基于宏观基本图的城市拥堵区域优化研究
2019-05-24秦山根
秦山根
摘 要:为了解决交通高峰时段城市部分区域因需求过大而导致拥堵且通行效率低下问题,设计了基于不同拥堵程度的子区域宏观基本图(Macroscopic fundamental diagram MFD),建立拥堵区域优化控制模型,利用模型预测(Model Predictive Control MPC)方法获得最优解。根据谱聚类方法将路网划分为拥堵与非拥堵区域,获得清晰的MFD曲线,在此基础上建立优化模型,并用遗传算法对处理过的目标函数进行求解。仿真实验结果表明,在该模型的作用下,拥堵区域的拥堵情况得到明显改善,区域通行能力得到了优化。
关键词:宏观基本图;模型预测;交通拥堵
DOI:10. 11907/rjdk. 182388
中图分类号:TP319 文献标识码:A 文章编号:1672-7800(2019)005-0158-04
Abstract: In order to solve the problem of congestion and low efficiency due to excessive demand in some areas of the city during traffic peak hours, a macroscopic fundamental diagram (MFD) of sub-areas based on different congestion levels is designed to establish an optimal control model for congested areas. This problem is solved by model predictive control(MPC). According to the spectral clustering method, the road network is divided into congested and non-congested areas, and a clear MFD curve is obtained. Based on this, an optimization model is established, and the processed target function is solved by genetic algorithm. The simulation results show that under the action of the model, the traffic volume of the road network in the congested area and the cumulative number of completed vehicles in the whole area are optimized.
Key Words: MFD; MPC; traffic congestion
0 引言
隨着社会的发展,私家车数量越来越多,城市交通拥堵问题越来越严重,部分区域早高峰和晚高峰时拥堵程度特别严重,但是外围区域情况良好,调控城市特定区域的拥堵问题倍受关注。
传统的区域交通控制系统如SCOOT、SCART等[1-2]很难解决饱和交通状态下的路网交通控制问题,更加复杂的系统如OPAC[3]、RHODES[4]等无法围绕某一个核心拥堵区域进行宏观控制。城市交通拥堵都是区域性的,对于路网中的每个交叉口以及车流进行动态建模很难。与这种微观路网建模相反,宏观基本图(MFD)则可很好地对区域网络进行建模。Daganzo[5]提出了MFD模型,通过实验数据证明了交通流参数之间的关系和MFD的基本特性,MFD成为交通控制领域一个重要理论。文献[6]将微观的交通流与MFD进行整合,用来限制控制策略的搜索空间,发挥了各自的优势。文献[7]提出迭代学习策略,使路段平均占有率收敛到合理值。Keyvan-Ekba-tani等[8-9]基于MFD理论,提出了门限控制和鲁棒控制。这些控制方法均可有效缓解拥堵区内部的交通状况, 然而均未考虑拥堵区域外路网状态及边界控制对受控车辆的影响。
模型预测控制(MPC)具有滚动优化、反馈校正的优点,这种控制机制已经应用到交通控制的各个方面。文献[10]运用MPC给环形交叉口信号灯进行配时,通过合理分配资源避免了死锁。文献[11]避免采用总体时间花费最少作为优化目标导致的系统性能恶化,引入平均密度作为目标函数。文献[12]、[13]根据不同特性划分MFD子区,并提出最优边界控制方法。
本文提出一种基于宏观基本图(MFD)的城市拥堵区域协调控制策略。通过调控两子区之间的边界控制参数,缓解区域拥堵程度,提高路网整体通行效率,通过模型预测控制方法取得最优解。
1 相关工作
1.1 交通流宏观基本图
2.2 控制目标与多目标函数
假设MFD为路网的固有属性,边界控制不影响拥堵区域内外的MFD形式。
系统的控制目标为增大路网输出量,也就是使宏观路网的旅行车辆流量最大化。为了提高车辆运行效率,需要减少交叉口的延误时间,将路网各交叉口的平均延误时长作为优化目标。因此,可建立多目标函数评价路网的运行状态。
3 实验仿真
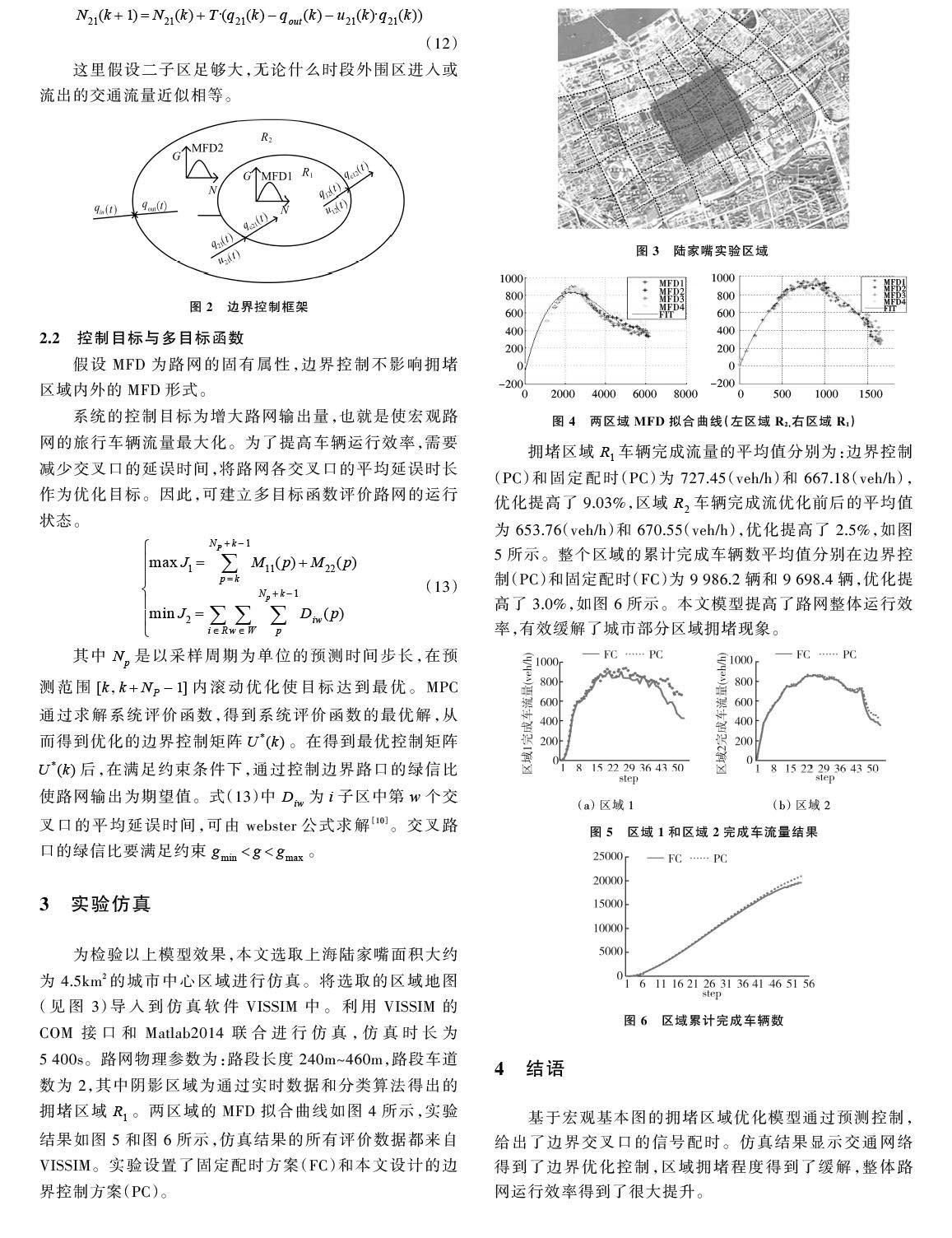
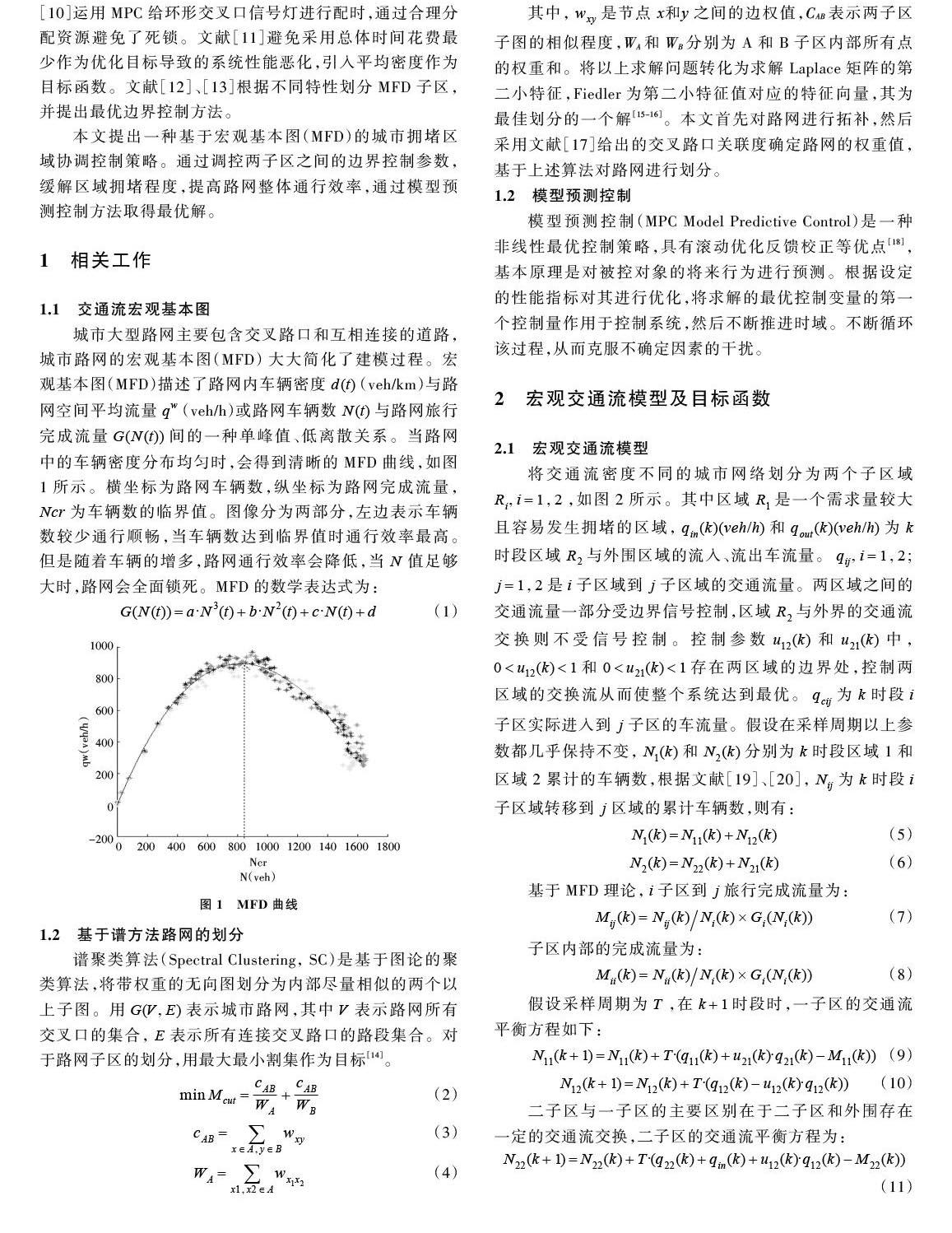
为检验以上模型效果,本文选取上海陆家嘴面积大约为4.5km2的城市中心区域进行仿真。将选取的区域地图(见图3)导入到仿真软件VISSIM中。利用VISSIM的COM接口和Matlab2014联合进行仿真,仿真时长为 5 400s。路网物理参数为:路段长度240m~460m,路段车道数为2,其中阴影区域为通过实时数据和分类算法得出的拥堵区域[R1]。两区域的MFD拟合曲线如图4所示,实验结果如图5和图6所示,仿真结果的所有评价数据都来自VISSIM。实验设置了固定配时方案(FC)和本文设计的边界控制方案(PC)。
拥堵区域[R1]车辆完成流量的平均值分别为:边界控制(PC)和固定配时(PC)为727.45(veh/h)和667.18(veh/h),优化提高了9.03%,區域[R2]车辆完成流优化前后的平均值为653.76(veh/h)和670.55(veh/h),优化提高了2.5%,如图5所示。整个区域的累计完成车辆数平均值分别在边界控制(PC)和固定配时(FC)为9 986.2辆和9 698.4辆,优化提高了3.0%,如图6所示。本文模型提高了路网整体运行效率,有效缓解了城市部分区域拥堵现象。
4 结语
基于宏观基本图的拥堵区域优化模型通过预测控制,给出了边界交叉口的信号配时。仿真结果显示交通网络得到了边界优化控制,区域拥堵程度得到了缓解,整体路网运行效率得到了很大提升。
参考文献:
[1] ROBERTSON D I,BRETHERTON R D.Optimizing networks of traffic signals in real time-the scoot method[J]. IEEE Transactions on Vehicular Technology, 1991, 40(1):11-15.
[2] ?OCHOWSKA R,CELI?SKI I,SOBOTA A,et al. Selected issues of a coordinated adaptive road traffic system application within the Silesian conurbation[C]. Transport Systems Telematics Conference,2010:364-373.
[3] GARTNER N H. Development and testing of a demand-responsive strategy for traffic signal control[C].American Control Conference. IEEE, 2009:578-583.
[4] MIRCHANDANI P,HEAD L. A real-time traffic signal control system: architecture, algorithms, and analysis[J]. Transportation Research Part C, 2001, 9(6):415-432.
[5] GEROLIMINIS N,DAGANZO C F. Existence of urban-scale macroscopic fundamental diagrams: some experimental findings[J]. Transportation Research Part B, 2008, 42(9):759-770.
[6] CHU T,WANG J. Traffic signal control with macroscopic fundamental diagrams[C]. American Control Conference. IEEE,2015:4380-4385.
[7] DING Y,JIN S,YIN C,et al. ILC based perimeter control for an urban traffic network[C]. International Conference on Control, Automation, Robotics and Vision. IEEE, 2017:1-6.
[8] KEYVAN-EKBATANI M,KOUVELAS A,PAPAMICHAIL I,et al. Exploiting the fundamental diagram of urban networks for feedback-based gating[J]. Transportation Research Part B,2012,46(10):1393-1403.
[9] HADDAD J,SHRAIBER A. Robust perimeter control design for an urban region[J]. Transportation Research Part B,2014(68):315-332.
[10] 叶宝林. 城市路网交通信号协调控制理论与方法研究[D]. 杭州:浙江大学, 2015.
[11] 丁宏飞,刘硕智,秦政. 基于模型预测控制的城市快速路交通协同控制[J]. 公路交通科技,2016,33(10):111-117.
[12] 丁恒,郭放,蒋程镔,等. 多个MFD子区边界协调控制方法[J]. 自动化学报,2017,43(4):548-559.
[13] SIRMATEL I I,GEROLIMINIS N. Model predictive control of large- scale urban networks via perimeter control and route guidance actuation[C]. IEEE Conference on Decision and Control,2016:6765-6770.
[14] 高琰,谷士文,唐琎,等. 机器学习中谱聚类方法的研究[J]. 计算机科学,2007,34(2):201-203.
[15] 李晓丹. 城市道路网络交通小区动态划分理论与方法研究[D]. 上海:同济大学,2009.
[16] 马莹莹,杨晓光,滢. 基于谱方法的城市交通信号控制网络小区划分方法[J]. 系统工程理论与实践,2010,30(12):2290-2296.
[17] 卢凯,徐建闽,李轶舜. 基于关联度分析的协调控制子区划分方法[J]. 华南理工大学学报:自然科学版,2009,37(7):6-9.
[18] 席裕庚,李德伟,林姝. 模型预测控制——现状与挑战[J]. 自动化学报,2013,39(3):222-236.
[19] GEROLIMINIS N,HADDAD J,RAMEZANI M. Optimal perimeter control for two urban regions with macroscopic fundamental diagrams: a model predictive approach[J]. IEEE Transactions on Intelligent Transportation Systems,2013,14(1):348-359.
[20] HADDAD J,GEROLIMINIS N. On the stability of traffic perimeter control in two-region urban cities[J]. Transportation Research Part B, 2012, 46(9):1159-1176.
(责任编辑:杜能钢)
