星站差分GPS在远海打桩定位中的应用
2019-05-22陈士清
陈士清
(中国铁建港航局集团有限公司 广东珠海 519000)
1 引言
风能作为一种可再生的无污染的优质能源,越来越受到世界许多国家的重视。海上风力发电是优化能源结构、推动产业升级的重要举措,是实施能源可持续发展战略的重要内容之一[1]。
目前海上风力发电已由近岸向离岸50 km、水深50 m的远海方向发展。风电场建设初期需要设立测风塔对风能参数进行收集。常规GPS-RTK技术,虽然定位精度能够达到厘米级,但其作用范围一般不超过15 km[2],CORS站网外覆盖一般不超过30 km,无法满足超过其基站信号覆盖范围以外区域。因此,针对风电测风塔这样的远海项目的施工测量,利用星站差分GPS技术加以解决,以满足远海施工测量对定位时效性和精度等方面的要求。
2 GPS定位技术简介
2.1 常规RTK/RTD技术
RTK(Real-Time Kinematic)技术就是测绘上通常说的载波相位差分技术。其原理是经由数据通信链路实时将基准站的坐标和GPS接收机接收的载波相位观测值等信号传输给流动站(用户站),流动站GPS接收机将接收到的载波信号和基准站传输来的载波相位观测值实时差分处理,消除大部分误差,得到较为准确的相对于基准站的三维坐标差值,再顾及基准站坐标,可实时得到准确的流动站的三维坐标,从而实现厘米级的定位精度[3]。
RTD(Real Time Differential)也是一种相位差分技术,其定位原理与RTK基本相同,只不过RTD是实时处理动态码(C/A码、P码)的技术。RTD的定位精度在1~5 m内是比较稳定的[4]。
2.2 网络RTK/RTD技术
网络RTK又称作多基站RTK。是基于CORS基础上的实时差分定位技术,与传统的单基站RTK作业相比较而言,其主要有覆盖范围广、网内定位精度均匀(不像传统单基站RTK,定位精度随着离基准站距离越远定位精度越低)、定位精度高和单机即可作业等优点[5]。
网络RTD(Real Time DGPS),是多基站RTD技术。流动站定位时,考虑了多个基站对差分信号改正数的共同作用,因此系统可靠性显著增强,同时定位精度也明显提高[6]。目前,全国最大信标差分系统是由中国沿海的20个永久性差分站组成的海事差分系统,在近岸区可以获得亚米级精度的平面坐标[7]。
2.3 星站差分原理
通常RTK提供的单点定位精度并不高,因此,产生出了设立基准站,向移动站发送差分改正数据,以提升移动站相对定位精度的模式,有效地将测量精度提升至厘米级。
但是当遇到海洋、沙漠等不宜设立基准站,或是投入产出比过小的环境时,就要考虑实际可行的增强方法,因此,星站差分系统即利用卫星替代RTK基站就应运而生。
星站差分系统是通过设立在全球的GPS固定观测站组成的观测网,连续跟踪GPS卫星,将影响各卫星的误差源描述为独立的误差因子并加以解算。解算结果经由Inmarsat卫星数据通讯链路发射,直接发送到使用星站差分系统的接收机用户。因此,在地面不需要设置基站,可在收到信号的全球任何位置进行测量定位[8]。
2.3.1 星站差分系统组成
星站差分系统由参考站、数据处理中心、注入站、用户站和地球同步卫星等五部分组成[9]。
参考站上双频GPS接收机时刻接收来自GPS卫星发射的信号,接收的数据即时传送至数据处理中心,经数据处理中心处理后生成的差分改正信号,再经数据通讯链路传送至注入站,最后由注入站传送至Inmarsat同步卫星,然后向全球播发。
用户站上的GPS接收机除有一个接收机接收GPS卫星信号外,实际上还有一个称作为L波段通信接收器的装置,接收通过Inmarsat卫星播发的L波段的差分改正数据。在GPS测量时应用这些差分改正信息,实时定位精度就得到显著的提高。
2.3.2 常用的星站差分服务
现今,市场上已经有Veripos、StarFire、OmniSTAR三家得到广泛的应用。
(1)Veripos
在全世界设立了超过80个参考站的Veripos系统属于Subsea7公司,在英国Aberdeen和新加坡建立了控制中心。Veripos提供五种定位服务。
Veripos提供服务的水平精度在北纬76°到南纬76°之间可优于10 cm(95%)。
(2)StarFire
StarFire网络隶属于美国NAVCOM公司,是于1999年建立的广域差分系统。它在全球范围内发布GPS差分信号,它提供了具有99.99%的联机可靠性的分米级的定位精度的服务。它提供WCT、RTG两种服务,定位精度分别为35 cm和10 cm。NAVCOM公司提供的SF3050/SF3040两类GPS接收机,可分别满足海洋与陆地对定位的要求。
(3)OmniSTAR
在全球设有100多个地面参考站的高精度GPS增强系统OmniSTAR原属Fugro公司,2011年3月交于美国Trimble公司运营,3个控制中心站分别位于美国、欧洲和澳大利亚,分析和处理各参考站传送来的数据,将经分析确认后的差分改正数据通过数据通讯链路传送到注入站上传至同步卫星播发给用户,以达到实现实时定位高精度的目的。
OmniSTAR系统和市场上与之竞争的类似系统相比较,其主要优势在于提供的服务信号覆盖的地理范围更大。目前,在OmniSTAR信号有效作用范围内,可实现单机实时定位优于10 cm(CEP)的定位精度。OmniSTAR提供四种服务:VBS、XP、HP、G2。
OmniSTAR-VBS提供精度优于0.7 m(2σ95%)的单频DGNSS信号服务。
OmniSTAR-HP/XP/G2是OmniSTAR信号服务家族中的双频增强服务解决方案。OmniSTAR-HP/XP/G2通过许多单独的定位技术发送亚厘米精度的信号服务。
几种服务具有以下特点:
OmniSTAR-VBS提供的是亚米级精度的服务。在2σ(95%)置信水平下,平面位置偏差优于1 m。只要收到OmniSTAR DGPS差分信号,很快收敛。
OmniSTAR-XP服务提供短期几英寸和长期重复性优于20 cm(95% CEP)的精度。它稍微比HP精度低,它在全世界范围内可用,在测量方面,与地域性差分系统(如WAAS)相比,精度有所提高。
OmniSTAR-HP服务在2σ(95%)的置信度下的平面位置偏差优于10 cm,在3σ(99%)置信度下,平面位置误差优于15 cm。
XP/G2不依赖于参考站,收敛时间是20 min内,在中国区域的水平方向精度是20~30 cm,尤其高程方向的精度是20~30 cm。
HP/G2的精度依赖于参考站,水平精度达到5~10 cm需要的收敛时间为20~30 min,高程方向精度是10~20 cm。
综上所述,使用星站差分GPS技术,用户不需要在作业区附近设立基站,但具有定位精度接近传统的RTK的优点,同时具有GPS定位所具有的全天候、连续性等特点,为远海工程的测量提供了实用可行的技术解决方案。
3 打桩船测量定位系统改进
3.1 GPS打桩定位系统构成
GPS-RTK打桩定位系统一般采用三台GPS仪器,在控制船位的同时控制船姿。为精测桩位坐标,船上还安装两台精密测距仪,布置如图1所示。同时,集成的测量系统软件具有通信、数据采集、计算、显示,数据存储和报表打印等功能[10]。
3.2 系统改进
为满足海上测风塔打桩定位的需要,根据实际情况,选用星站差分技术,对现有打桩船定位系统进行改造,以满足打桩定位对时效性和精度等方面的要求。
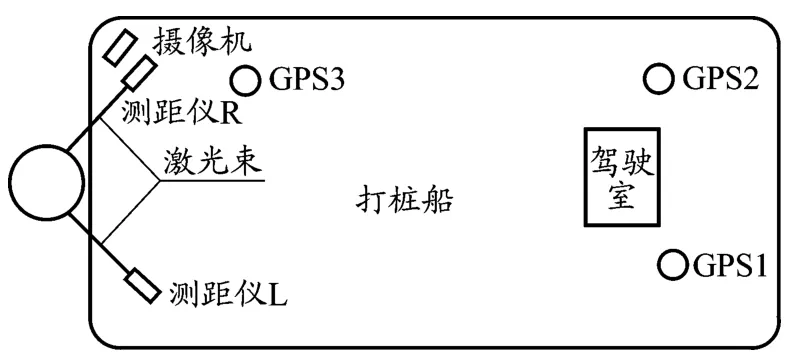
图1 GPS-RTK打桩定位系统设备构成
3.2.1 硬件方面
“铁建桩01”打桩船上原有GPS打桩定位系统采用的是三台LEICA GS10接收机。改为星站差分定位方式后,由于LEICA GS10无法开通SEASTAR远海定位功能,根据实际情况,通过比选采用一台天宝(TRIMBLE)SPS855流动站定位,安装在图1中GPS2的位置,开通SEASTAR-HP服务,一台TRIMBLE SPS461双天线GPS定向,安装在图1中GPS3的位置,实现远海GPS打桩定位。
其他硬件如计算机、室外天线固定件、连接线路等通用的部分继续保留。
3.2.2 软件方面
定位系统改造由原定位系统设计与开发的同济大学测量与国土信息工程系进行,对原GPS打桩定位系统进行升级改造,与现有星站差分测量方式相匹配。船型尺寸、GPS接收机相对位置关系等参数没有变动的可以沿用。
3.3 定位原理
因为本次改进只采用一台TRIMBLE SPS855开通SEASTAR-HP功能进行定位,为了准确推算坐标和定出方位,增加了TRIMBLE SPS461作定向用。因SPS461没有开通HP服务,为提高定向精度,系统集成时,同时把SPS855作为基准站,和SPS461组成1+1RTK组合,这样SPS461的坐标也有与基站相近的精度(因为两机相距很近)。
这样根据两台GPS接收机和打桩船的船型几何关系和有关参数,根据接收机的实时坐标和桩架传感器、船体横倾和纵倾等实时传感数据,就可实时推算出桩位设计标高处的中心坐标。
3.4 定位精度
SPS855开通SEASTAR-HP功能进行定位,平面精度可以达到5~10 cm,高程精度10~15 cm,数据收敛时间足够长的情况下,平面精度及高程精度可以达到5 cm以内。
SPS461具有双天线定向功能,在两台天线距离10 m情况下定向精度可以达到0.05°[11]。
4 工程应用实例
4.1 工程概况
福建长乐海上风电场测风塔建筑与安装一期工程Ⅰ标段,在长乐外海H区及A区设立2座桩基型式测风塔。长乐H区测风塔基础由4根钢管桩组成,呈正方形布置,桩顶相邻间距为14 m。各单桩倾斜度为10∶1,单根管桩桩长125 m,直径2 m,上部12 m壁厚36 mm,其余部位壁厚27 mm,单桩重约175 t。长乐A区测风塔基础由4根钢管桩组成,呈正方形布置,桩顶相邻间距为13 m。各单桩倾斜度为10∶1,单根管桩桩长101 m,直径2 m,上部6 m壁厚36 mm,其余部位壁厚27 mm,钢管桩内部采用十字形劲板进行加强,钢板厚度为18 mm,其中变径段加强长度为3 m,泥面以下加强长度为21 m。单桩重约155 t。
Ⅰ标段沉桩检验标准为:桩顶标高允许偏差(+0,+50)mm,桩顶平面位置允许偏差≤150 mm,斜度允许偏差≤1%,桩顶间距允许偏差≤300 mm,以标高控制为主,贯入度校核。
本工程平面坐标系统为1980国家平面坐标系,中央子午线经度120°;高程系统为1985国家高程系。
4.2 海上打桩的实施
4.2.1 系统参数设置
(1)坐标转换参数。从业主方得到测区6个测量控制点资料(见表1)经复测确认无误后,用GPS接收机采集6个控制点的大地坐标,计算出坐标转换参数(见表2)[12]。
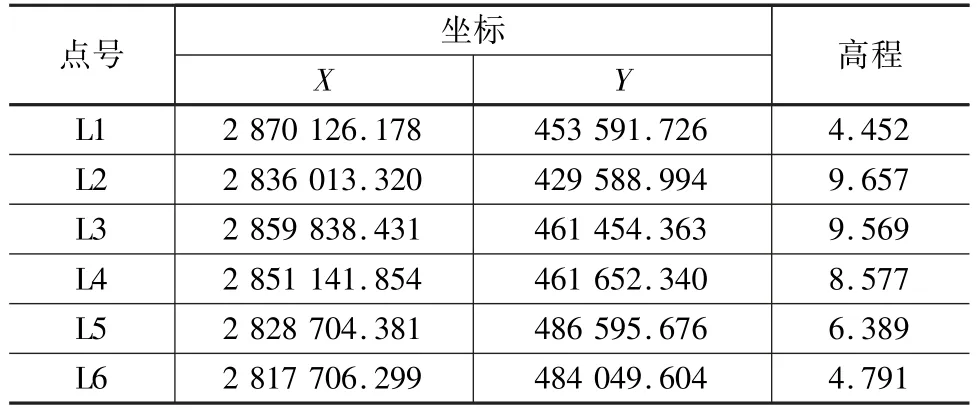
表1 控制点坐标 m
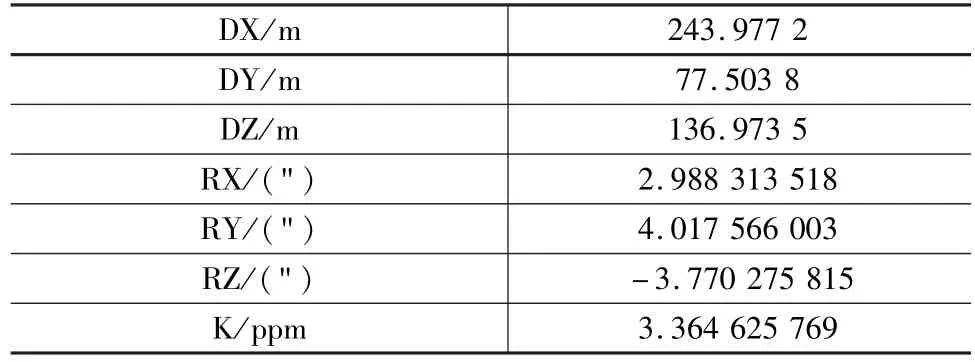
表2 布尔莎七参数
(2)船型长宽尺寸、GPS接收机固定点与船轴线等平面相对位置关系、与测距仪的空间位置关系等。这些参数是在打桩船停靠在水面比较平静的码头测得,作为固定参数设置到打桩定位系统软件中。
(3)画笔颜色、系统限值分别根据操作者和技术规范要求设置。
4.2.2 设备参数
(1)GPS接收机和测距仪在打桩船上安装的空间位置,它们之间的相对位置关系。
(2)船体和桩架测倾仪纵横向加常数。
(3)上述设备的通讯端口及波特率。施工区域使用的卫星参数。点击“Omnistar”里“配置”,根据服务商提供的频率和比特率输入,其他不需改动,确定后保存。
4.2.3 设计桩位坐标
按打桩定位系统软件指定格式,将桩的设计坐标及其相关信息制定成excel表格,然后转换成文本格式导入系统软件中。
4.2.4 沉桩
在操作室安装有“GPS打桩定位系统”监视器上点击打开海工之星软件,根据前述设置好参数,建立项目文件,进入打桩定位功能。
从桩位资料中按顺序选取准备沉放的桩号,点击编辑,查看数据无误后确认。监视器屏幕上显示船头桩的实际位置、船的姿态和设计桩位,船上指挥人员依据屏幕上显示的船位和设计桩位,指挥操作人员移船和收放桩架,直至桩的平面位置、扭角及斜率与设计值的偏差在设计和规范允许的范围内,此时可以指挥下桩、打桩[13]。
在定位系统监视器旁边另有一个监视器,通过安装在打桩船前部的一个摄像头查看桩的下沉情况。摄像头两侧有两个测距仪,获取测距仪到桩的距离推算桩中心的坐标,测距仪的位置数据在设备参数里已设置好。
定位过程中经常查看GPS接收机位置状态和Omnistar位置状态信息。在接收机位置状态中查看几何精度因子(DOP)大小,可以知道定位精度高低和卫星分布情况。图2是OmniSTAR HP服务数据收敛界面图。

图2 OmniSTAR HP服务数据收敛
桩顶标高是通过桩船前部测距仪发射到桩身上的红外激光点读取刻度,根据桩身上部的高度推算得出。
达到设计停锤标准后,点击定位系统中“停锤”功能。保存打桩定位记录,还可以对最后显示结果进行截屏备查。
4.2.5 沉桩结果
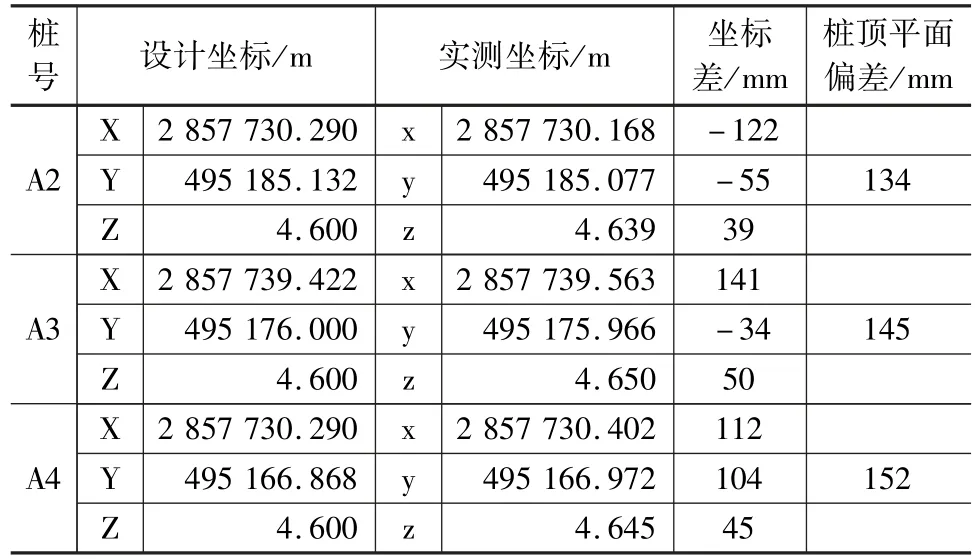
沉桩完成后用SPS855流动站对桩位坐标进行检测,检测结果见表3,最大平面偏差只有一个为152 mm,其余均满足规范要求,可见采用星站差分技术定位可以保证远海测量精度。
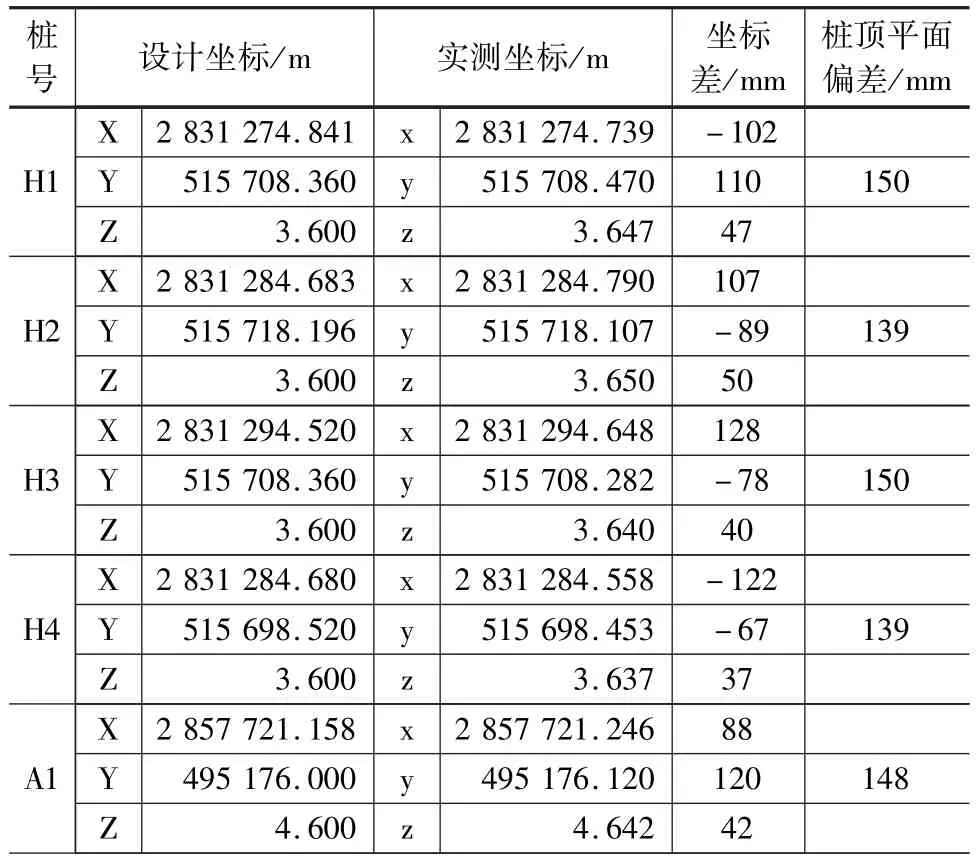
表3 桩位检测成果
续表3
5 结束语
海上风电在我国正处于发展时期,已经由近岸向更远的深海发展,无论是桩基结构的测风塔,还是后续风电场施工都离不开精准的定位,星站差分技术能够充分发挥其优势,在远海施工定位中大显身手。
(1)星站差分GPS技术解决了远海无法建立地面基站的GPS测量问题,实现了真正意义上的远海施工测控。
(2)星站差分GPS测量成本较高,开通此项功能每月需万元以上的服务费,工期不长可按月付费,如果施工时间长,可以按年付费。具备条件后的尽可能使用海上平台建立基站。
(3)OmniSTAR-HP信号服务由三颗卫星提供,在施工现场沉桩时卫星提供的信号质量不佳,可暂停打桩,测量人员更换提供星站差分信号的卫星或重新启动系统,重新接收信号,解算数据,减小误差。
(4)由于GPS打桩定位系统依靠一台SPS855进行定位,为保证定位正确,可以考虑增加一台开通HP服务的流动站进行校核。
