基于多相流的船式拖拉机减阻性能分析
2019-05-24戚得众周明刚刘明勇
戚得众,陈 龙,周明刚,龚 宇,刘明勇
(1.湖北工业大学 农机工程研究设计院,武汉 430068;2.湖北省农业机械工程研究设计院,武汉 430068)
0 引言
船式拖拉机源于20世纪六七十年代的机耕船,70年代开始对机耕船开始了大量的研究。为提高机耕船的工作效率,大量学者进行了理论加实验的深入研究。丁成杰[1]通过对机耕船的理论和整机的研究提出了一些看法,围绕机耕船的理论、设计、试验等方面的问题加以总结及交流经验。周用权等[2]列举了几种机耕船的总体参数,通过在湖田和浅泥脚田犁耕时船体支承反力合力作用点位置的计算,分析比较了总体设计参数相互关系的若干特点,提出了对整机整体布置及总体参数选取一些原则问题。周文浦[3]等为了降低起步阻力,在试验室内对模型船体进行了气幕减阻试验发现,利用气幕效应可使静置船体的起步阻力降低20%~25%。Thai, N. C.[4]通过理论和实验对船尾进行优化,得到一种特殊船尾结构具有较好的减阻性能。Zhou M等[5]对底盘进行了多次设计优化,得到一种可靠性较好的底盘结构,提升了机械性能。D.Gee- Clough等[6]指出影响船式拖拉机行驶中的阻力是由于行驶在水田或土壤中时表面的摩擦阻力最大。周明刚等[7]提出一种仿生学减阻法,并将这种仿生结构布置在船式拖拉机船壳上,使减阻性能得到提升。
以上研究大多是改进船体结构并通过试验验证来提升其工作性能,也有一部分学者在理论研究上进行探究。由于船体加工工艺复杂,对摩擦阻力的研究较多,而对兴波阻力的研究较少,因此本文结合船舶设计理论和流体力学计算,采用数值模拟方法,探索水田环境与工况速度对船体行驶阻力的影响并提出优化方案,验证其可靠性,设计出一种具有较小阻力船型。
1 数值模型
1.1 水田土壤流变模型
水田土壤含水率较高,一般被看作是非牛顿流体(即宾汉流体),具有粘稠、弹塑的综合力学性能特点。
水田土壤的流变特性根据流变学参数,简化模型的流变方程式为
(1)

在实验中采用的土壤具有明显的流变性能,土壤上层有一层薄薄的水界,混合的悬浊液中土壤颗粒较小,流动性明显。因此,在船式拖拉机行驶过程中船底与土壤上表面充分接触会兴起波浪,带来的摩擦力力和兴波会影响其行驶阻力。将水田土壤测量数据进行整理,结果如表1所示。
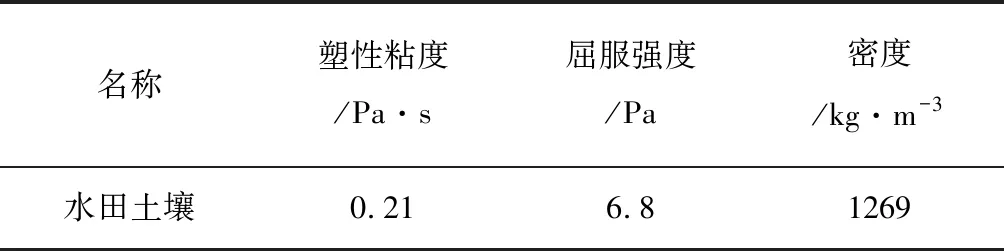
表1 水田土壤测量结果
1.2 船式拖拉机船体模型
本文以船式拖拉机为研究主体,建立了物理模型如图1所示。船式拖拉机在工作过程中与水田土壤之间的相互作用是船体阻力的主要来源。

图1 船体模型图
1.3 边界处理及网格划分
建立单相流模型和两相流模型,且当考虑水层对船体阻力的影响时就要建立三相流模型。单相流流域模型为1/4的圆柱体。通过实地考察测量,模拟设定整船行驶的路径及范围,船速为3m/s。船头的前流域为1倍的船长,船尾的后流域为3倍船长。由于两相流模型和三相流模型仅在速度入口处有差别,故不赘述。
三相流模型为长方体,计算域上表面距水平面1倍船长,其他参数同单相流。为了节省计算时间,取船体模型1/2作为研究对象。
模型进行网格划分,为得到精准数据,对船底及流域边界层的网格做加密处理,如图2所示。
模型一为只有水田土壤情况下的单相流,可以获得船体的粘性阻力;模型二为水田土壤加空气的两相流,可以获得船体在无水层水田土壤中,以不同工况速度作业时的兴波阻力;模型三为水田土壤、空气、水的三相流,可获得船体在水层中行驶的阻力变化。
单相流模型即为叠模绕流方法,则流域上表面和船体纵中剖面为对称边界,上游为速度入口,下游为自由出口,船体为壁面。两相流模型在单相流的模型上添加空气流域。三相流模型在两相流模型中添加水层域。多相流的边界条件同单相流类似,仅速度入口边界数量不同。

图2 边界层及流域网格图
2 数值计算
2.1 结果分析
经过数值仿真计算获得船式拖拉机船体的行驶阻力。
单相流模型下船体的总阻力即为船体的粘性阻力,包括摩擦阻力和粘压阻力。图3(a)为船体在不同工况速度下的阻力状况。由图3(a)可以看出,船式拖拉机船体的粘性阻力随工况速度增大而增大。
为得到船式拖拉机行驶过程中产生的兴波阻力,通过计算得到两相流结构下的总阻力,再减去叠模计算后的阻力。图3(b)为船体的兴波阻力与船体速度的关系曲线。由图3(b)可以看出,船体的兴波阻力也随速度在上升。
图3(c)表明3种模型计算的结果基本一致。由图3(c)可以看出没有水介的土壤和有水介的土壤对船式拖拉机的阻力影响,水层能够有效地减少总阻力。
探究不同水层下阻力的变化规律,无水介下的总阻力减去有水介的总阻力,从而得到减阻率验证阻力关系。由图3(d)可以看出,速度的不同也会引起阻力的变化。


图3 船体阻力与速度的关系
2.2 减阻分析
探究了船底水层分布的减阻规律,结果如图4(a)所示。运动时,水会沿着船体壁面流向船尾后部的泥坑中,而船底面的水很少,可以近似看作船体底部是与土壤直接接触,因此并不能靠水层来降低滑行摩擦阻力。
在实际工况中,船式拖拉机工作起来会使其周围的水和泥混合形成泥浆水并运动,这种状态下的水粘性较大,因此承压力会优于普通的水。运动中的船前端会流入泥浆水,对船壳起到一定的动力润滑作用。
运动中船壳底部各个部位的泥水压力值也是不一样的,在船壳的中心部位的压力值最大,而船两端的压力较小。为解决这种压力问题,本文提出一种在船壳底部安装挡板的方法,能够有效减小其总阻力。船体底部水分含量对比如图4所示。

图4 船体底部水分含量对比
在安装挡板后,泥浆水将不能从侧方流出,使船底的泥水层厚度增大,提高了润滑能力,减低了船式拖拉机的运动总阻力。
3 实验对比
由于泥浆水田土壤的工况复杂,且船式拖拉机在运动中的影响力太大,将会出现很大的误差并增加测量的难度,因此选取船模实验,粗略验证船在水田土壤中行驶产生的波形,再与数值结果做对比。
图5(a)为实地水面船体模形实验,图5(b)为本文数值仿真的结果。可以看出:两个结果的船侧面和尾端波形非常相似。
船模在水田土壤表面行驶时,图6(a)为自由波面在船体周围的兴波形状,图6(b)为数值模拟结果中自由液面波高分布云图。由这两幅图可以看出:船模的尾端兴起的波形与数值结果一致。因此,本文的数值分析结果具有可靠性。
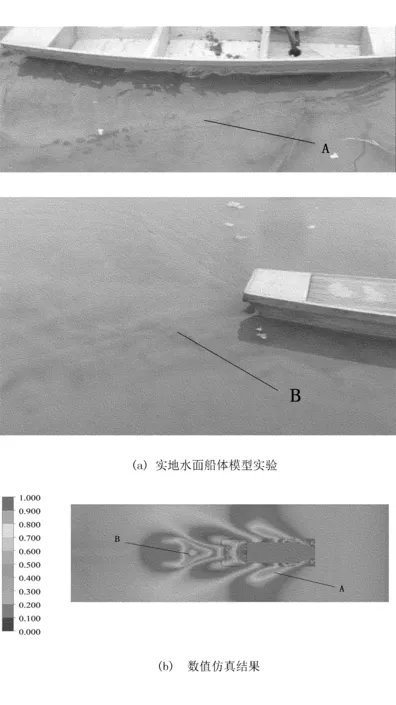
图5 水面船行波波形对比

图6 水田土壤船行波波形对比
4 结论
实地采取水田土壤并测量参数,建立基于非牛顿流体的宾汉流体流变模型,采用体积函数法构建船式拖拉机船体的多相流数值仿真模型,对船式拖拉机的行驶阻力进行分析并优化,得出结论:
1)得到了船式拖拉机在不同工况速度下的粘性阻力和兴波阻力。
2)在船式拖拉机船壳底部安装挡板的方法能够有效地减小运动总阻力。
3)开展船模实验,并与数值计算结果的船行波形状对比,结果表明二者波形较为相似,进一步说明数值计算的可靠性。
