基于高精度差分定位的无人机系统研究
2019-05-24李庭威王峰黄祖德夏佩龙保任
李庭威 王峰 黄祖德 夏佩 龙保任
摘要:RTK实时动态差分技术采用了载波相位动态实时差分方法,基于实时处理两个观测站点的载波相位,能够实时监测出观测点的三维坐标,可以做到厘米级别的高精度。设计基于RTK技术的基站,将RTK技术与无人机相结合,可以实现无人机的高精度飞行。
关键词:载波相位差分技术;基站;python服务器;无人机;飞控
中图分类号:TP393 文献标识码:A
文章编号:1009-3044(2019)07-0258-03
Abstract:Based on the real-time processing of the carrier phase of two stations, real - time kinematic technology can provide the three-dimensional coordinates of the observation point in real time and reach the centimeter level of high precision. Based on the RTK technology design of the base station, the RTK technology and unmanned aerial vehicles combine to achieve high-precision UAV flight.
Key words: Real Time Kinematic;Base station;python server;UAV;flight control
1 引言
GPS(Global Position System)全球定位系统具有全球范围覆盖、全天候、高精度的特点,已经广泛应用于世界的各行各业。在GPS差分系统中,将GPS信号接收机安装在已知坐标位置点上,并作为基准站接收机,基准站接收机接收到GPS卫星信号后,计算出差分矫正量,并将此差分矫正量发送给在此基准站服务范围内的用户(也叫作流动站)接收机,提高用户接收机的定位精度。根据差分方式的不同,差分GPS可以分为基于位置的差分、基于伪距的差分、载波相位经过平滑后的伪距差分和基于载波相位的差分四种。基于载波相位的差分系统往往能够达到最高的定位精度,最高能达到毫米级,可以用来实现精密定位。无人机(UAV)是利用无线设备以及自带的程序进行控制操纵的不载人的飞机。在危险环境中或者执行危险任务时,相较于载人飞机,无人机优势明显。传统的无人机使用GPS单点定位,定位精度在10m左右,远远达不到高精度作业的精度要求。而将载波相位差分技术应用到无人机上,则可以提高无人机的定位精度,对于无人机在旅游、导航、比赛、表演方面有很大的现实意义。
2 载波相位差分技术
GPS接收机如要实现定位,必须要解决两个问题:一是要获得可见卫星在空间坐标系中的准确位置,二是要测得各颗可见卫星到接收机的距离。由于在传播过程中,电磁波会受到电离层、大气层的干扰,所以这个距离会和真实的距离有些偏差,称为伪距。GPS信号中含有各种定位信息,不同类型的接收机提供的观测量会有所不同,载波相位测量是其中的一个基本观测量。
载波相位差分定位技术首先需要在基准站上安装一台GPS信号接收机,对卫星进行持续不断的观测,并使用无线电实时地将观测得到的数据和基准站的位置坐标信息发送给流动站;流动站一边接收卫星信号,一边通过无线电接收基准站的信息,根据载波相位差分相对定位原理实时处理数据,并以厘米级别的精度计算出流动站的三维坐标。载波相位差可以分有单差、双差以及三差三种模型。这里介绍常用的单差和双差模型。
3 搭建基站和无人机平台
3.1 搭建基准站服务器
基站部分主要由GPS模块、中央处理单元、电源和天线等组成。传统的诺瓦泰基站性能好,但价格昂贵,且重量较大,移动不方便,所以本项目的GPS模块部分选用ublox导航芯片。u-blox芯片是瑞士U- blox公司研发的一款芯片,体积小,功耗低,性能出色。稳定的电源是系统能够正常工作的前提,电源设计应考虑功率、抗干扰性能、电平等基本问题。选用AMS1117三端稳压电源,其芯片内部具有过热保护和限流电路,保证了芯片和电源系统的稳定。天线部分选用右旋极化陶瓷介质天线,主要组成比分还有低噪声信号模块、接头、线缆。这种天线的信号接收能力取决于陶瓷的分配,低噪声信号模块也叫LNA,能够将信号进行放大并同时进行滤波处理。
Python是一门面向对象的直译式的程序语言。它拥有了一组功能强大的标准库,能够轻松完成许多常规的任务。Twisted是用Python實现的基于事件驱动的网络引擎框架。在基于树莓派的Linux系统上,选用python Twisted框架,能快速搭建支持多进程并发的差分服务器。
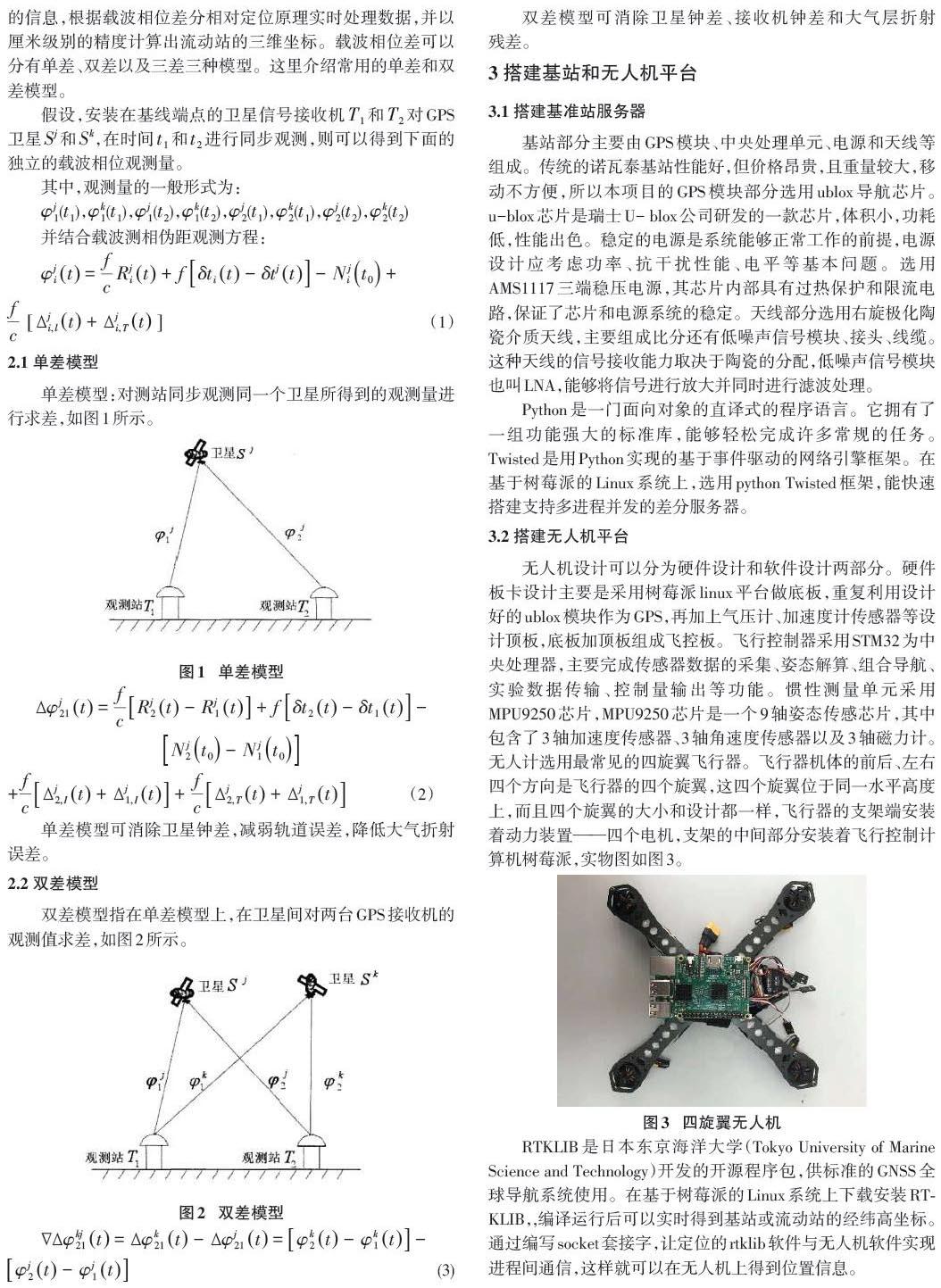
3.2 搭建无人机平台
无人机设计可以分为硬件设计和软件设计两部分。硬件板卡设计主要是采用树莓派linux平台做底板,重复利用设计好的ublox模块作为GPS,再加上气压计、加速度计传感器等设计顶板,底板加顶板组成飞控板。飞行控制器采用STM32为中央处理器,主要完成传感器数据的采集、姿态解算、组合导航、实验数据传输、控制量输出等功能。惯性测量单元采用MPU9250芯片,MPU9250芯片是一个9轴姿态传感芯片,其中包含了3轴加速度传感器、3轴角速度传感器以及3轴磁力计。无人计选用最常见的四旋翼飞行器。飞行器机体的前后、左右四个方向是飞行器的四个旋翼,这四个旋翼位于同一水平高度上,而且四个旋翼的大小和设计都一样,飞行器的支架端安装着动力装置——四个电机,支架的中间部分安装着飞行控制计算机树莓派,实物图如图3。
RTKLIB是日本东京海洋大学(Tokyo University of Marine Science and Technology)开发的开源程序包,供标准的GNSS全球导航系统使用。在基于树莓派的Linux系统上下载安装RTKLIB,,编译运行后可以实时得到基站或流动站的经纬高坐标。通过编写socket套接字,让定位的rtklib软件与无人机软件实现进程间通信,这样就可以在无人机上得到位置信息。
图4是基站服务器系统与无人机差分系统结合的基本框架。基准站系统对卫星进行连续观测,并通过4G模块实时地将观测得到的数据和基站坐标信息发送给无人机差分系统;无人机差分系统一边接收卫星信号,一边通过4G接收模块接收基准站信息,根据载波相位差分相对定位原理实时处理数据并以厘米级的精度计算出无人机的三维坐标,根据Mavlink无人机控制协议通过数传电台将坐标传给地面站,并实时显示在电脑上。
图5左边部分是单点定位的精度效果,右边部分是使用基站后差分定位的精度效果。可以看到,在未使用差分技术前,在不同时刻定位出来的点比较分散,离实际位置较远。图中一格代表2米,单点定位精度大概在10米左右。使用载波相位差分技术后,不同时刻的定位结果非常集中,都在离实际位置非常近的地方,定位精度达到分米级。
在无人机起飞前,还需要在电脑上安装Mission Planner软件。Mission Planner是无人机地面控制站软件,适用于固定翼,旋翼机和地面车,仅仅在windows系统下工作。Mission Planner可给无人机提供配置工具或动力学控制,完成遥控校准、加速度校准和罗盘校准。在完成各类参数的设定后,组装飞机,完成各类安全检查后试飞。
4 结束语
本论文分析了载波相位差分技术,设计了基于ublox的基准站,并重复利用该基站搭建无人机平台。此外,还设计了无人机硬件,使用APM飞控软件,调节PID参数。将载波相位差分技术与无人机技术相结合,具有较大的现实意义。
参考文献:
[1] 谢钢.全球导航卫星系统原理[M].北京:电子工业出版社,2013.
[2] 劉天雄.差分GPS系统有什么作用?(上)[J].卫星与网,2012.
[3] 党亚民,秘金钟,等.全球导航卫星系统原理与应用[M].北京:测绘出版社,2007.
[4] 庞宇.GPS载波相位相对定位技术的研究[D].阜新:辽宁工程技术大学,2011.
[5] 高须知二.GNSS Precise Positioning with with RTKLIB[R].东京:东京海洋大学,2011.
[6] 丘恩(美).Python核心编程[M].北京:人民邮电出版社,2008.
[7] 董健康,安东.自适应卡尔曼滤波在组合导航中的应用研究[J].计算机技术与发展,2011.
[8] 谭健豪,王耀南,王媛媛,等.旋翼飞行机器人研究进展[J].控制理论与应用,2015.
[9] 赵建华.无人机地面站数据可视化与视景仿真技术研究[D].电子科技大学,2012.
[10] 张增圻.智能控制理论与技术[M].北京:清华大学出版社,2011.
【通联编辑:代影】
