高动态Ku/Ka双天线民航动中通系统设计
2019-05-27崔向宇郗小鹏2
崔向宇,郗小鹏2,张 勇
(1.天津航天中为数据系统科技有限公司,天津 300301;2.航天恒星科技有限公司(503所),北京 100086)
0 引言
随着用户对航空上网需求的不断增加、航空接入互联网将成为航空公司未来品牌和服务竞争重点。而动中通由于不受地域和时域的限制,卫星覆盖范围广、通信距离远、移动中可快速建立通信[1],因此受到航空公司的高度重视。我国Ku频段卫星通信技术已经十分娴熟,Ka频段卫星通信技术目前还处于试验阶段,还未大规模商用。因此在很长一段时期内将存在多种频段共同服务的现象[2]。
为适应国际航线不同地域不同卫星有效全向辐射功率(effective isotropic radiated power,EIRP)值的变化和提高现有卫星通信抗干扰能力,根据实际需求开展了Ku/Ka双频、双天线民航动中通的样机研制工作。通过一个方位转台根据最佳带宽服务需求,实现Ku/Ka天线快速对星与切换,保证卫星通信链路畅通,为航空用户提供高速上网体验。
近年来,全球智能手机保有量持续猛增,为进一步满足用户对航空上网的需求,欧、美和亚洲十几家航空公司均有民航飞机安装了动中通设备,为客舱提供带宽通信服务,解决飞行中信息孤岛问题。法国THALES、美国VIASAT公司在商用航空领域已开展机载卫星互联网通信的试航测试及试运行工作。比较典型的案例是美国VIASAT公司在2014年成功完成机载网络在Ku和Ka波段商业卫星之间的切换演示[2],飞行过程中在6颗卫星和3个Ku和Ka卫星转发器之间进行通信切换,演示了空中通信最先进带宽技术。而国内由于Ka天线研制难度缓慢,目前只有电子科技集团54所、星展测控、航天恒星等单位逐步开展Ka机载卫通的研制工作,并逐步在国内各行业进行推广[3]。
1 系统结构及原理
本文分析了目前民航动中通设计要求以及关键技术,设计了一种以机载惯导和信标接收机相结合的方案。伺服机构采用方位-俯仰型结构形式,Ku、Ka天线对称分布于两侧,1个方位电机和2个俯仰电机分别通过齿轮传动完成天线两个自由度的转动,并通过各自的同步传动轴带动相应的编码器转动,将机构方位轴和俯仰轴的角位置信息发送至伺服控制器,采用闭环控制算法提高系统的快速响应能力。
方位、俯仰采用齿轮传动,齿轮传动具有传动平稳、传动比精确、工作可靠、效率高等优点。整个传动链可以实现高转矩、低回差和较高的定位精度;Ku、Ka天线重量配比均衡,保证方位转动惯量在方位轴心。
Ku/Ka双频、双天线民航动中通系统组成如图1所示。
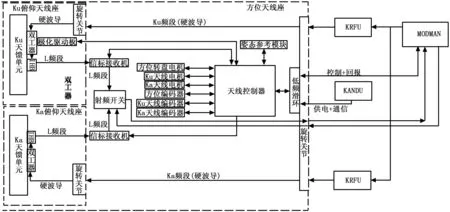
图1 双天线民航动中通系统组成框图
从图中可以看出,双频、双天线民航动中通系统主要由天线子系统和模块管理器(module manager,ModMan)组成。天线子系统包含外部天线单元(outside antenna equipment,OAE)、Ku/Ka天线控制单元(Ku/Ka-band aircraft networking data unit,KANDU)、Ku/Ka射频单元(Ku/Ka-band radio frequency unit,KRFU)等三个部件;KANDU由伺服控制器,方位电机、方位编码器,Ka俯仰电机、俯仰编码器,Ku俯仰电机、俯仰编码器,姿态参考模块等组成;ModMan与动中通采用OpenAM协议进行通信。
本系统的主要功能为通过机载惯性和位置传感器构建姿态测量单元,根据陀螺稳定控制技术构建陀螺稳定平台,隔离飞机运行过程中扰动对天线指向的影响。同时结合GPS数据和信标接收机接收的信标电平大小,采用极值跟踪算法控制天线始终指向目标卫星,使得天线指向不受飞机扰动的影响,保证通信链路稳定。
2 系统硬件设计
2.1 关键技术
民航动中通的核心问题主要有以下两点:一是要克服飞机扰动对天线指向的影响,使得天线能够快速捕获并跟踪目标卫星[4];二是出现链路中断时,能够通过有效的控制方法快速恢复通信链路。因此,要求系统具有较高的动态性能和较高的跟踪精度。
本系统涉及的关键技术主要有以下几点。
2.1.1 尺寸轻量化
为满足民航动中通轻量化技术特点[5],Ku、Ka天线采用剖面低、增益高、轻量化,具有空间波束合成技术的平板相控阵天线面[6],保证系统具有低旁瓣、较高交叉极化隔离度和较小的3dB波束宽带中心偏差。结构框架采用优质铝合金板加工而成,在满足强度和刚度要求的前提下,采取轻量化设计,可以有效降低设备重量。
2.1.2 高精度伺服控制技术
采用机载惯导信息经过惯性空间解耦技术获得卫星精确指向角度,结合惯性稳定技术及先进滤波算法提高输出数据的精度和稳定度。在控制环路中设计电流环、速度环和位置环的三环控制策略,采用复合控制算法提高系统的精度和动态响应能力。同时,结合精密结构与机构设计技术,进一步提高伺服系统的控制精度。
2.1.3 快速卫星切换技术
民航动中通采用机载惯导、全球定位系统(global positioning system,GPS)和信标极值跟踪技术相融合的工作方式,飞行中根据机载计算机指令可快速完成Ku、Ka天线对星及卫星切换;即可工作于同一颗卫星上的Ka或Ku转发器,也可工作于不同卫星上的Ka或Ku转发器。借鉴移动蜂窝通新概念,当卫星覆盖扩展到新的领域时,以最佳带宽服务理念,无缝的卫星网络切换技术让用户以相似的方式受益,提供多层次服务,保障链路通畅,提高系统动态响应及可靠性。
2.1.4 高动态跟踪技术
采用程序指向+动态跟踪技术,即伺服控制系统根据飞机惯导、星位信息计算天线指向,并叠加步进跟踪技术保证天线精准跟踪卫星[7],同时采用基于信标值、天线空间姿态的卡尔曼融合滤波算法的陀螺稳定移补偿技术保证动中通稳定系统具备低漂移性和高精度指向的能力,克服陀螺漂移造成的指向误差。从通信精度上来优化伺服控制系统,特别是对陀螺稳定系统的优化,避免扰动带来的影响。在实际应用中满足跟踪精度要求,具有较强的可行性。
2.2 系统硬件设计
本系统以数字信号处理器(digital signal processing,DSP)为核心,构建高可靠性伺服控制系统。选用直流伺服电机作为驱动元件,光电编码器作为位置和速度反馈元件实现电机的闭环控制。同时利用机载惯导获得载体姿态信息,融合姿态参考模块、GPS和信标接收机信息,完成对卫星的稳定跟踪。伺服控制器原理框图如图2所示。
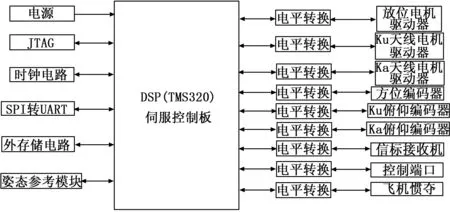
图2 伺服控制器原理框图
从图中可以看出,DSP作为伺服控制器的核心,接收机载惯导及姿态参考模块数据并对其进行滤波、数据融合和姿态解算,构建姿态测量单元和陀螺稳定平台。同时采用程序指向+动态跟踪控制策略,完成Ku或Ka天线的精确指向与卫星跟踪。
2.3 电磁兼容性设计
由于民航动中通工作电磁环境较为恶劣,结合RTCADO-160G等相关航空电气电子设备电磁兼容测试标准,系统在正向设计阶段从电磁干扰(Electro Magnetic Interference,EMI)及电磁耐受性(Electro Magnetic Susceptibility,EMS)方面进行了综合考虑。为了适应飞机上复杂电磁兼容环境,民航动中通在器件选型、接地、屏蔽、滤波、瞬态骚扰抑制等正向设计阶段进行了严格把控。
为了减少飞机上电源浪涌及通信干扰对卫星通信天线电气设备的冲击影响,在系统电源、通信输入端口加装高可靠性电源滤波器及通信接口保护电路。电源滤波器选型需从阻抗特性、插入损耗及安装位置等方面进行充分考虑;通信接口需从静电防护、隔离、瞬态骚扰抑制等方面综合考虑。
民航动中通系统涉及射频、低频信号,针对不同信号需进行不同处理,使分布电容产生的干扰降低到最小[11]。具体处理措施如下:
1)射频信号:Ku/Ka信号在系统内通过波导和旋转关节传输,安装在伺服机构用于连接KRFU与天线;这些波导和关节连接处须留有密封槽严格密封、不留缝隙,保证驻波跳动、插损跳动、电压驻波比(voltage standing wave ratio,VSWR)、插入损耗(insertion loss,IL)等符合设计指标;高频头(low noise block,LNB)下变频L频段信号须需选用带屏蔽、低损、柔性、稳幅稳相射频线缆,降低对系统内的其他设备的影响。
2)低频信号:当地线长度不超过信号波长的λ/20时可采用单点接地否则采用多点接地。对于有回路的信号进行屏蔽双绞处理,且屏蔽层一定要接地。除此之外,在原理设计上使用差动方式,减少外界干扰对信号的影响。
3 系统软件设计
3.1 软件设计思路和编程方法
本系统工作时伺服控制器根据ModMan指令信息完成Ku或Ka天线对星及动态跟踪;以Ka对星过程为例进行介绍,Ku工作流程一样。捕获瞄准跟踪(acquisition pointing and tracking,APT)控制技术可分为程序指向及动态跟踪两种控制策略。主要内容如下。
1)程序指向策略:
已知同步轨道卫星经纬度信息及地面经纬度信息计算得到地理坐标系下天线方位A、俯仰E、极化Apol指向角如下所示:
(1)
式中,为地面天线和卫星的经度差,为地面天线的纬度。在利用上式求方位角时应注意,所求方位角为以正南方向为基准,在实际应用时还需要根据卫星和地面天线位置进行判断。
从地理坐标系变换到飞机坐标系的变换表达式如下:
[Dj]=MR*MF*MA*[DM]
(2)
式中,为目标在机体坐标系中的坐标矢量:
(3)
为目标在地理坐标系中的坐标矢量:
(4)
MR、MF、MA分别为根据飞机惯导提供的横滚、俯仰和方位姿态信息的3个变换矩阵;Aj、Ej分别为天线轴的方位、俯仰角[8]。
天线控制环路采用陀螺稳定控制技术弥补初始指向角度误差,保证惯性空间天线指向稳定。然后根据飞机惯导信息,通过坐标变换解算出载体坐标系中的方位角、俯仰角和极化角[9],分别使方位电机、俯仰电机和极化电机驱动天线转动到该角度。
2)动态跟踪策略:
由于姿态参考模块的测量误差,按照理论公式计算出的初始角度存在一定的误差,天线指向角度很难落在天线的波束角范围内对准卫星,因此还需采用一定的搜索算法。在完成天线的初始指向和精对准后,系统开启陀螺稳定模式,结合信标接收机输出的自动增益控制(automatic gain control,AGC)参考信息,采取步进跟踪控制策略,即可完成天线的动态对星跟踪[10]。当载体扰动出现时,伺服驱动天线快速运动,因此要求伺服系统具有较高的动态性能。
3.2 软件实现流程
系统上电后首先进行DSP初始化,初始化结束后系统自检,方位、俯仰、极化以最大速度、最大加速度扫过整个转动范围后回归零位。自检完成后通过机载惯导获取载体姿态信息,并等待机载计算机反馈目标卫星数据,如尚未收到新的指令,则默认跟踪上次通信的卫星。
机载计算机发送目标卫星信息后,伺服控制器根据接收到的机载惯导数据和卫星位置数据计算出天线指向角度,并驱动伺服电机带动Ku或Ka天线转动到相应位置,此时判断信标接收机的AGC值是否达到阈值门限。
当达到阈值门限后,切换到自跟踪模式。在自跟踪模式下,通过步进扫描算法实时驱动天线不断搜索信标最大值,期间保证链路通信正常不中断。当出现链路中断后,系统立刻切换到程序指向模式,利用机载惯导数据修正指向角度,并通过算法进行搜索,直至链路重新建立。
系统软件流程如图3所示。

图3 系统软件流程图
4 实验结果与分析
工程样机研制完成后为充分验证民航动中通性能,对样机行了地面跑车模拟测试及摇摆台试验,通过测试不同环境下动中通设备与固定站之间的通信质量,验证民航动中通的对星跟踪能力。跑车模拟测试系统如图4所示。

图4 跑车模拟测试系统图
行驶通信测试Ku天线选定中星10号卫星,Ka天线选取中星16号卫星。测试过程中时刻保持一个天线处于卫星跟踪状态,例如:Ku天线处于对星状态时切换至Ka天线对星。在不同运动状态下分别记录对星时间、信标接收强度变化和音视频通信效果等。实验结果如表1所示。

表1 行驶通信测试记录表
为充分验证系统可靠性,对民航动中通进行了室外摇摆台可靠性测试。根据调研民航飞机恶劣情况下最大摆幅可达7°~8°,频率1 Hz;根据此指标可以得出民航动中通方位、俯仰最大扰动速度可达50°/s,最大扰动加速度可达315°/s2;对跟踪和稳定环路带宽提出了更高要求。系统采用步进跟踪和信标极值搜索方案,跟踪精度可达0.22°有效值(root-mean-square,RMS);实验结果如表2所示。

表2 不同扰动下稳定精度测试记录表
切星测试包括:摇摆台摆幅8°、频率1 Hz摇摆情况下,Ku天线对星分别选取中星10、亚洲9、亚太7、亚太5号卫星,Ka天线对星选取中星16号卫星。切星测试目的在于验证Ku与Ka天线之间切换的快速性,测试动中通在高强度扰动过程中双天线动中通更换波束的能力。实验结果如表3所示。

表3 高强度扰动下双天线切星测试记录表
上述实验结果表明工程样机各项指标基本符合前期设计要求,基本满足民航卫星通信使用要求。样机虽完成了地面跑车、摇摆台试验等基础性功能验证,初步模拟飞机不同飞行状态下Ku/Ka双天线对星、切星功能测试。但地面跑车速度和外界环境与飞机实际飞行环境还有些差距,控制策略定型还需根据后期挂飞试验效果进行优化调整;系统可靠性还需进一步验证,距离工程应用还有一定距离。
5 结束语
本文分析了Ku/Ka双频、双天线民航动中通关键技术,设计了一种基于APT控制技术的高动态响应民航动中通系统。采用程序指向+动态跟踪控制策略,以最佳带宽服务理念,快速完成Ku、Ka天线之间的快速切换,为航空用户提供多层次服务,保障链路通畅。该系统已完成工程样机研制并进行了地面跑车模拟测试和摇摆台可靠性测试验证,各项指标基本符合设计要求,为后续产品推广奠定了基础。在空间信息应用与服务成为国家战略新兴产业的大背景下,借助我国移动互联网和通信产业发展优势,结合我国航空制造业积累的宝贵经验,坚信民航动中通必将拥有美好的明天。
