采摘机械手伺服控制系统电气自动化设计——基于PLC控制器
2019-05-24尤向阳
尤向阳
(1.三门峡职业技术学院,河南 三门峡 472000;2.河南科技大学 应用工程学院,河南 三门峡 472000)
0 引言
目前,大部分地区的水果采收方法还是采用人工采摘方式,效率低,劳动强度大,安全性较差,极大地制约了水果产业化、商品化的发展,而如果引入采摘机器人对果实进行采收,将极大地提高果实的采摘效率。在果实成熟季节,一些果实的体积较大,在设计采摘机械手时可以将其设计成爪形的卡盘,然后用电动刀具切割枝干来完成摘取。但是,在摘取过程中,由于很多果实较为柔软,容易破碎,因此需要对采摘机械末端进行精确的控制。为了保证切割刀具和爪的协同工作,需要引入一种高效的控制系统。本次将PLC可编程控制器引入到采摘机械手的伺服控制系统中,以期提高控制系统的自动化程度和精度。
1 电机伺服系统及其在采摘机械手控制过程中的应用
电机伺服系统主要分为两类:一是DC直流伺服系统;二是AC交流伺服系统。其中,AC又可以分为异步电机和同步电机伺服系统。电气伺服系统的应用非常广泛,原因是电气伺服系统控制方便,驱动能源较为普及,没有污染,且设备的维护容易。近年来,随着电子技术和计算机技术的发展,电气伺服系统也有了较大的进步,应用前景越来越广阔。
交流伺服电机共分为两种形式:一是同步型;二是感应型。同步型电机采用永磁体,也叫无刷直流伺服电机,具有直流电机的各种优点,但不接触换向部件,需要编码器来实现;感应型电机是指笼型感应电动机,可以对转矩分量和激励分量同时控制,也具有直流电机的各种优点。
伺服系统一共分为4部分,包括定位模块、误差放大模块、执行部件和被控对象。其利用全封闭无刷结构,具有结构紧凑、外形小、质量轻、散热效果好、可靠性高、运行平稳等特点。由于其性能好、容量高,应用越来越广泛。伺服系统采用SPWM(脉宽调制变频)变频调速,触发器电路是脉冲波,这些脉冲波可以调脉宽,进而改变电路的电压。如按照正弦规律调频,就是SPWM变频调速。其原理如图1所示。

图1 SPWM变频的工作原理图
在进行变频调速时,如果想要输出正弦波电压,可以采用一系列幅值不变的矩形脉冲来等效,在相同时间内正弦波围城的面积和矩形波面积相同即可。等效的精确程度和单位时间内脉冲的数量有关,想要获取较高的精度,可以加大单位时间内脉冲的个数。本次采摘机械手的设计过程中,将采用伺服电机系统,并利用PLC可编程控制器对采摘动作进行控制,以提高采摘机械手的自动化程度和控制精度。
2 基于PLC的电气自动化控制系统设计
为了实现采摘机器人采摘机械手的自动化作业,需要采用相关硬件和自动化程度来控制机械手的执行末端。作业时,首先通过传感器对果实信息进行采集,并利用相关处理程序根据果实的大小和颜色来判断果实的成熟度,成功识别果实成熟度后给PLC发送采摘或者不采摘命令。如果不采摘,则继续下一个果实目标的识别;如果采摘,PLC在接受到信号之后驱动伺服电机的驱动器,对采摘目标进行采摘。其总体的控制原理如图2所示。

图2 系统控制原理图
系统主要由5部分组成,包括传感器、遥控器、PLC控制器、伺服电机驱动器及伺服电机。作业过程中,如果遇到特殊情况,采摘机器人操作人员还可以通过遥控器对其进行远程控制,驱动按钮直接安装在遥控器上,遥控器接受驱动命令后发动给PLC控制器,PLC直接驱动伺服电机驱动器来完成相关动作。伺服电机的控制,原理如图3所示。
伺服电机在控制时,需要采用专门的驱动器。包括脉冲发生单元、保护单元和功率驱动单元等,驱动器和功率驱动单元直接通过耦合来实现,控制单元利用微机控制实现。采摘机械手的软件控制设计流程如图4所示。
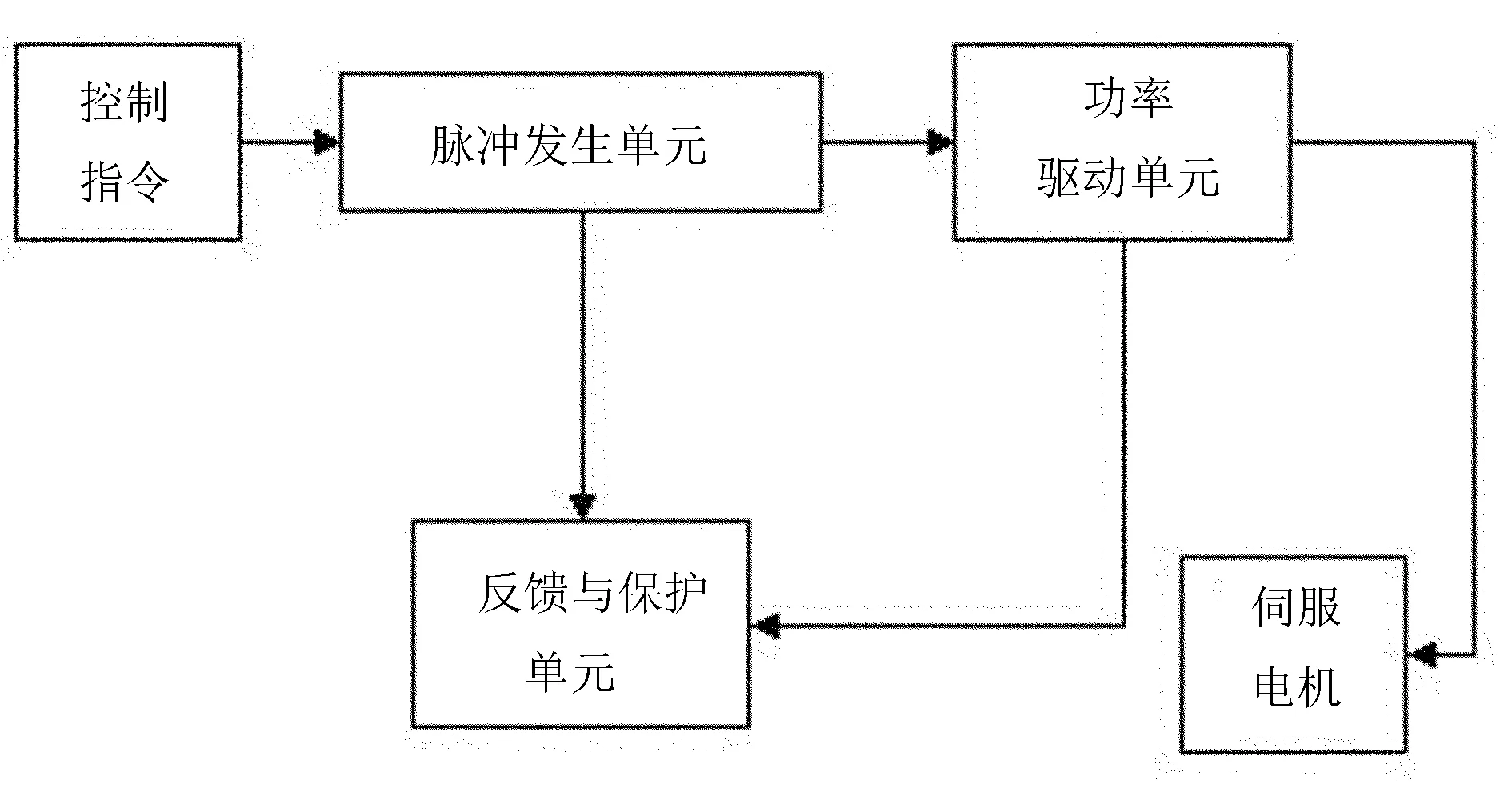
图3 伺服电机控制原理图

图4 软件设计流程
为了实现采摘机械手的精确采摘,采用软件编程的控制方式。在机械手到达待采摘的果实位置后,首先利用机械手进行抓取,启动收割机刀具,利用收割刀具将果实的枝柄割断,再进行取果操作。这个自动化采摘过程采用反馈调节的方式,如果抓取不成功,则重新定位抓取;如果割刀没有一次性将枝柄割断,则继续切割;取果后,采摘机械手重新恢复到待采摘点,进行下一次采摘操作。
伺服电机的PLC控制程序可以通过梯形语言来进行编制,控制程序在上位机中编制、调试和编译后,即可下载到 PLC 中。图5为伺服电机的控制程序。其中,Y0表示输出脉冲信号,Y1和Y2表示方向和脱机信号,STOP表示脉冲停止信号。在进行编制和调试时,可以首先安装西门子系列PLC进行编程调试,最后改用在实际采用的PLC芯片上。
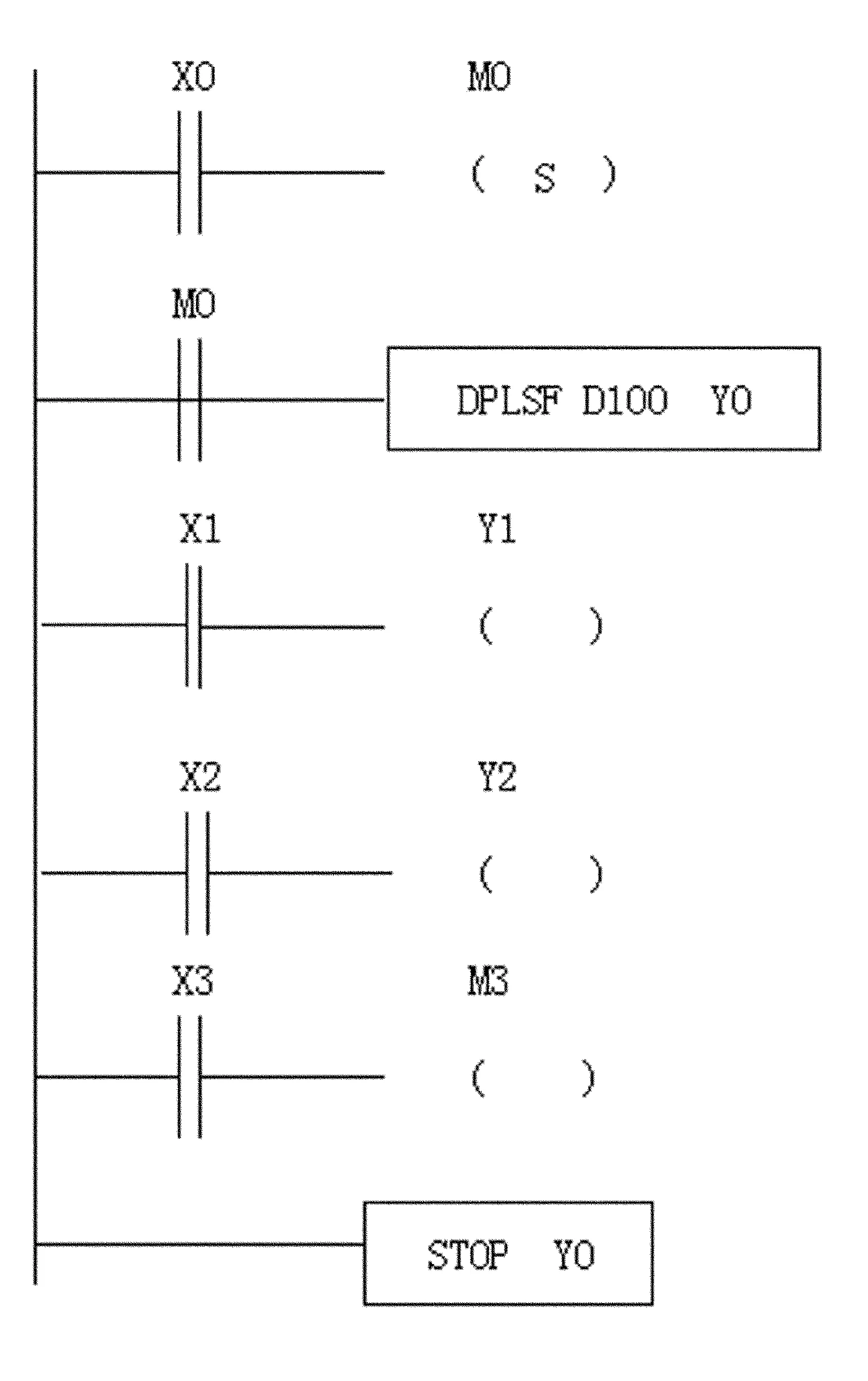
图5 伺服电机控制梯形图
3 采摘机器人果实自动化采摘系统测试
采摘机械手通过PLC编程和伺服电机控制,可以实现自动化采摘作业。为了完成采摘机器人的电气系统测试,还需要设计硬件系统和软件操作界面,进一步对其性能进行验证。
图6为采摘机械手作业过程的示意图。进行测试时,需要设计硬件系统来对各种信息进行采集。系统通过PLC核心控制器完成相关的采摘动作,同时通过人机界面对测试数据进行监测。硬件系统的框架结构如图7所示。
在测试系统上安装有远程按钮,可以对采摘机械手进行各种远程操控。采摘机器人的核心控制器采用PLC控制器,系统安装有人机界面,可以实现作业数据的采集和监测。最后,PLC通过执行部件,如接触器、继电器和指示灯驱动电机完成相关的动作。其硬件参数如表1所示。
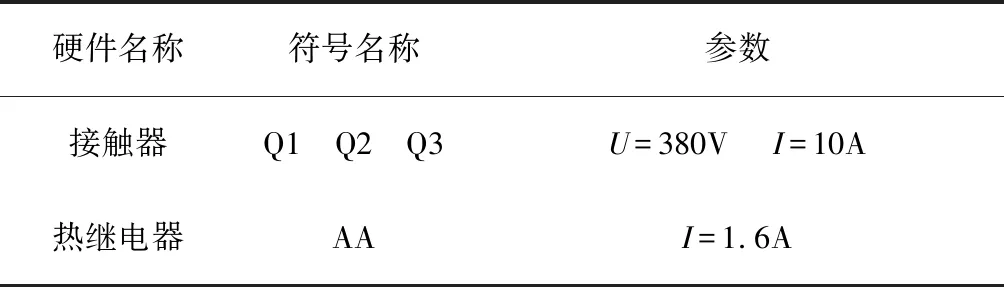
表1 测试系统硬件参数表

续表1
为了保证各器件协调工作,采用PLC集中控制的方式,设置各种硬件的接口。本次采用PLC是三菱公司的PLC产品,其实物图如图8所示。

图6 采摘机械手示意图
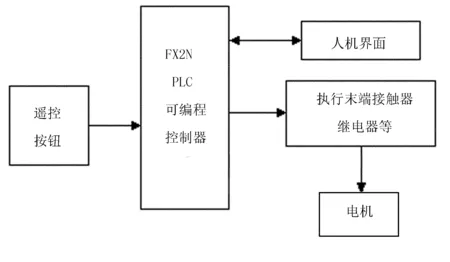
图7 实验测试硬件系统设计图

图8 PLC控制器实物图
PLC控制器可以完成接受指令、发出控制指令等功能,实现自动化采摘过程。在进行采摘作业测试时,主要对采摘成功率和采摘破损率进行了测试,结果如表2所示。

表2 采摘成功率和破损率
测试结果表明:采用PLC控制系统后,除了具有较高的自动化水平外,成功采摘率较高,果实破损率较低,能够满足高精度采摘的需求。
4 结论
为了提高采摘机器人机械手的采摘准确率和采摘精度,将PLC可编程控制器引入到了采摘机械手的伺服控制系统中,从而提高了采摘机械手各部件的协同作业水平及机械手作业的效率。为了验证PLC控制系统的可靠性,对采摘机械手进行了试验测试,结果表明:采摘机械手具有较高的采摘准率,且果实的破损率也较低,从而验证了PLC可编程控制器在采摘机器人伺服控制系统中使用的可行性,对于提高采摘机械手的采摘精度和效率具有重要的意义。
