走轮速度,结合当前设置施肥量控制步进排肥电机的转速,从而达到精量施肥的目的。
2)试验表明:设置施肥量一定时,电动助力式螺旋条施机的排肥量与行走距离成线性关系。该条施机可降低劳动强度,提高施肥效率,为精量施肥机的设计提供了参考,并且提高了农业机械的机电一体化程度。
