基于机动检测的自适应IMM目标跟踪算法
2019-05-23邓丽颖
邓丽颖,陈 磊
(中国电子科技集团有限公司第三十八研究所,安徽 合肥 230088)
0 引 言
机动目标跟踪是雷达数据处理中的关键环节,实现精确稳定的跟踪需要有效地抑制量测误差,精确估计目标的运动参数,其难点在于目标运动方式的不确定性[1]。若采用的运动模型与目标实际的运动模型不匹配,将导致滤波器的估计精度下降,甚至会造成滤波器发散。
根据目标不同的运动状态,常用的运动模型有匀速运动模型、匀加速运动模型、Singer模型和当前统计模型等。对于出现转弯、急停等高机动性能的目标,匀速和匀加速运动模型无法适用于其运动状态。Singer模型和当前统计模型均为机动目标自适应的跟踪算法,Singer模型把机动控制项作为相关噪声建模,认为目标的加速度是具有指数自相关的零均值随机过程,而当前统计模型是一种具有自适应非零均值加速度的Singer模型[2]。但如何选取正确的机动频率是采用Singer模型和当前统计模型面临的问题。因此单一的模型无法描述目标复杂时变的运动过程[3]。
本文提出了一种基于机动检测的自适应交互式多模型算法,通过交互式多模型算法根据目标的机动和未机动的运动状态自适应调整CV模型和Singer模型的模型概率,其中Singer模型参数可根据目标的强弱机动等级自适应地调整,仿真结果表明了该算法的有效性。
1 数学模型
1.1 CV模型
CV模型,即匀速运动模型。目标做匀速直线运动时,加速度为零。由于存在随机扰动,可以将目标的加速度看作是随机噪声产生的结果,如下式所示:
(1)
式中:w(t)为均值为0、方差为q的高斯白噪声:
E[w(t)]=0
(2)
E[w(t)w(t+τ)]=q2δ(τ)
(3)
取系统的状态变量为:
(4)
则系统的连续时间状态方程为:

(5)
将式离散化得到系统离散时间状态方程为:
x(k)=FCVx(k-1)+WCV
(6)
式中:FCV为CV模型状态转移矩阵,表达式为:
(7)
其过程噪声WCV具有协方差QCV为:
(8)
1.2 Singer模型
Singer模型又称为时间相关模型,它用有色噪声对机动加速度建模。假设目标机动的加速度a(t)为一个平稳的时间相关随机过程,其时间相关函数表达为:
(9)


该模型采用Kalman滤波进行目标跟踪时,需要对有色噪声白化处理,白化后的相关函数Ra(τ)为:

(10)

取系统的状态变量为:
(11)
则系统的连续时间状态方程为:
(12)
离散化得到系统离散时间状态方程为:
x(k)=FSingerx(k-1)+WSinger
(13)
式中:FSinger为Singer模型状态转移矩阵,表达式为:
(14)
其过程噪声WSinger具有协方差QSinger为:
(15)

1.3 基于机动检测的自适应参数Singer模型
Singer模型通常将机动频率和加速度方差取为常数,若目标作不同等级的机动,固定的机动频率和加速度方差将不能匹配于目标的真实运动情况。以机动频率为例,当目标的实际机动频率小于模型设定的机动频率,跟踪会出现延迟,导致强机动、急转弯跟不上,进而造成目标的丢失;当目标的实际机动频率大于模型设定的机动频率,会引起系统的状态误差增大,导致跟踪不稳定。一般通过对目标的机动检测来实现模型参数的自适应,本文采用跟踪滤波时的归一化残差,来判断目标的机动等级,根据机动等级的强弱来自适应地调整Singer模型的机动频率和加速度方差的取值。
采用Kalman滤波对目标进行跟踪,取雷达站心系下XYZ方向上的位置、速度和加速度为状态变量:
(16)
则系统的状态方程为:
x(k)=Fx(k-1)+W
(17)
式中:F为状态转移矩阵;W是协方差为Q的过程噪声。
取雷达站心极坐标系下目标的距离、方位和仰角作为量测量:
z=[RAE]T
(18)
则系统的量测方程为:
z(k)=Hx(k)+V
(19)
式中:H为量测矩阵;V是协方差为R的量测噪声。
在k时刻系统的残差d(k)为:
(20)
式中:ΔR、ΔA和ΔE分别为预测的距离、方位和仰角与量测之差。

(21)
通过计算每一时刻的归一化距离,来判断每一时刻的机动状态,再根据不同的机动等级来调整Singer模型的机动频率和加速度方差的取值,从而实现模型参数的自适应调整。
2 交互式多模型算法
在进行目标跟踪时,目标常常存在多种运动状态,采用单一的模型往往不能匹配目标时变的运动特性,也不能保证固定的模型参数长期可靠,因此通常采用多模型的估计理论,通过建立多个模型来逼近目标复杂时变的运动过程。本文采用的是交互式多模型算法(IMM),相比于传统的多模型算法,IMM算法将系统视为有限状态的Markov链,不同模型间通过转移概率进行交互,模型转移符合Markov过程。设每个子模型为线性跳跃的Markov系统:
(22)
本文将CV模型和基于机动检测的自适应参数Singer模型组成模型集,模型间的跳变满足Markov转移概率矩阵:
(23)

(1) 输入交互
假设系统在k-1时刻匹配的模型为i,并在k时刻发生跳变为模型j,则此时的转换概率为综合Markov转移概率以及量测条件下的后验概率的混合概率:
μij(k-1/k-1)=
(24)

因此,可通过该转移概率初始化每个模型在k时刻的输入:
(25)
(26)
(2) 模型滤波

(27)

(3) 模型概率更新
采用Bayes假设检验法计算当前时刻模型概率,检验各个模型的滤波残差。若k时刻匹配为模型j,则其模型j的滤波残差rj(k)为零均值、方差为Sj(k)的高斯白噪声,似然函数可表示为:
(28)
那么k时刻匹配为模型j的概率为:
(29)
(4) 输出综合
将各子模型的估计结果进行加权融合可得到系统最终的状态估计:
(30)
(31)
3 仿真研究
假设目标在XY平面内做水平机动,目标的初始方位30°,初始斜距15 km,初始速度为400 m/s,过正北向西南方向飞行。目标仿真时间150 s,在0~70 s和110~150 s内做匀速直线运动,在70~110 s内发生转弯,最大机动加速度为9g,最大径向速度为600 m/s。采样的数据率1 Hz,仿真的轨迹如图1所示。
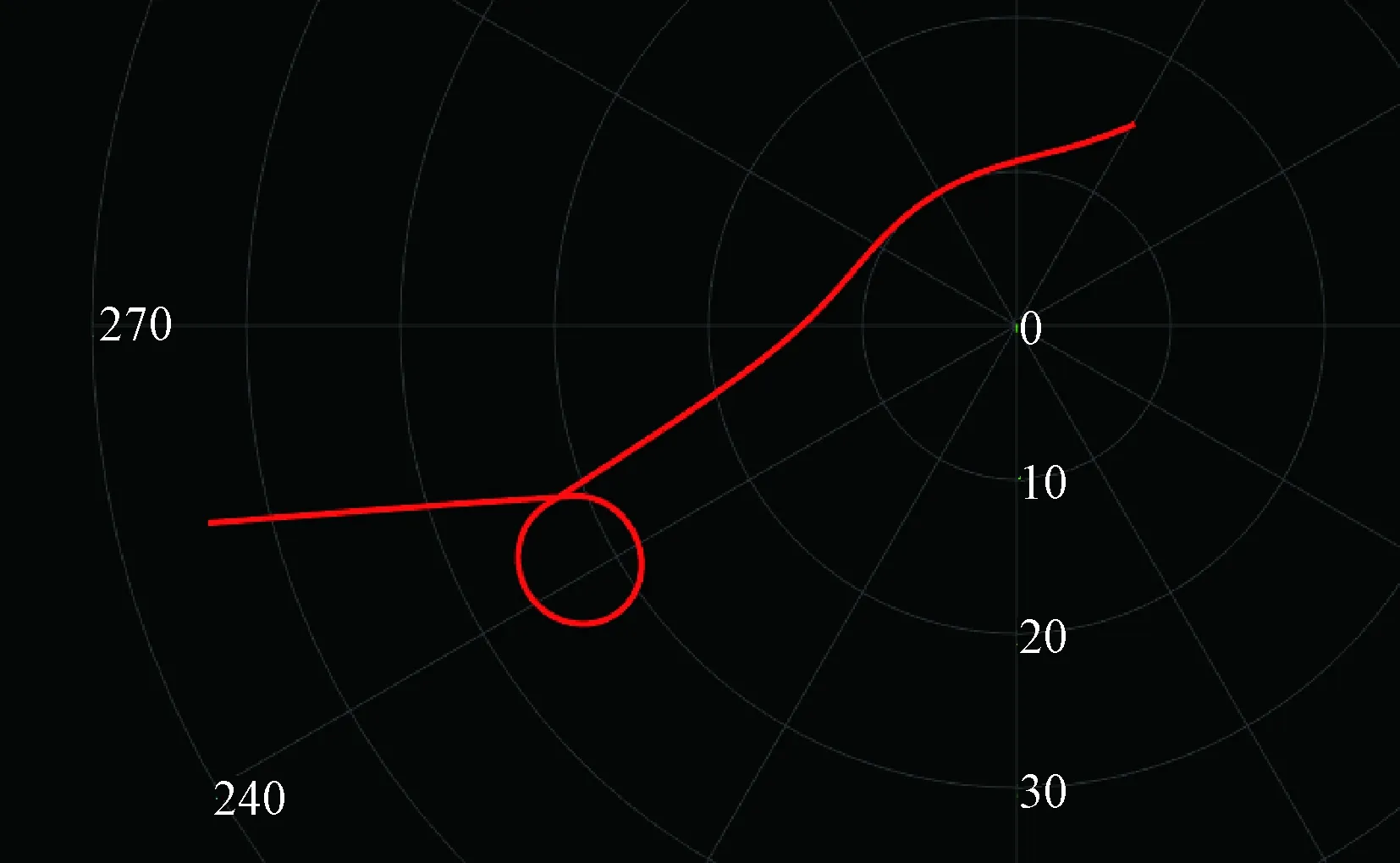
图1 仿真目标真实轨迹
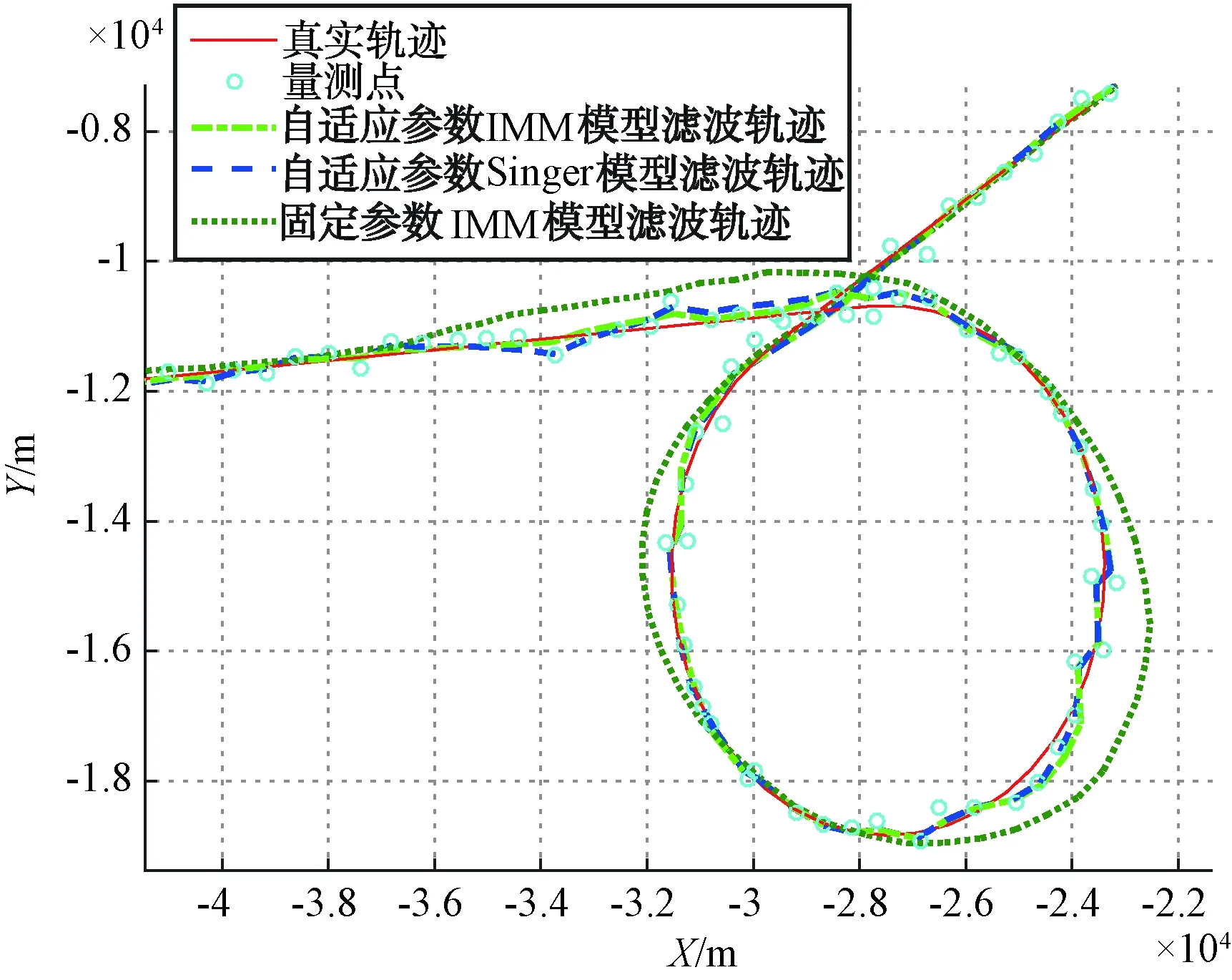
图2 不同算法滤波点轨迹
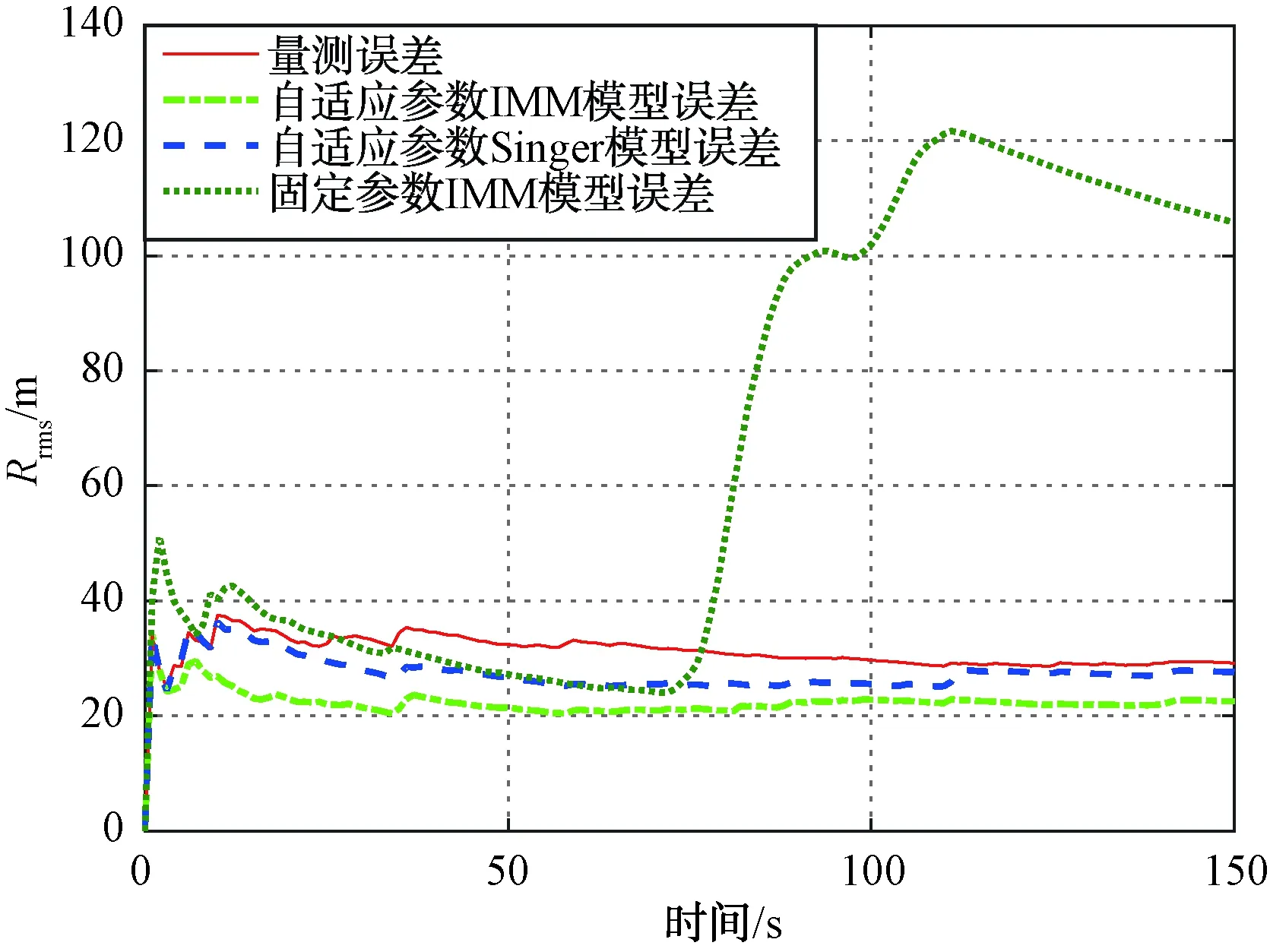
图3 不同算法距离均方根误差比较图

图4 不同算法方位均方根误差比较图
由图2可得,采用固定参数的IMM模型在70 s目标开始机动时,跟踪结果出现延迟,跟不上目标的机动转弯,距离和方位的均方根误差也开始发散,最终的距离均方根误差为105.829 3 m,方位均方根误差为0.822 3°。这是因为在70 s时目标的机动性能增强,目标实际机动频率小于模型中设定的机动频率,导致机动转弯跟不上。因此固定参数的IMM模型,不能随着目标的机动状态实时地调整模型参数,无法对机动性能发生改变的目标进行稳定跟踪。
当采用基于机动检测的自适应IMM算法时,相比于单个Singer模型算法的跟踪结果,IMM模型的跟踪更稳定,如图3、图4及表1所示。其估计的距离和方位的均方根误差都小于单个Singer模型算法的均方根误差。这是因为IMM模型中包含了CV模型和Singer模型,能根据目标的运动状态,实时地调整模型概率,选择与目标运动更匹配的模型。综上,相比于单个Singer模型算法和固定参数IMM算法,本文提出的基于机动检测的自适应参数IMM算法的跟踪结果更好。
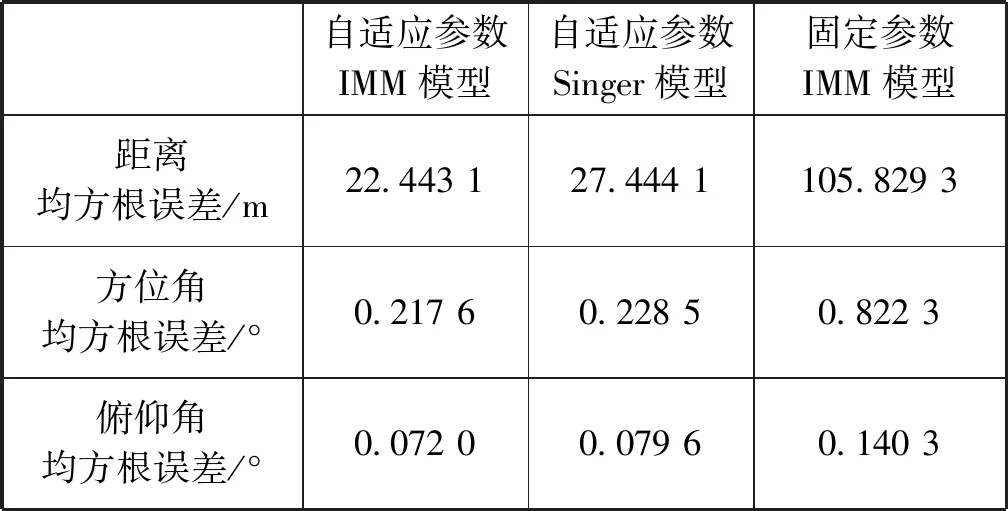
表1 不同算法跟踪结果均方根误差表
4 结 论
本文采用了一种基于机动检测的自适应交互式多模型算法,通过IMM算法根据目标的机动和未机动的运动状态自适应调整CV模型和Singer模型的模型概率。同时,针对目标机动时,存在不同的机动等级这一问题,采用基于归一化残差的机动等级判断,根据目标的强弱机动等级自适应地调整Singer模型的机动频率和加速度方差的取值,有效地提高了机动目标的跟踪精度,实现了机动目标的稳定跟踪。