无人水面艇的双目视觉应用
2019-05-23费鹏李鑫
费鹏 李鑫
摘 要:双目视觉技术在汽车辅助驾驶,三维重建,机器人等领域具有广泛应用,本文通过实验,将该技术应用于海洋场景下实现无人艇對环境的感知,本文通过海上实验平台,实地采集了海洋场景下的左右目视图,并对校准后的双目运用SAD方法进行视差立体匹配计算并最终生成海面场景下的视差图像,在ROS下将视差图像映射到三维点云空间,通过点云测量距离与激光测距距离相比较得到双目观测误差的结果,本文通过实验验证了双目视觉技术应用于海洋环境下为无人水面艇提供视觉导航的可行性,具有一定的实用意义。
关键词:双目视觉 无人艇 usv
1.引言
无人艇又称USV(Unmanned Surface Vessel)相较于无人车,无人机而言还是一个比较陌生的无人系统平台,与前者不同的是,其工作场景是在海洋,江湖等区域,能够执行海洋侦察,运输,作战等多种任务,另外还具有适应恶劣环境,高速灵活机动性的特点,双目视觉技术是一种被动式环境感知技术,在获得左右目图像的同时可以计算出环境的深度信息,且能够根据观测需要动态调整以适应环境观测需要,具有低成本等优势,将双目视觉技术应用于海洋场景下越来越受到关注。
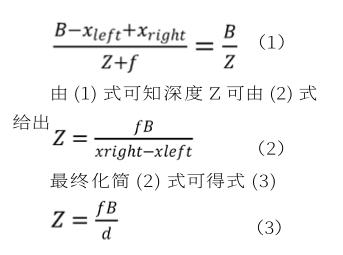
由以上计算过程可知双目测距精度主要取决于基线长度以及图像分辨率等因素。
3.海上双目采集实验
本次实验中所使用双目视觉实验装置如图3所示,包括无人艇移动采集平台,工业摄像机,图像采集计算机等部分。
4.立体匹配计算
双目视觉系统中的图像立体匹配(stereo correspondence)是获得场景深度信息的关键,立体匹配的目的是在左右视图中找出相应的匹配点,并且计算出视差,从而生成视差图像(disparity map),Scharstein D所提出的立体匹配过程包含四个部分,即匹配代价计算、代价支持聚合、视差计算最优化以及视差校正。本文算法结构如图4所示。
对于匹配代价计算而言,常用的算法有灰度相关绝对误差和(SAD),误差平方和(SSD),本文使用SAD算法对左右视图进行匹配实验,对于图像灰度相关计算而言,左右视图灰度不一致会使立体匹配计算难以取得理想效果,因此需要对图像进行预处理以减少这种亮度差异,增强纹理特征。其中SAD的匹配计算过程如图5所示,在极线搜索空间内使用滑动窗口在极线上计算与参考图像匹配距离,匹配度量公式如式4所示。
5.实验与总结
对海洋场景下所采集立体图像对运用本文算法进行立体匹配计算,生成场景下的视差视图,并将结果映射到三维空间,对场景中三处物标度量其空间距离与激光测距结果相比较,图像采集结果如图6所示。
对双目测距结果与激光测距结果相比较,结果如表1所示,对应的距离与误差曲线如图7所示。


参考文献:
[1]Bertram V.Unmanned surface vehicles-a survey[J].Skibsteknisk Selskab,Copenhag en,Denmark,2008,1:1-14.
[2]Cyganek B,Siebert J P.三维计算机视觉技术和算法导论[M].陆军,懂晓睿,译.北京:国防工业出版社,2014.
[3]张如如.基于双目立体视觉三维重建方法的研究[D].聊城大学,2018.
[4]Scharstein D,Szeliski R.A taxonomy and evaluation of dense two-frame stereo correspondence algorithms[J]. International journal of computer vision,2002,47(1-3):7-42.
