波浪下“蓝鲸”号起重船系泊吊装组块耦合运动响应
2019-05-25朱绍华1于文太1李广帅1季红叶骆寒冰
朱绍华1, 于文太1, 李广帅1, 季红叶, 谢 芃, 骆寒冰
(1.海洋石油工程股份有限公司,天津 300461; 2.天津大学 建筑工程学院,天津 300350)
0 引 言
在系泊起重船吊装海洋平台大型上部组块时,现场风、浪、流等海洋环境条件复杂。如果上部组块运动幅度较大,其将不能被正常安装到导管架上,影响现场施工进度。在严重情况下,剧烈的组块运动会威胁海洋平台结构物和现场施工人员的安全。随着需吊装的上部组块质量的逐渐提高,合理分析预报施工时吊物的运动响应,可有效指导现场安装作业,提高作业效率及安全性。开展波浪下系泊起重船与吊物的耦合运动研究具有重大的理论意义和工程应用价值。
近年来国内专家学者对起重船-吊物系统的耦合运动做了一定的研究工作。董艳秋等[1]研究起重船在波浪中作业时吊物系统的动力响应,建立在起吊过程中重物运动的非线性微分方程,采用新切片理论在频域内得到船体的运动,用Runge-Kutta方法在时域内求得重物在空间的动力响应和吊索的动张力。汪娟娟等[2]利用 MOSES 计算软件,分析船舶-吊物耦合系统的运动特性。通过改变起吊要素,分析这些要素对吊重运动和船体运动的影响,以及吊重摆动与船体横摇运动的相互影响。骆寒冰等[3]对在涌浪环境下船舶-吊物耦合运动进行数值模拟,并对波浪周期、吊高、浪向等主要因素进行敏感性分析,并提出降低吊装组块运动响应的建议措施。许鑫等[4]以一艘半潜式起重船为研究对象,分别用数值模拟和模型试验的方法研究其空钩和最大起重时在波浪作用下的运动性能。
波浪下系泊起重船吊装的耦合运动响应规律复杂,涉及船舶和吊物两个刚体以及系泊系统和吊缆等柔性体。探索系统的耦合机理并合理预报运动响应特性,具有一定的挑战性。本文依托东海实际吊装施工项目,采用水池模型试验和数值模拟方法,研究波浪下系泊起重船吊装耦合系统运动响应。
1 海上吊装施工项目介绍
本研究主要依托东海黄岩孔雀亭A/B组块项目。孔雀亭气田位于东海大陆架上,在上海市东南方向397 km处,属黄岩滚动开发项目中的平北黄岩油气田二期,海域水深80 m左右。孔雀亭WHPA组块重约3 300 t,WHPB组块重约2 600 t。采用系泊起重船吊装作业方式安装上部组块,现场作业船选用“蓝鲸”号起重船,最大起重能力为7 500 t,该项目于2016年5月-6月施工作业并顺利完成安装。
在海上吊装作业前,需根据吊物质量和海洋环境气象条件,选择合适的起重作业船,确定抛锚就位方案。在吊装施工时,对于有采气树的导管架平台,需保证组块井口区域与采气树之间具有足够的安装间隙。组块至少需吊至高于采气树顶部3 m的高度后实施套采气树操作,组块不能与采气树发生任何碰撞。最后,根据OWS气象预报和现场实际海况条件,选择在合适的气象窗口条件下进行吊装作业。
以“蓝鲸”号起重船吊装孔雀亭WHPB组块为例,吊装步骤为:(1)“蓝鲸”在安装位置北侧东西向上就位;(2)组块运输驳船靠“蓝鲸”左舷;(3)“蓝鲸”在吊机全回转工况下在舷侧起吊,运输驳船离开“蓝鲸”;(4)“蓝鲸”带组块向南绞船至安装位置;(5)组块套井口施工。在上述施工过程中:当组块从驳船上起吊运输时,组块重心的起吊高度距水面约25 m;在套井口安装状态下,组块重心的起吊高度距水面约48 m。25 m和48 m吊高分别是组块在吊装安装过程中的最低和最高典型高度。
2 水池模型试验
2.1 模型参数及工况介绍
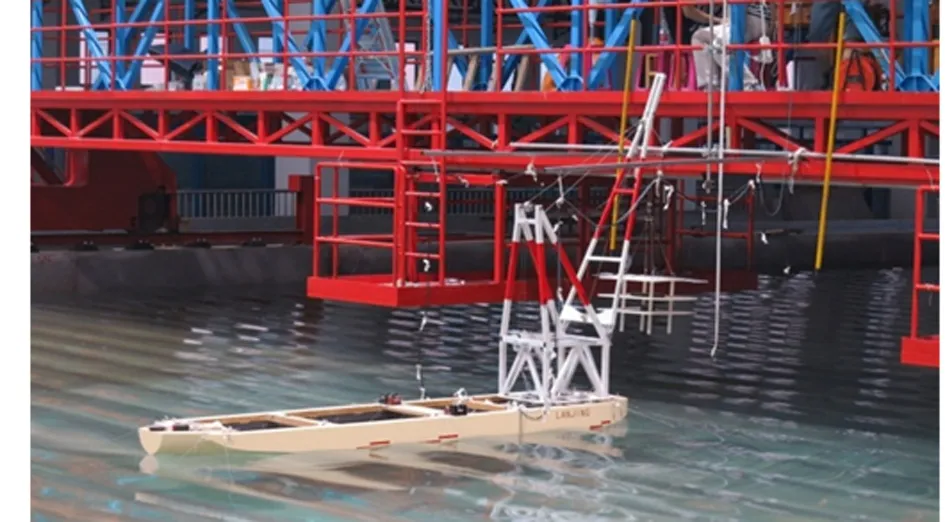
图1 系泊起重船吊装试验模型
模型试验于天津大学港口与海洋工程试验水池进行,水池的长、宽、深尺寸分别为55.0 m、40.0 m、1.8 m,造波区域宽度为24.0 m。模型缩尺比选择1∶60,试验水深为1.33 m,模拟东海80 m水深。试验测试船舶和组块的6个自由度运动、波浪波高、锚缆系泊力等参数,采样频率取50 Hz。运动响应测试采用加拿大NDI Optotrak Certus 三维动态非接触光学测量系统,最高精度可达0.1 mm,分辨率为0.01 mm(光学镜头距被测物2.25 m时)。系泊拉力采用威思特公司的VS16微小型拉力传感器,量程为2 kg,精度为2 g。船舶模型采用玻璃钢材质加工制作,上部组块采用塑料制作,模型对吊机系统作了相应简化。试验模型如图1所示。起重船及组块的基本参数如表1所示,其中纵坐标指向艉为正。

表1 “蓝鲸”号起重船及其模型基本参数
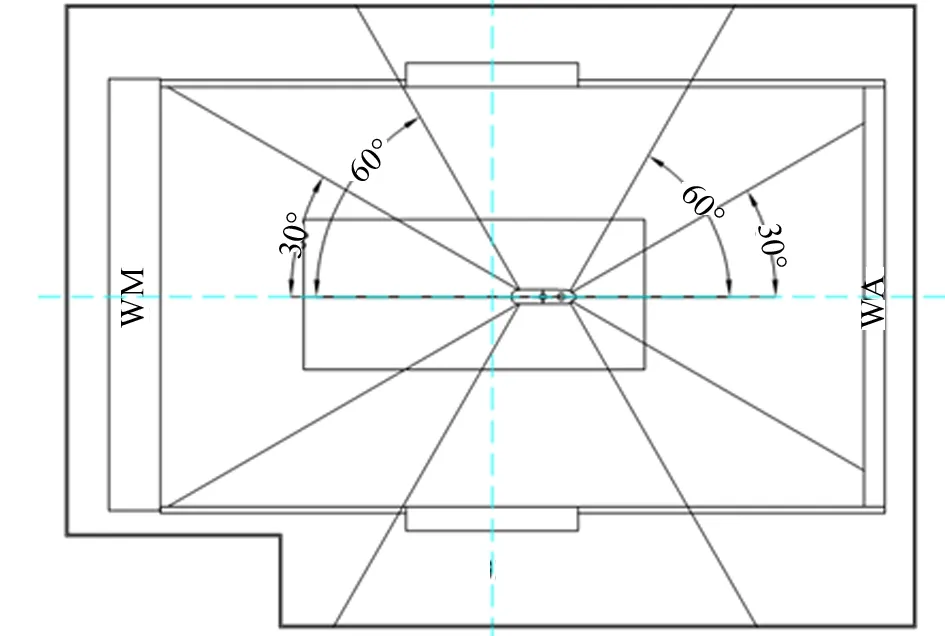
图2 水池模型试验系泊布置
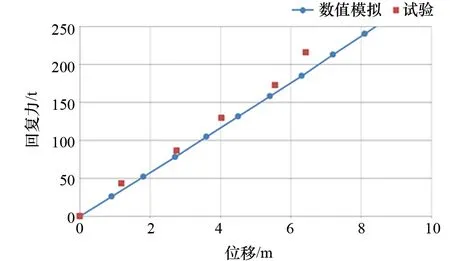
图3 系泊系统刚度位移曲线对比
模型试验系泊系统选取30°/60°对称系泊布置方案,共8根缆绳,每根缆绳的实船长度不小于1 000 m。模型试验系泊系统布置如图2所示。水池左侧布置造波机(图中标示“WM”),右侧布置消波器(图中标示“WA”)。在模型试验中,针对不同浪向、波高、周期、组块吊物高度、系泊预张力等参数,开展规则波试验,研究不同参数组合对耦合运动响应的影响。
2.2 系泊系统刚度位移曲线
对模型系泊系统进行总体刚度位移曲线测试,得到纵向位移刚度曲线。将试验结果与MOSES软件数值模拟结果进行对比,如图3所示。所有数值都已转化为实船尺度。结果表明两者吻合较好。
2.3 静水中自由衰减试验
在正式试验前进行静水中的自由衰减运动测试。通过对自由衰减运动结果进行统计,得到船舶各方向运动的固有周期和阻尼因数,为后期数值模拟的修正提供依据。为了研究吊物的运动特性,模型试验还进行吊物的自由衰减运动测试,测得吊物摆动固有周期为17.4 s。
3 数值分析方法及其模拟模型
3.1 系泊系统运动响应分析方法
根据初始系泊缆预张力、风力、流力、一阶波浪力、二阶波浪力确定船舶初始浮态、位置,求解船舶在时域中的运动方程为
(1)

对于系泊在水中的海洋结构物:在规则波中除了产生与波浪频率一致的高频振动外,还会发生偏离平衡位置的位移;在不规则波中发生长周期的漂移运动,这一运动的周期长、频率低,被称为低频慢漂运动。这些现象说明,作用在海洋结构物上的波浪力有波频下的波浪力和二阶力,而二阶力包括定常的漂移力(也称平均波浪力)和低频的缓变漂移力(也称慢漂力)。二阶力计算方法包括二阶传递函数方法和Newman近似法。Newman近似法无需计算二阶速度势,计算效率较高,精度满足工程需要[5]。MOSES水动力软件采用Newman近似法分析二阶力。
3.2 数值模拟模型
选用商业软件MOSES进行数值模拟。起重船及吊物系统模型如图4所示,起重船的系泊系统布置如图5所示,起重船水动力网格模型如图6所示。为提高数值模拟结果的合理性和精确性,根据模型试验得到的无量纲阻尼系数对MOSES计算的阻尼矩阵进行修正[6]。

图4 起重船及吊物系统数值模拟 图5 数值模拟系泊系统布置图 图6 起重船计算网格模型图
4 典型工况结果对比分析
对起重船在空钩状态以及有吊物状态下的规则波测试结果进行讨论,并与数值模拟结果进行对比分析。其中:吊物重3 000 t,吊物重心距水面高度为48 m,预张力为50 t,顶浪浪向,波浪周期为5~22 s,波高为1.5 m。

4.1 “蓝鲸”号起重船无吊物运动分析
图7分别为系泊船舶在无吊物状态下纵荡运动、升沉运动和纵摇运动的模型试验和数值模拟对比结果,可以看出,3个自由度的结果吻合较好。其中,数值模拟采用模型试验所测得的无量纲阻尼系数,根据试验结果所测得的无量纲阻尼系数应用与数值模拟结果较为准确。
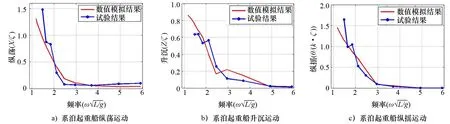
图7 系泊起重船无吊物运动规则波结果对比
4.2 “蓝鲸”号起重船吊装组块耦合运动分析
图8分别为规则波情况下系泊船舶在有吊物工况下纵荡、升沉、纵摇运动和吊物纵荡、升沉运动结果。对比结果可知:
(1) 起重船3个自由度运动、吊物2个自由度运动的数值模拟与模型试验结果吻合较好。
(2) 吊物纵荡运动曲线出现1个峰,换算成实船周期约18 s,该周期与吊物自身自由摆动周期接近,说明在波浪周期接近吊物固有运动周期时,会引起吊物的共振运动。
(3) 数值模拟得到的吊物纵荡运动与模型试验结果对比,出现峰值的周期一致,但是数值模拟的共振点运动幅值偏大。这是由于在模型试验时在吊物运动过程中存在吊缆与滑轮组等造成的阻尼,而在数值模拟时,MOSES软件无法对吊物施加阻尼参数。
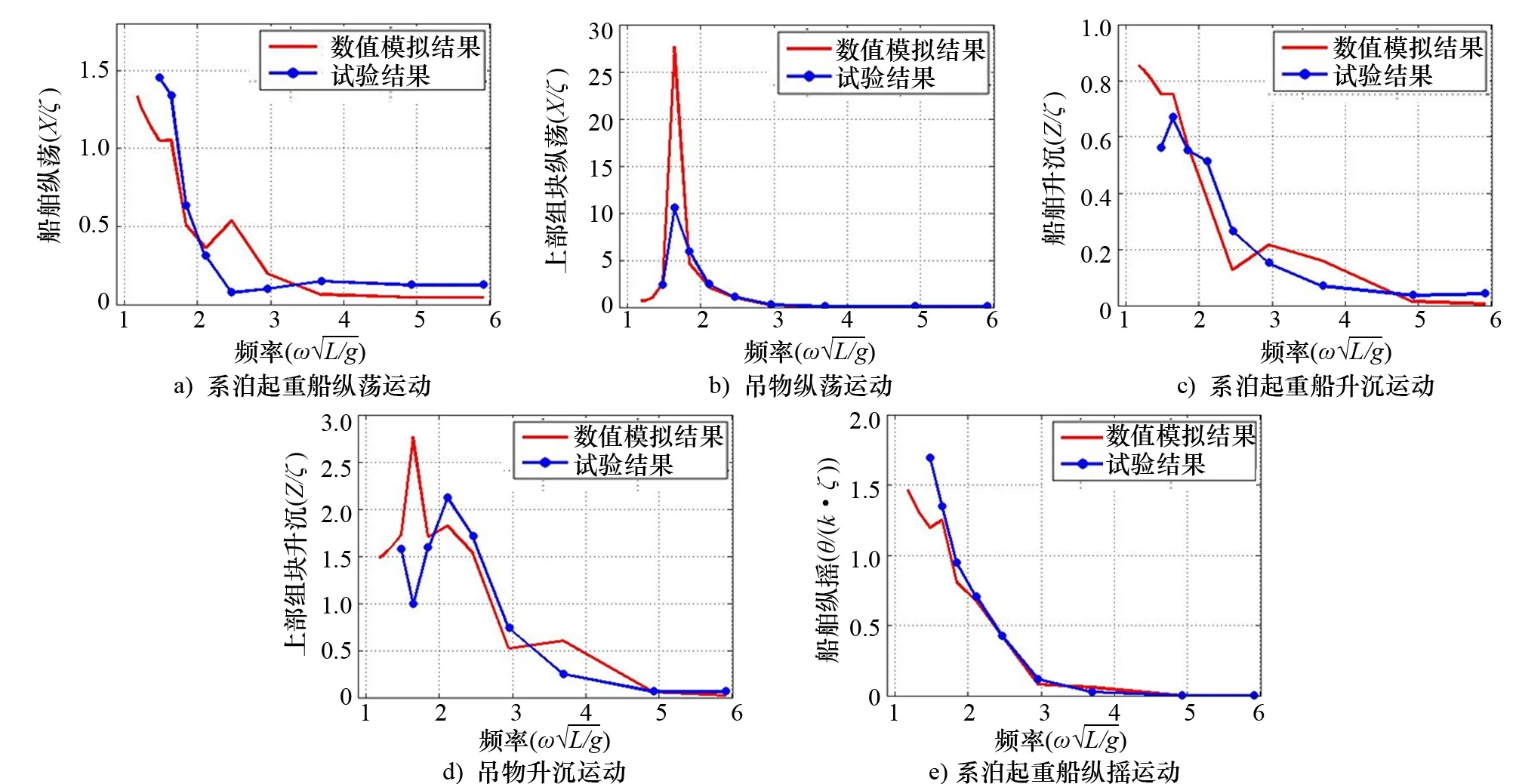
图8 系泊起重船有吊物耦合运动规则波结果对比
5 结 论
针对波浪中系泊“蓝鲸”号起重船吊装组块耦合运动问题,采用模型试验和数值模拟方法,研究了耦合运动的特性及其机理。选择顶浪规则波下运动响应结果,对比分析后得到如下结论:
(1) 在顶浪规则波中,对于起重船的纵荡、升沉和纵摇运动以及吊物纵荡、升沉运动,模型试验与数值分析结果均吻合较好。
(2) 当顶浪波浪周期接近吊物摆动固有周期时,模型试验和数值分析结果表明,吊物纵荡运动出现共振,在共振周期方面,两者吻合较好。不过,数值模拟的共振点运动幅值偏大,可能是由于阻尼原因。
本文研究揭示了波浪中系泊起重船吊装组块耦合运动机理。下一步将继续对比数值模拟和模型试验结果,提高数值模拟的精度,深入讨论各个参数对耦合运动响应的影响程度,包括浪向、吊重、系泊预张力、吊高等,为海洋平台吊装施工作业提供技术支持。
