基于平面靶标的三维测量数据拼接方法
2019-05-22韩伟峰高金刚
韩伟峰,王 华,何 航,张 爽,高金刚
(1.中车长春轨道客车股份有限公司工程技术部,长春 130062;2.长春工程学院,长春 130012; 3.长春工业大学机电工程学院,长春 130012)
0 引言
视觉测量技术作为当今高新技术之一,在测量领域中应用得越来越广泛[1],而针对列车转向架的大尺寸测量参数的测量,单目视觉的视野受到限制,无法完成测量,因此,在实际测量中通常利用多目视觉进行测量,并且通过三维数据拼接就将各个子区域的测量数据统一到世界坐标系中,其精度在整个视觉测量中有着重要影响。
当前常用的三维数据拼接方法主要有:通过经纬仪[2]、三维扫描仪[3]、激光跟踪仪[4]等设备实现三维点云数据的拼接,但本类设备较笨重、价格高昂、操作较复杂;通过标记点进行三维拼接的方法,需要有共同的视场,并且无法适用于表面易损害的工件;另一种类的方法是通过ICP算法及其改进算法[6],但这些算法存在计算量大,运行时间长等问题。
本文提出了一种基于大尺寸标定板的数据拼接方法。首先,在标定板上建立中间坐标系,然后,将每个摄像机坐标系作为各自的局部坐标系,并至少求出3个非共线标记点在中间坐标系和局部坐标系下的空间坐标;最后,获取坐标系之间的变换矩阵,经过两次坐标变换后,即可求出局部坐标系之间的转换关系。
1 三维数据拼接原理
1.1 多视觉传感器结构关系模型
为实现测量目的,建立多目视觉测量系统(两组双目测量系统),如图1所示。选取多目视觉测量系统中的一个双目测量系统其中的一个摄像机坐标系作为局部坐标系Pc1和Pc2。将标定板放置在两组双目测量系统的公共区域内,以标定板的中心点作为原点,取标定板的垂直水平面作为Z轴,标定板的两侧外边缘分别作为X、Y轴,构建一个中间坐标系Pb。

图1 多视觉传感器结构关系图
1.2 各个坐标系之间的转换
确定局部坐标系和中间坐标系之间转换矩阵:
(1)

(2)
1.3 求出转换矩阵

(3)
将不同坐标矢量代入转换方程中即可得:
(4)
(5)

(6)
2 实验结果
为验证本实验方案,采用四台工业相机MER-040-60UM及16 mm镜头作为多目视觉传感器,以300 mm×300 mm的高精度标定板作为被测目标,多目视觉传感器与标定板的摆放位置如图2所示。

图2 多视觉传感器结构实物图
将摄像机进行编号,然后两两分组,分别组成双目视觉测量系统。采用Halcon软件中的标定工具箱标定出两相机之间的内外参,将标定板在两相机的公共视野中摆放18次。为了更好地得到相机的畸变结果,首先将标定板沿着视野边缘摆放9次,然后使标定板倾斜一定角度再摆放9次。多目视觉测量系统的最终标定结果见表1~2。

表1 多目视觉测量系统中的摄像机内参

表2 摄像机之间的转换矩阵
双目测量系统采集标定板上的多个(3个及以上)非共线的实心圆,提出其圆心作为标记点,如图3所示。通过计算所获取的标记点在局部坐标系和中间坐标系的空间坐标,根据式(5)和式(6),能够求出两坐标系之间的转换矩阵,进而求出各局部坐标系之间的转换矩阵,见表3。
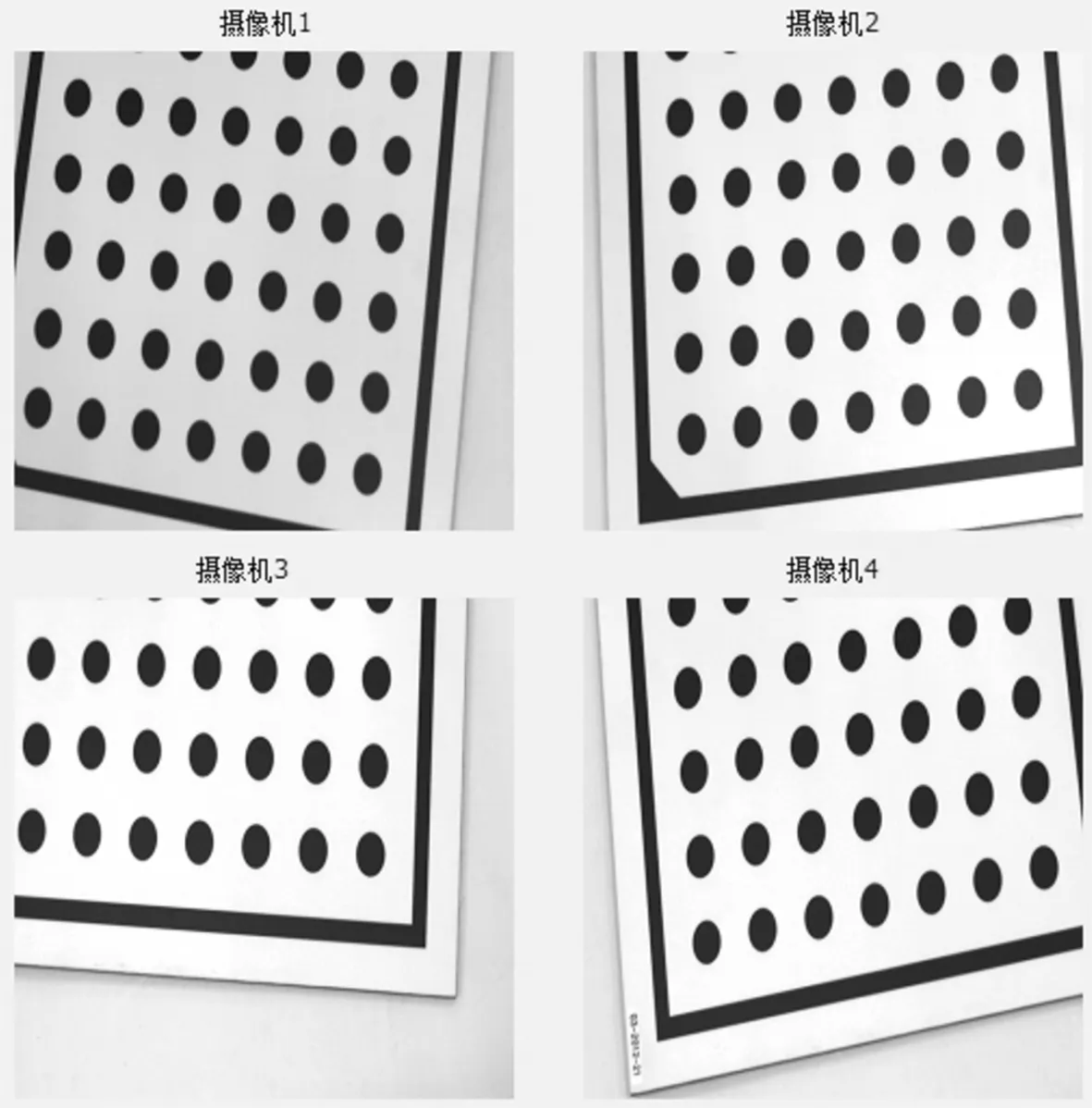
图3 各摄像机拍摄的标定板图

表3 各坐标系间的转换矩阵
3 数据拼接
本文利用共同视野下的大标定板圆心,实现数据的拼接。每个子摄像机分别获取该摄像机所拍摄的标定板上的圆心坐标,选取其中一个摄像机坐标系作为基准坐标系,即世界坐标系。通过矩阵间的变换关系,可将其他子摄像机的测量数据转换至同一坐标系下,即坐标系的统一,最终实现数据的拼接,如图4~5所示。


图4 每个子区域测量的圆心坐标

图5 数据拼接结果
4 误差分析
通过求解标定板上的圆心间距离,验证本文所述拼接方法的精度。通过对标定板取不同距离,分别求解出局部坐标系及世界坐标系下对应的位置关系,见表4。实验结果表明:误差值随圆心距增加而增大;在世界坐标系下的圆心距误差大于局部坐标系下的圆心距误差。
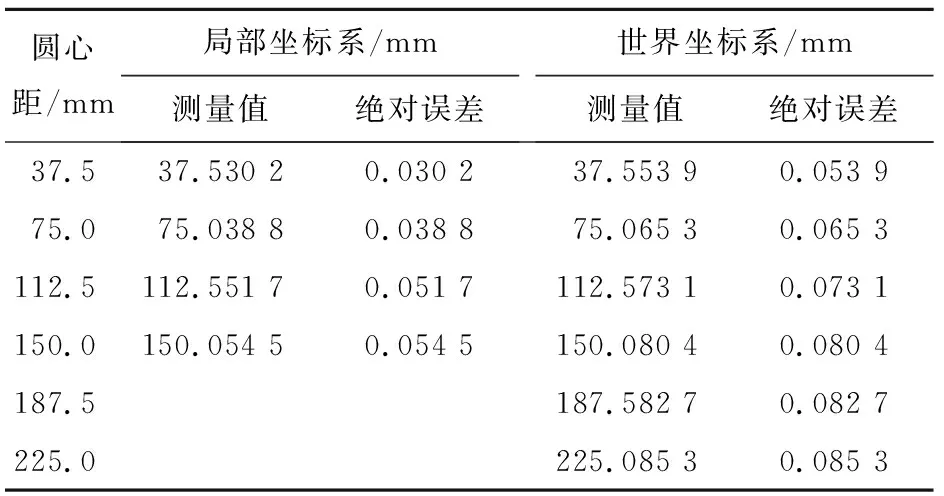
表4 误差分析
5 结语
针对列车转向架的大尺寸参数测量,提出了一种基于大尺寸标定板的数据拼接方法,即在公共视野下存在大面积平面靶标完成三维数据的拼接的方法。通过实验表明:该方法简单易行,精度较高,适用于企业生产的现场要求,且成本较低。本文所述方法仍有不足,对标定板精度要求较高;当视觉传感器视场增大时,被测目标需增大,增加成本。