一种智能立体车库的设计与实验室实现
2019-05-24付立华白靖宇庞展翔
付立华, 白靖宇, 庞展翔
(河南工程学院 电气信息工程学院, 郑州 451191)
0 引 言
目前,汽车已成为很多家庭的必需品。我国人口众多,越来越多的汽车需要大量的停车位,而土地资源又十分紧张,因此,常规平面式停车场无法满足现阶段社会的需求。设计一款智能立体停车库具有重要意义。21世纪初期,自动化技术得到了广泛应用,出现了以自动化技术为基础的立体式停车场,在一定程度上缓解了停车难的问题[1-4]。我国智能立体停车场起步较晚,与国外相比还存在一定的差距,有待提高。
本文设计了立体车库的实物模型;硬件设计以及主要元器件选型;软件设计主要包括PLC主控制程序设计、触摸屏控制界面设计和GPRS远程监控界面设计。
1 系统主要功能与整体框图
1.1 立体车库主要功能
(1) 存车时,用户进入车库把车停到指定位置的车架上,点击触摸屏界面上的‘停车’按钮,系统显示取车号码并自动将车存入车库。取车时,用户支付停车费并输入取车码,系统自动完成取车。
(2) 车库内无人时,车库照明灯灭。有人时,车库照明闻声亮。
(3) 显示当前空车位数量。
(4) 实现互联网远程监控。
(5) 机械臂存车时间不超过3 min。
1.2 系统整体框图
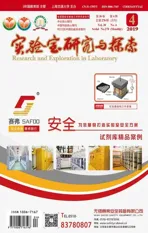
系统整体框图如图1所示。PLC接收到触摸屏或移动终端的指令后,控制三轴步进定位装置移动车架托盘完成车辆的存取;同时启动减速电动机驱动升降架上下运动,完成车辆托盘的添加;声光传感器检测到有车驶入车库同时光线不足时,通过声控打开LED灯进行照明;接近开关检测车位是否有车,通过数码管显示空车位数量。
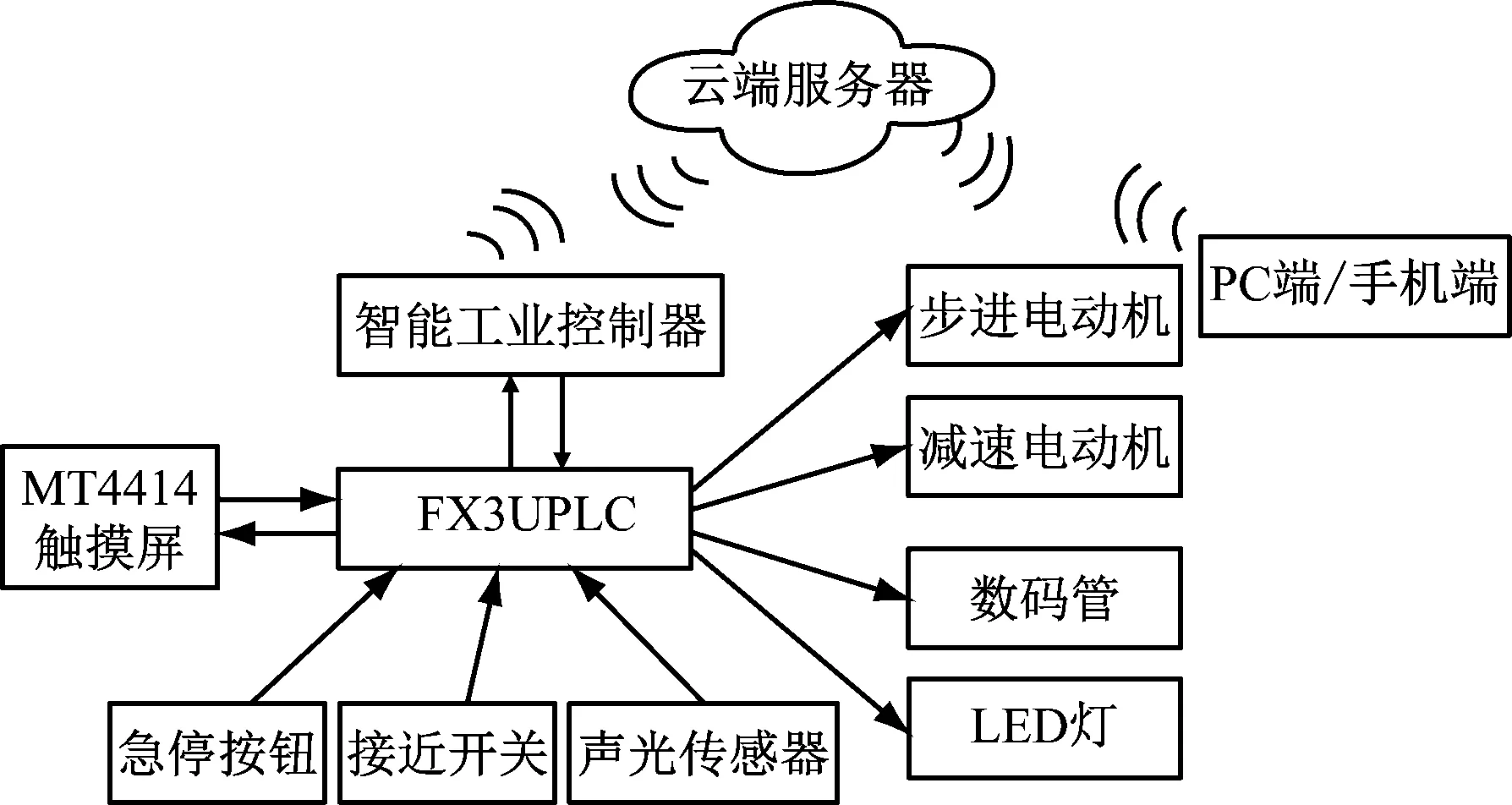
图1 系统整体框图
2 硬件设计
2.1 三轴定位装置的机械设计
系统的三轴定位机械装置由4条5 mm×45 mm、导程为75 mm的滑轨组成,如图2所示。X轴控制托盘左右移动;Y轴控制托盘前后移动;Z轴控制托盘上下运动。X轴的导轨比其他的导轨长10 cm,以确保有足够的空间放置车库模型;Y轴有2条导轨,在两导轨之间添加连接杆以实现一台步进电动机控制双导轨。
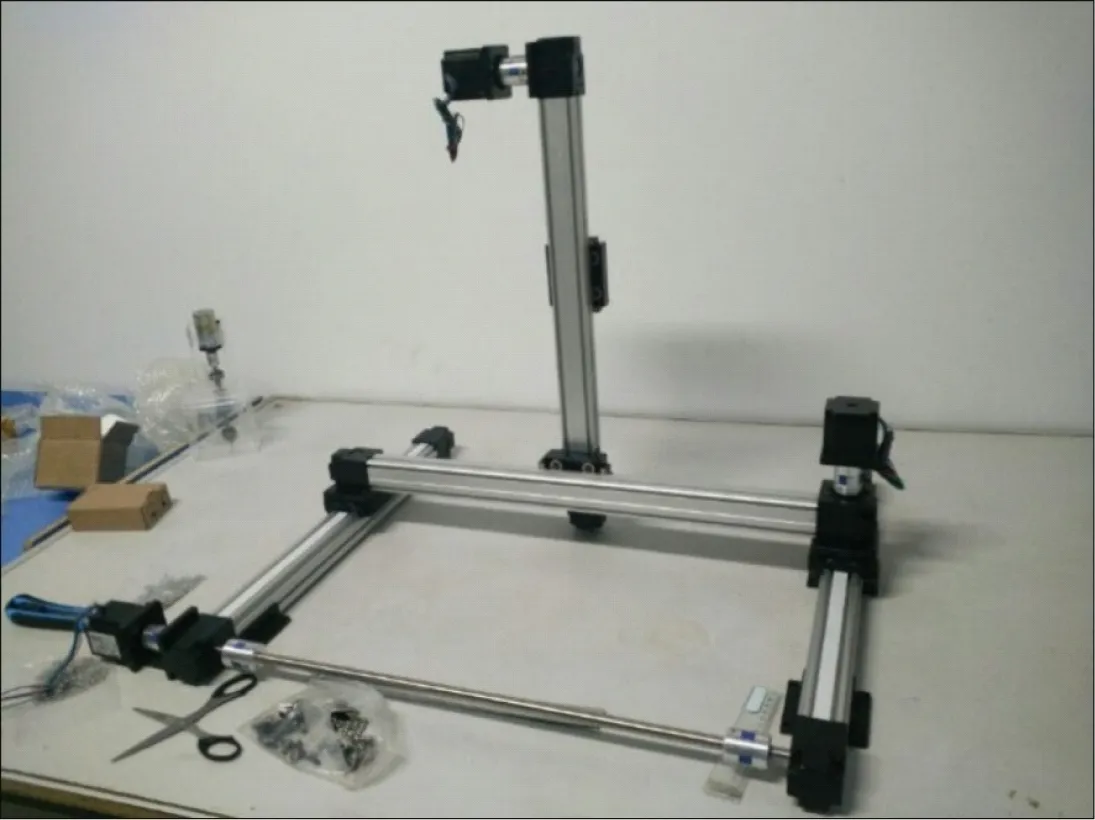
图2 三轴定位机械装置
2.2 步进电动机与驱动器
57型步进电动机的步距角为1.8°,即步进电动机接收200个脉冲旋转1圈,精度难以满足要求。为了提高控制精度,使用TB6600步进驱动器进行细分,控制后可达到6 400个脉冲1周[5-7]。同时,步进电动机价格便宜,还可节约成本。3台步进电动机接线原理如图3所示。

图3 3台步进电动机接线原理图
2.3 车架升降电路
车架升降装置可以避免人工添加运送车辆的托盘,实现多次存取。减速电动机和丝杆组成车架升降装置,减速电动机控制原理接线如图4所示。

图4 减速电动机控制原理接线图
2.4 自动照明电路
光照不足,有车辆或人进入车库时,可利用声控自动打开照明灯,声光传感器和LED灯接线原理如图5所示。

图5 声光传感器和LED灯接线原理图
2.5 接近开关
光电接近开关用于检测车位上是否有车[8-10]。OMRON TL-Q5MC型光电接近开关有两根电源线,一根信号输出线,接线比较简单,只需把信号输出线接到PLC即可。
2.6 车库状态指示灯电路
当车库有空车位时,绿灯亮起,代表可以进入;车库满车时,绿灯熄灭红灯亮起。工作原理:使用PLC控制一个继电器,利用继电器的工作特性,实现PLC间接控制红绿指示灯交替工作的功能,车库指示灯接线原理如图6所示。
图6 车库指示灯接线原理图
2.7 空车位数量显示数码管
常规的数码管控制需要7个输出点,为节约输出点,系统选用带位选锁存的BCD码2位数码管模块。该模块只有6个输出点,可控制2位数码管显示。
2.8 PLC整体原理接线图
三菱FX3U-32M属于第3代可编程控制器,性能在FX2N的基础上有了较大的提高,它含有3个高速脉冲输出口,非常适合本文的三轴转运车辆装置。根据系统的控制要求和对I/O输出输入点的分析,PLC整体原理接线如图7所示。

图7 PLC原理接线图
2.9 GPRS远程通信模块
智能工业控制器又称GPRS模块,它可把PLC中的各种数字量、开关量发送至互联网云端,从而实现远程控制,智能工业控制器与三菱RS-485-BD接线如图8所示。两者连接后,智能工业控制器可读取设备的数据库并以GPRS模式将读取的数据发送到云端。用户就可以通过使用手机APP或者电脑网页登录云端查看系统的各项数据;当用户通过网络给系统发出命令时,控制信号通过无线网络传到智能工业控制器模块,然后再通过RS-485传给设备,即可使设备当前状态发生改变。


图8 智能工业控制器与RS-485-BD接线图
3 软件程序设计
3.1 PLC程序设计
系统主程序分为停车和取车两部分,主程序流程图如图9所示。存车时,系统先判断当前所有空车位中哪个距离停车点最近,系统将会把该空车位的位置参数写入执行程序[11-13]。然后,保存取车码,在存车的同时,数码管的显示数字减1,存车完毕。取车时,系统收到取车指令,判断输入的取车码是否正确,若错误则返回系统等待。取车码正确,计算停车费用,如果已支付停车费用,系统将车取出,数码管的显示数字增1,取车完毕。如果不支付,返回系统等待。
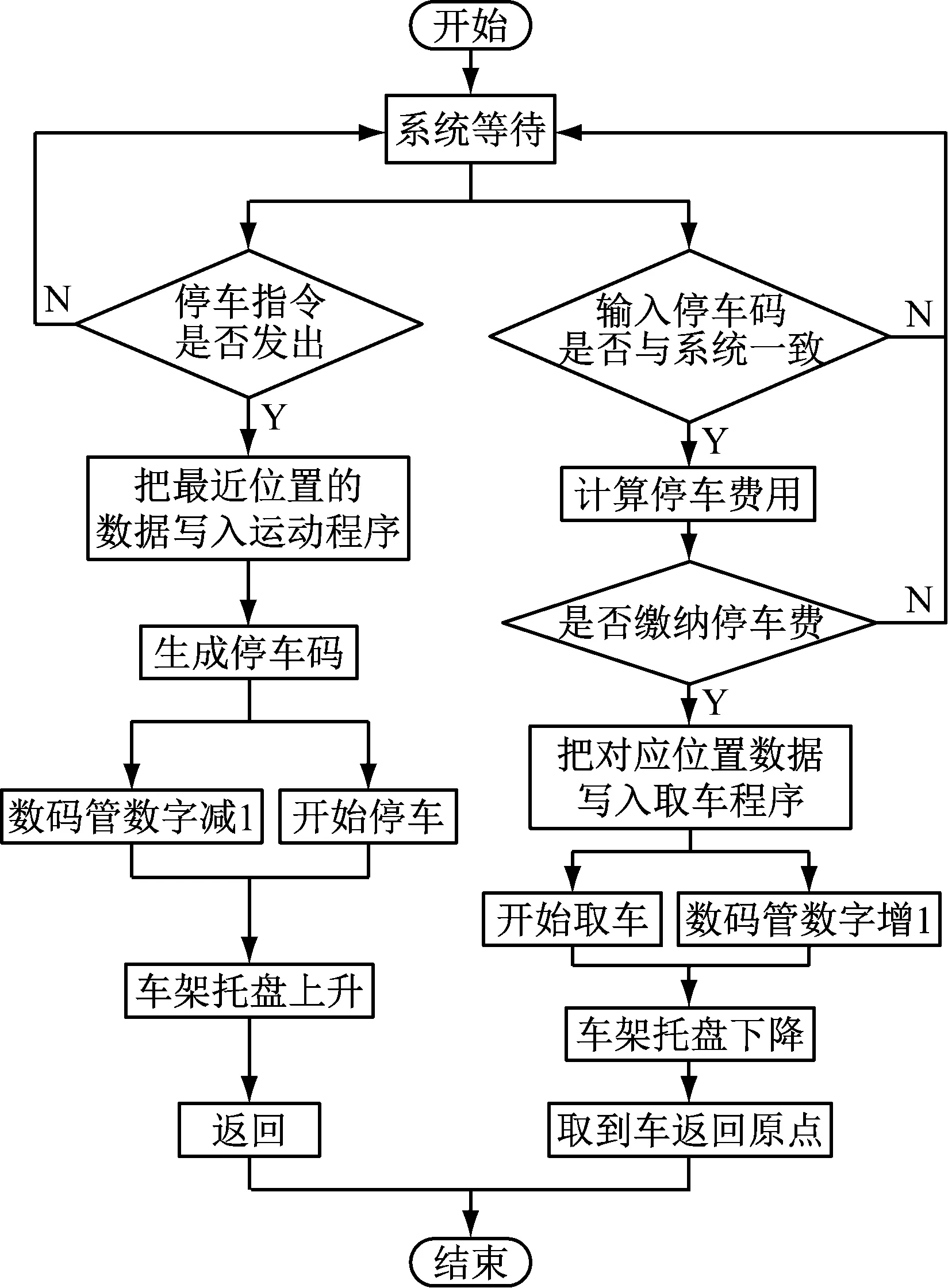
图9 主程序流程图
存车过程中,离开车架位置、入库、出库和回车架位置的动作是相同而且固定的,只是车位位置不同。因此,上述动作程序参数保持不变,仅有车位位置参数变化。
3.1.1 停车动作程序
每个位置的停车动作程序只有位置参数不一样,因此可共用一个动作程序,需要停到哪个位置就把哪个位置的参数写入程序中。存车动作程序包括离开车架位置程序、入库和出库程序、回车架位置程序和车位位置参数程序。
3.1.2 取车动作程序
取车动作程序与存车动作程序相似,主要是把离开车架位置和入库出库程序逻辑改变一下。在存车时,动作是先抬起,再后退;取车是先后退再抬起。存车是入库后放置汽车后离库,取车是入库后抬起,再离库,车库位置参数程序不变。唯一不同的是回初始车架位置的程序不同,存车完成后,转运装置先回到Z轴和X轴原点,再回到Y轴原点;取车时,转运装置先下降到一定高度后先回到X轴原点,再回到Y轴原点,最后回到Z轴原点。
3.1.3 生成取车码程序
系统根据停车时间生成3组共12位取车码,以确保号码的唯一性。
3.1.4 写入取车码程序
输入取车码之后,系统先对取车码一一判断是否与程序内部存储的取车码相同,再判断与该取车码相对应的车位是否有车。如果取车码相同且车位有车,则将车取出;如果取车码不相同或者对应车位无车,则提示错误。
3.1.5 计费程序
系统根据停车时间总长进行计费,≤2 h,费用是10元;>2 h≤4 h,费用为15元;>4 h,费用20元。
3.1.6 车架升降程序
存车时,车架升降装置升起,停车托盘出现在车架上后停止升起;取车时,停车托盘离开车位后延时4 s,车架开始下降,下降一个托盘空位之后停止。
3.2 远程监控界面设计
智能工业控制器的程序设计与组态设计相似。首先,打开软件新建一个工程,设置通信参数。三菱FX3U使用RS-458通信协议,因此,选择485通信协议[14-15]。通信参数与三菱PLC的通信参数必须保持一致。工程建立完成后,在变量界面点击右键,打开操作菜单,点击新建变量,添加变量。它有一个“扩展Web属性”的编辑界面,可以对变量在网页显示的状态进行编辑。最后,编译下载程序到智能工业控制器,安装开通流量的SIM卡,即可实现无线网络数据收发。通过上网设备登录云网页,可监控系统当前状态。图10和图11分别为智能立体车库网络监视界面和网络控制界面。

图10 智能立体车库远程网络监视界面

图11 智能立体车库远程网络控制界面
3.3 人机界面设计
(1) 功能选择界面。在该界面,停车和取车的按钮与PLC中M15和M17变量相连接,当按下对应按钮时,对应的动作程序初始化,同时进入到下一界面。功能选择界面如图12所示。
(2) 取车码输入界面。取车码可以直接从触摸屏上直接写入PLC对应的数据寄存器,系统将会自行判断取车码,如果正确则进入到下个界面,错误即弹出错窗口,提示重新输入。取车码输入界面如图13所示。
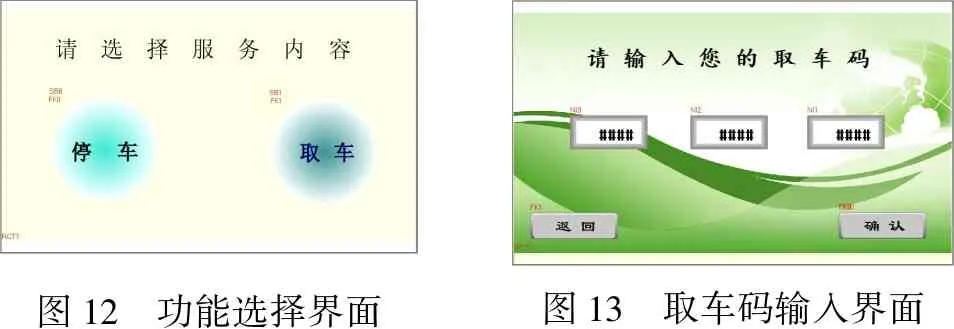
图12 功能选择界面图13 取车码输入界面
(3) 参数设置界面。在界面内可以实时更改PLC内部车位的位置参数,方便调试,参数设置界面如图14所示。

图14 参数设置界面
4 智能立体车库调试
车库模型设计成一个长方体,长方体上表面代表地面,设备走线都从长方体内部走。立体车库共有3×5=15个存车位,入口区设有车库状态指示灯及车库空车位数量显示数码管,车库内部设有照明,车库模型如图15所示。

图15 车库模型
分别向PLC、触摸屏、智能工业控制器导入智能立体车库程序,等待各个设备进入运行状态后开始调试。存车时车辆转运机械装置能准确快速将车存入到车库内空车位;取车时不仅可以准确将车从车位上取下,还可以判断取车验证码是否正确。数码管、LED指示灯都能正常工作;登录www.plcyun.com网络监视界面,首先查看所有车辆进出的信息是否有记录,然后查看监视停车场当前状态是否与实际一致,最后通过网络监控界面任意取出1辆车。经验证,以上所有操作均能实现。
5 结 语
本文运用PLC、触摸屏和智能工业控制器,设计了一种操作简单,使用方便的存取车服务系统。① 结合设计需求,选定合适的硬件,进行合理的电气设计。② 研究了步进电动机定位控制的方法。采用PLC作为控制中心,实现了比较精确的运动控制。③ 通过GPRS技术,完成了在移动终端的远程监控。
本设计的智能立体车库实物模型已经成功地作为创新实验室的实训教学模型使用,学生对此兴趣很大。经过学习和操作后,创新团队的学生对PLC控制系统的认识有了质的飞跃,取得了非常好的实用效果。