一种铰接式玉米田间管理机的运动学与动力学分析
2019-05-24申屠留芳秦绍波孙星钊孙亚军
申屠留芳,秦绍波,孙星钊,孙亚军,3
(1.淮海工学院 机械工程学院,江苏 连云港 222005;2.连云港市元天农机研究所,江苏 连云港 222006;3.中国矿业大学 机电学院,江苏 徐州 221008)
0 引言
针对目前玉米田间管理作业技术落后的现状,设计了一种新型多功能铰接式玉米田间管理机。其改变了传统的管理作业方法,采用高地隙底盘,利用强劲动力输出,完成一系列的田间管理作业(中耕除草、喷药洒水、施肥培土),大大减轻了农民的劳动强度,提高了工作效率,可以解决目前玉米中期管理难的问题。该田间管理机工作稳定,集成化程度高,操作简单,成本低。
玉米田间管理机的转向性能是衡量管理机总体性能的一个重要指标,转向性能好,转向轻便。工作效率越高,其安全性和稳定性越好[1]。因此,很有必要对铰接式玉米田间管理机转向性能进行研究。
1 管理机转向运动学分析
1.1 铰接架转向系统运动学分析
铰接式玉米田间管理机的转向是由驾驶员操作液压转向器来拉动固定在前后车架链接处的液压横拉杆而转向的,中间铰接架起到转向中轴的作用。因此,通过对铰接架转向运动学的分析可求出管理机的理论最大转向角,这对于管理机能否在空地狭小的玉米地里灵活转向起到至关重要的作用。
中间铰接架的主体由两段圆钢垂直焊接而成,其垂直于地面的一端与前车架连接,当管理机转向时作为转向销轴;转向由两个交叉式液压油缸控制,各个液压油缸连接在各端的前后铰接点处,通过液压转向器的控制来达到精准转向的目的。其整个转向运动的过程可简化为平面运动,以销轴中心为原点,x轴为横向平行线,y轴为纵向平行线建立坐标系xoy,其转向机构示意图如图1所示;液压油缸转向示意图如图2所示。
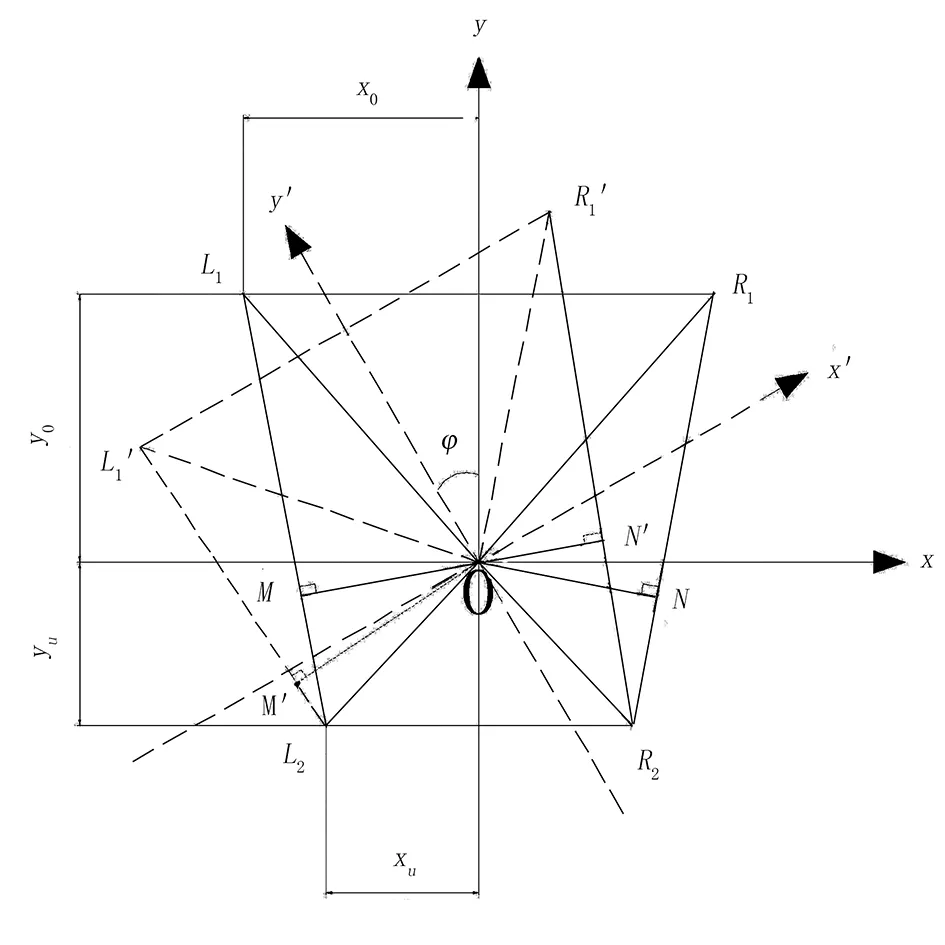
图1 转向结构示意图Fig.1 Schematic diagram of steering structure


(1)
右侧活塞位移量Lr与转向角φ的关系式为

(2)
已知xo=300mm,xu=180mm,yo=380mm,yu=80mm,活塞位移量Lr最大为150mm,由式(1)求解可知,转向角最大为φ=54°,管理机样机在空地进行最大转向角实验中所测得的最大转向角φmax≈48°[2],与理论结果相比差别不大,因此管理机转向角度的变化与转向拉杆的关系与理论分析相一致。
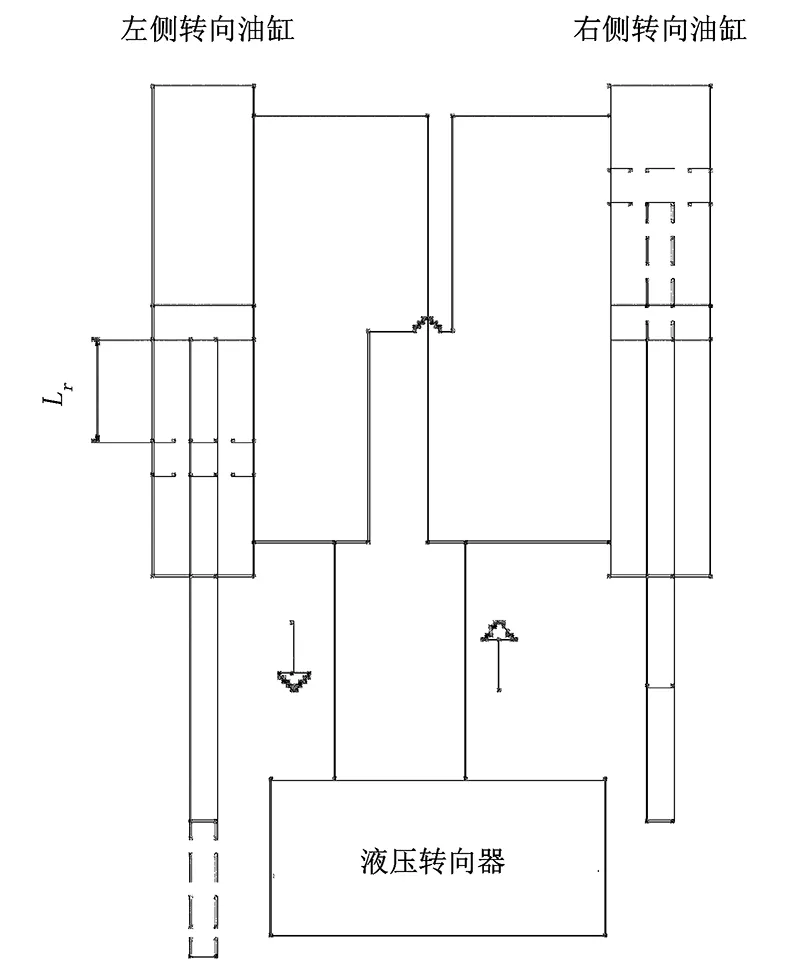
图2 液压油缸转向示意图Fig.2 The schematic of hydraulic oil cylinder steering

(3)

(4)

1.2 管理机静态转向运动学分析
管理机在原地转向时,由于前后车架不固定,因此管理机前后车架会产生相对于地面不同的偏转,如果地面不是水平路面,前后车架还会产生相对的垂直运动,此时的自由度更加复杂[3]。为了更简洁、准确地进行铰接式管理机转向运动学分析,应做以下几点假设:①管理机在水平路面上运动,减少自由度以降低分析的复杂度;②滚动阻力大的一端车桥不能平行移动,小的一端车桥产生平行移动;③由于铰接架的销轴与铰接架壳体连接处有由尼龙棒加工而成的套筒作为隔套,所以转向时的摩擦力很小,此时可假设为零;④排除机油、柴油、水等液体的流动,假设转向时4只轮上的负荷固定不变。
根据以上的假设可建立铰接式管理机静态转向模型示意图,如图3所示。
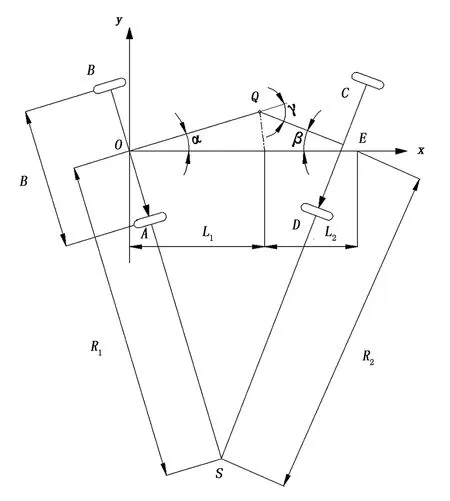
图3 管理机静态转向模型示意图Fig.3 Schematic diagram of static steering model of management machine
当转向角为γ时,前车架相对转角式为
α=γ-sin-1(ksinγ)
(5)
后车架相对转角式为
β=sin-1(ksinγ)
(6)
根据推导公式可知:4只轮子各个坐标如下:


其中,B为轮距,B=1 900mm。
将式(5)、式(6)对时间t微分,得
(7)
ω2=ψω
(8)
由于管理机转角范围以及转向系数都是已知的,所以可以得到管理机转向时前、后车架的偏转角速度随转向角的变化规律。
2 管理机的转向动力学分析
管理机在转向过程中,前、后车架都要相对地面发生偏转,由于自由度不唯一,所以前、后车架的运动形式也不唯一。当管理机空载时,由于前桥载荷大于后桥载荷,管理机转向过程中,后车架会发生偏转方向的滑移;当管理机满载时,此时后桥载荷大于前桥载荷,管理机转向时前车架便会发生偏转方向的滑移[4]。
由于前、后桥是刚性连接,在转向时,传动件会逐渐扭紧,此时轮胎会发生滑移产生剪切变形。管理机原地转向时,左右车轮转向相反,所受的滚动阻力对车桥的偏转瞬心形成阻力矩,所以转向阻力矩除了轮胎绕接地面中心偏转时的摩擦阻力矩外,还有左右车轮转向相反所引起的阻力。
管理机的静态转向阻力矩值比动态转向阻力矩值大2~3倍,所以该管理机在静态转向时阻力矩为最大值,因此对转向动力学的分析主要是研究原地静态转向工况。管理机的原地转向力学模型如图4所示。

图4 管理机转向受力坐标示意图Fig.4 Schematic diagram of steering force coordinate of management machine
由管理机原地转向力学模型图可知
(9)
图(4)中,L1、L2分别为铰接点至前、后桥中心的距离;MA、MB、MC和MD分别为各个车轮的偏转阻力矩;TA、TB、TC和TD为各个车轮的滚动阻力矩。
通过分析可知:求出管理机静态转向的阻力矩,则需确定由车轮纯滚动引起的滚动阻力矩、传动件扭紧引起的切向力及车轮侧向滑动引起的偏转阻力矩。
2.1 管理机转向车轮摩擦阻力矩计算
当管理机转向时,轮胎产生以垂直线为轴线的转动,此时的轴线通过轮胎与地面接触面的形心。铰接式玉米田间管理机四轮采用的轮胎都为橡胶凸耳轮,可默认为刚性轮胎,接触地面区域如图5所示。

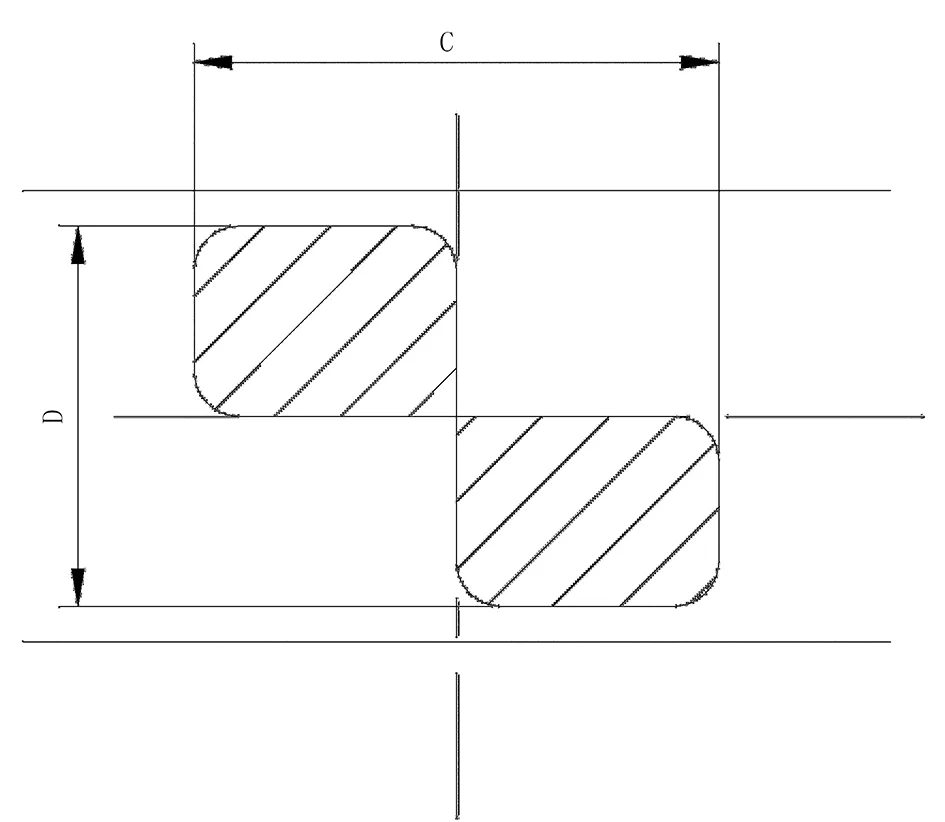
图5 轮胎与地面接触面简图Fig.5 Schematic diagram of tire contact area
2.2 管理机转向车桥滚动阻力矩计算
管理机转向时,由于左右车轮转向方向相反,所受的滚动阻力对车桥的偏转瞬心形成的阻力偶矩为
(10)
式中G—车桥载荷;
f—滚动阻力系数;
B—轮距。
2.3 管理机原地转向阻力矩计算
由于管理机转向时,所受力较为复杂,因此可以采用虚位移原理来求解,根据虚位移公式[7]得
(11)


静态转向阻力矩为
M·δγ-MF·δα-MR·δβ-F·δ=0
化为阻力矩M等式(12),即
(12)
其中,M为转向力矩,虚位移为δγ;MF为前桥转向阻力矩,虚位移为δα;MR为后桥转向阻力矩,虚位移为δr。当管理机满载时,有前桥切向力为F1,虚位移为δ1;当管理机空载时,有后桥切向力F2,虚位移为δ2。
各力对应的虚位移为
M:δγ
当管理机空载时,G1>G2,此时转向时由于使轮胎产生剪切变形和打滑,转向时负荷较小的车架会被拖动,所以后车架会往前滑移一段距离。此时,有后桥所受切向力式(13),前桥转向阻力矩式,后桥转向阻力矩式(15),即
F1=G2·φ
(13)
MF=Mmfl+Mmfr+Mgf
(14)
MR=Mgf
(15)
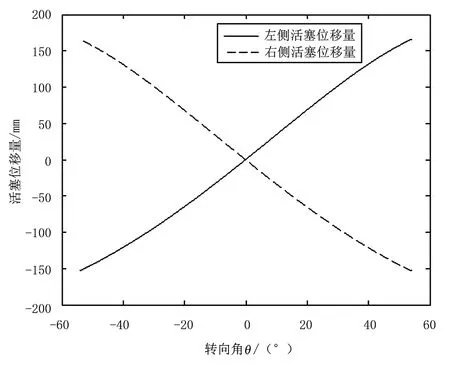
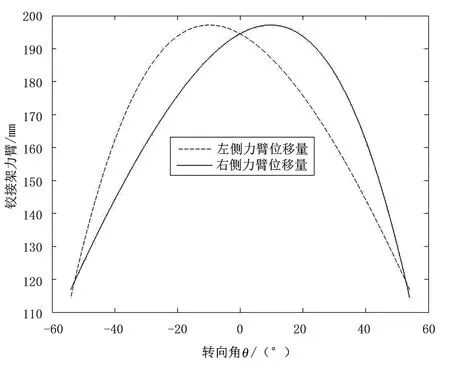
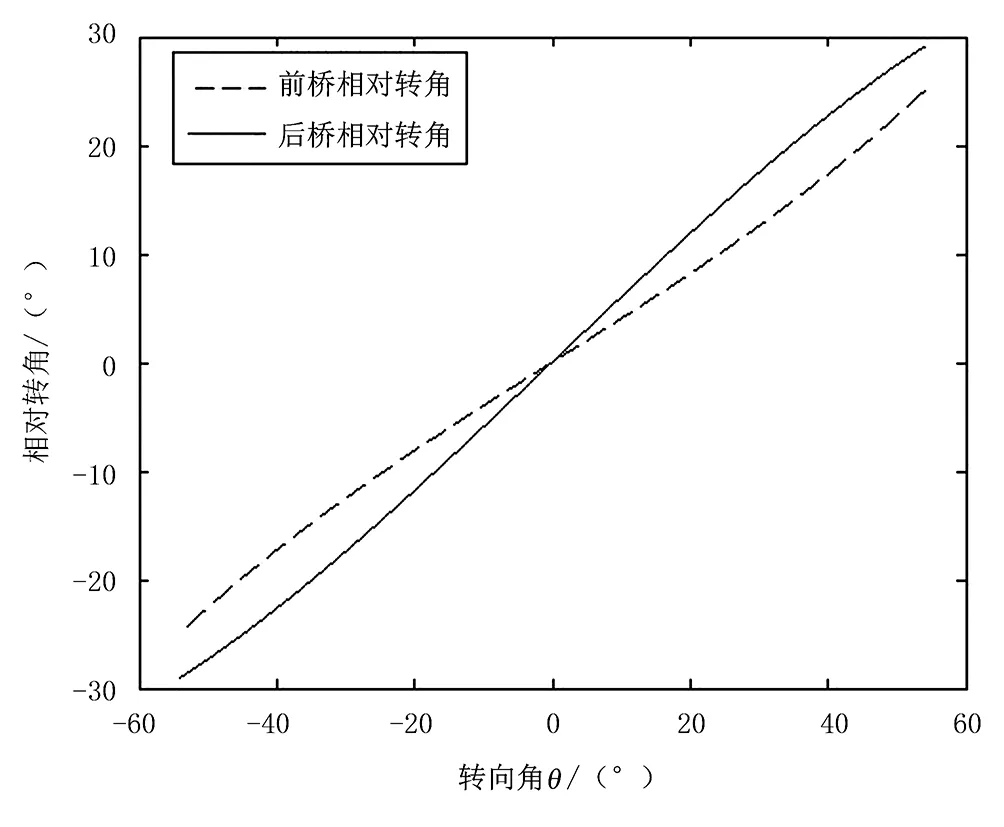
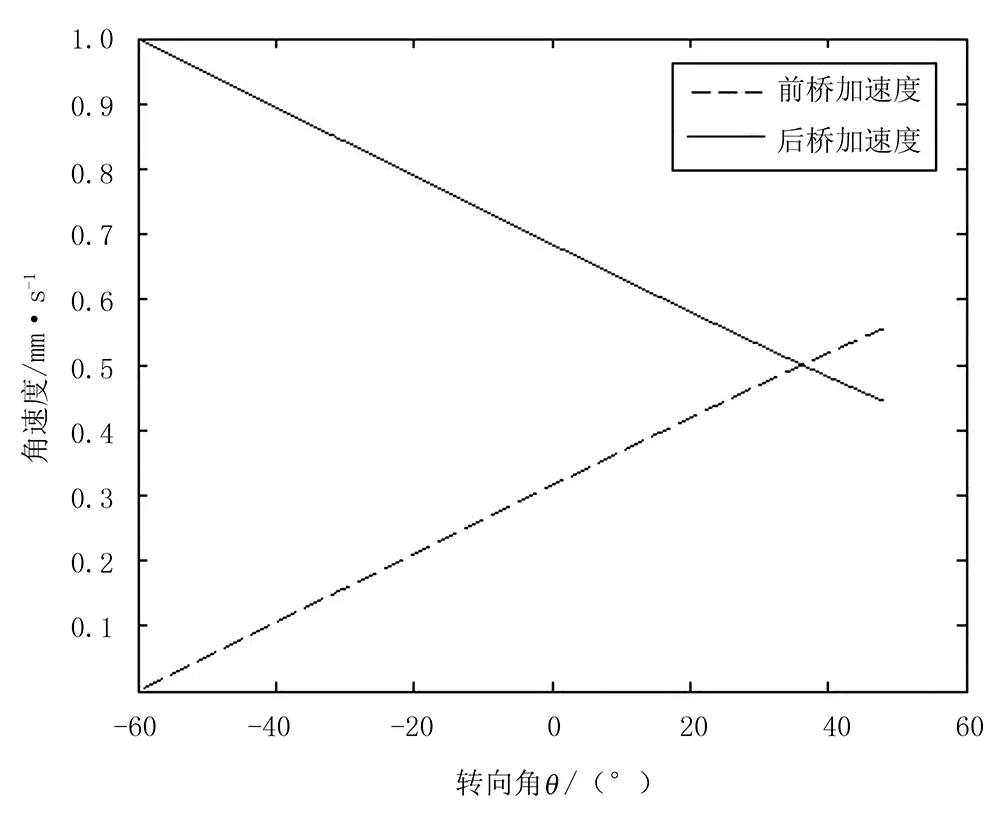
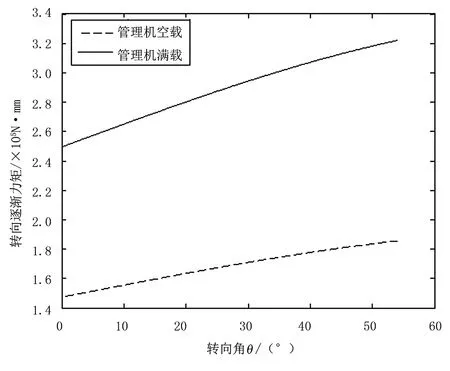
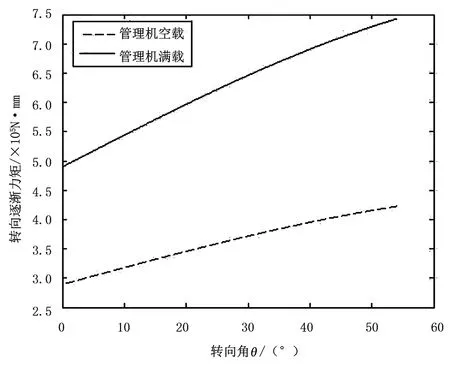
当管理机满载时,G1 F2=G1·φ (16) MF=Mgr (17) MR=Mmrl+Mmrr+Mgr (18) 式中Mmfl—前桥左车轮的摩擦阻力矩; Mmfr—前桥右车轮的摩擦阻力矩; Mmrl—后桥左车轮的摩擦阻力矩; Mmfl—后桥右车轮的摩擦阻力矩; Mgf—前桥滚动阻力矩; Mgr—后桥滚动阻力矩; F1—前桥切向力; F2—后桥切向力; G1—前桥载荷; G2—后桥载荷; φ—车轮地面附着系数。 根据以上分析,由式(13)~式(15)可求出管理机在空载工况下静态转向时的阻力矩与车轮转角的对应关系;由式(16)~式(18)可求出管理机在满载工况下静态转向时的阻力矩与车轮转角的对应关系。 根据以上的理论推导,应用MatLab软件对铰接式玉米田间管理机进行原地静态转向运动学与动力学仿真运算。 铰接式玉米田间管理机具体参数如表1所示。 表1 铰接式玉米田间管理机的参数表Table 1 The parameterTable of articulated maize field management machine 首先对管理机铰接架转向进行仿真,通过式(1)、式(2)可知:左右液压油缸活塞位移量与转角之间的关系如图6所示。 图6 左右活塞位移量与转向角关系图Fig.6 The relation diagram of the displacement and steering angle of left and right piston 由图(6)可以看出:左右液压油缸活塞位移量在管理机转角范围内对称于x=0、y=0,且左右油缸活塞位移量与转角之间接近线性关系。说明在管理机转向时,左右转角的幅度是相同的,理论上避免了出现“一边转角大一边转角小”的情况。 根据式(3)、式(4)得出左右转向油缸转向力臂随转向角的变化规律如图7所示。 由图(7)可以看出:左右力臂位移量在管理机转角范围内对称于x=0,由最右端开始转向时,两侧油缸力臂均逐渐加大,左侧油缸力臂过中点后逐渐减小,而右侧油缸力臂在中点之前达到最大值然后逐渐减小。说明在管理机转向时,左右转角的增幅是相同的,理论上避免了出现“一边转角快一边转角慢”的情况。 图7 左右油缸力臂与转向角关系图Fig.7 The relation diagram of right and left oil cylinder force arm and steering angle 根据式(5)、式(6)得出管理机前、后桥转向角速度随转向角的变化规律如图8所示。 图8 前、后桥相对转角与转向角关系图Fig.8 The relation diagram of the front and rear axles relative rotation angle and steering angle 由图(8)可以看出:前、后桥的相对转角在管理机转角范围内对称于x=y,在转向角开始变大时,前、后桥相对转角均逐渐加大,且在转向角为零之前,前桥的相对转角均大于后桥的相对转角,但转向角为零之后,后桥的相对转角均大于前桥的相对转角。 最后,对前、后车架的转向角速度与转向角之间的关系进行仿真,将时间视为无线接近于零,根据式(7)、式(8)得出前、后车架的转角速度与转向的变化规律如图9所示。 图9 前、后桥转角速度与转向角关系图Fig.9 The relation diagram of the front and rear axles angular velocity and steering angle 由图(9)可以看出:在管理机从右侧开始转向时,前桥转向角速度随线性变化逐渐增大,后桥的转向角速度随线性变化开始减小;当转向角为48°时,两车桥转向角速度相同,此时也是管理机的实际最大转向角;管理机从左侧开始转向时情况正好与上述相反。说明管理机前、后车桥的转向角速度呈线性变化,且规律相同,转向平稳。 铰接式玉米田间管理机主要用于玉米生长中期的田间管理工作,所以管理机主要是在田地中以及水泥路这两种路况上行驶,这两种路况上管理机静态转向时所受的转向阻力矩是不同的,主要原因在于附着系数以及轮胎滚动阻力系数不同(具体数值见表1)。因此,需要在田地以及水泥地这两种路况对管理进行机动力学仿真。 通过式(12)~式(14)可知:管理机在水泥地上转向所受阻力矩与转向角之间的关系如图10所示。由图(10)可以看出:在水泥地路况下,管理机在空载及满载时的静态转向所受阻力矩与转向角的关系,随着转向角的增大,管理机所受转向阻力矩也逐步变大,但在满载工况下的增幅随着转向角的增大明显大于管理机在空载工况所受的转向阻力矩。 通过式(15)~式(17)可知管理机在田地上转向所受阻力矩与转向角之间的关系如图11所示。 由图(11)可以看出:在田地路况下,管理机在空载及满载时的静态转向所受阻力矩与转向角的关系与在水泥地所受的阻力矩规律相同,都是随着转向角的增大而增大,且满载工况下的阻力矩增幅大于空载工况下的阻力矩;而同一转向角的管理机无论空载或是满载,在田地里所受的转向阻力矩都远远大于水泥地路况下的阻力矩,这是由于在田地路况下的附着系数变小而轮胎滚动阻力系数变大所导致。因此,当管理机满载在田地路况下转向角为54°时的转向阻力矩为最大值约750 000N。 图10 水泥地路况下所受阻力矩与转向角关系图Fig.10 The relation diagram of the hindered moment and steering angle under the condition of cement road 图11 田地路况下所受阻力矩与转向角关系图Fig.11 The relation diagram of the hindered moment and steering angle under the condition of the field 1)通过对管理机的运动学分析,推导了铰接架转向油缸活塞位移、力臂,以及管理机前、后车架与转向角之间的关系。 2)通过对管理机动力学分析,推导了管理机在不同工况、路况下的转向阻力矩与转向角之间的关系与主要影响因素。 3)最后应用MatLab软件进行仿真,得到管理机运动学与动力学结果图解。3 管理机静态转向阻力矩仿真实验

3.1 管理机运动学仿真
3.2 管理机动力学仿真
4 结论
