汽车电子驻车制动系统(EPB)驻车力研究
2019-05-20闵庆付阮文龙
闵庆付 阮文龙
(1.上海汇众汽车制造有限公司,上海 200000;2.浙江宏舟新能源科技有限公司,浙江 舟山 316000)
引言
近年来,在机动车制动系统领域中,电子驻车制动系统(EPB,Electrical Park Brake)由于其在市场应用中的便捷性与舒适性,越来越多的取代了传统的机械集成式驻车制动器(IPB)与盘中鼓式制动器(DIH)。
传统的机械集成式驻车制动器(IPB)与盘中鼓式制动器(DIH)结构通过手刹机构驱动拉索带动驻车机构,将驻车手刹力转换为制动器压紧到制动盘上的夹紧力。电子驻车制动系统(EPB)采用了导线进行信号传递,执行机构接受电信号指令来实现自动夹紧和释放功能。一些较为新型的电子驻车系统还能够通过传感器等自动感知和测算当前需要施加,并通过电控部件、电机等增加或减少制动力,从而极大地提高了驾驶员操纵车辆的舒适性。
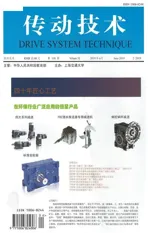
图1所示为电子驻车制动系统(EPB)驱动部件结构图。其包括电动机、减速机构和驻车制动器组成。当驾驶员按动电子驻车制动系统(EPB)按钮时,电子驻车制动系统控制模块接到来自按钮的信号,控制模块会向执行机构的电动机施加电流让其转动。电动机释放的转矩通过减速增扭机构将电机的速度减少、扭矩增大,然后通过输出轴螺纹副或滚珠丝杠副将电动制动单元输出的扭矩转化为直线推力,从而推动制动活塞运动将推力转化为制动块压紧至制动盘上的压力,进而完成实现车辆减少或驻车制动。
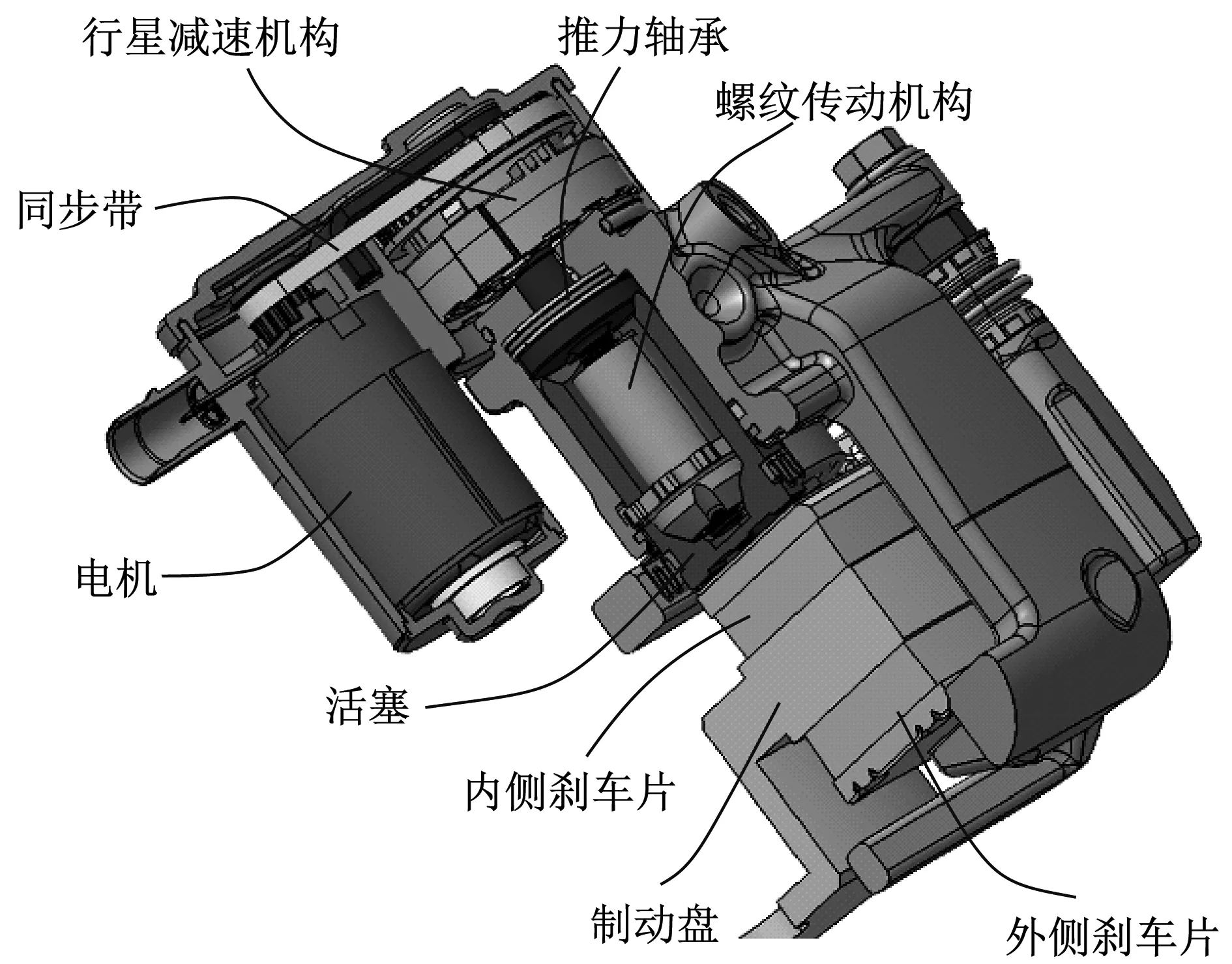
图1 EPB制动钳总成原理示意图
本文基于电子驻车制动系统(EPB)研究汽车实现不同坡度驻车制动所需要电流大小。通过对车辆驻车制动力、MGU和EPB制动器结构及原理分析计算需要电子驻车制动系统提供多大的电流。
1 整车参数

表1 目标车型的整车参数
2 极限驻车能力计算
车辆静止在坡道上,根据车辆的参数和驻车制动器的参数,以及路面和轮胎的摩擦系数,对其进行极限驻车能力计算。
车轮驻坡受力分析,如图2。
图2中:FZ1前轮的正压力;FZ2为后轮的正压力;FU2为后轮地面制动力;θ为车辆所处位置的坡度角;hg为重心高度;G为车辆的重力;L为轴距;φ为地面附着系数;a为重心距前轴的距离。
汽车在坡道上驻车情况如图2所示。对前轮与地面接触点取力矩,
图2 车辆驻坡受力分析图
Fz2L-Gsinθ·hg=Gcosθ·a
(1)

(2)
又因为汽车后轴车轮附着力Fr与制动力相等
(3)
由(2)、(3)上式可得汽车在上坡路上停驻时的坡度倾角θd为:
(4)
同上,下坡路上停驻时的坡度倾角θd为:
(5)
因此,空载、满载时汽车可能停驻的极限上、下坡倾角见表2。
表2 空载、满载时车辆上、下坡极限驻坡倾角
Table 2 Maximum parking ramp of uphill and downhill of vehicles when GCW or GVW

空载上坡下坡附着系数μ坡度倾角θ驻坡度(%)坡度倾角θ驻坡度(%)0.514.1025.1211.4520.260.617.1630.8913.4223.850.720.2836.9415.2827.310.823.4243.3117.0430.64满载上坡下坡附着系数μ坡度倾角θ驻坡度(%)坡度倾角θ驻坡度(%)0.515.4427.6212.4722.110.618.7733.9914.5826.020.722.1540.7016.5829.770.825.5347.7718.4633.38
3 活塞夹紧力计算
根据汽车停驻在20%的坡度上计算:
(4)
整理得:
(5)
式中,μ——摩擦系数
F——夹紧力,[N]
保证EPB驻车力不得低于常态目标力和极限目标力。
常态目标力:12~16 V的工作电压,-20 ℃~40 ℃的工作温度的条件下,EPB需要保证的驻车力;应用时需要保证常态目标力≥车辆满载30%驻坡所需活塞夹紧力×a(一般a取1.1)。
极限目标力:9~16 V的工作电压,-20 ℃~70 ℃的工作温度的条件下,EPB需要保证的驻车力;应用时需要保证常态目标力≥车辆满载20%驻坡所需活塞夹紧力×a(一般a取1.1)。
因此,空载、满载时汽车在20%和30%驻坡所需要的夹紧力见表3。
表3 空载、满载时在20%和30%驻坡夹紧力
Table 3 Clamping force at 20% and 30% ramp when GCW or GVW 单位:N
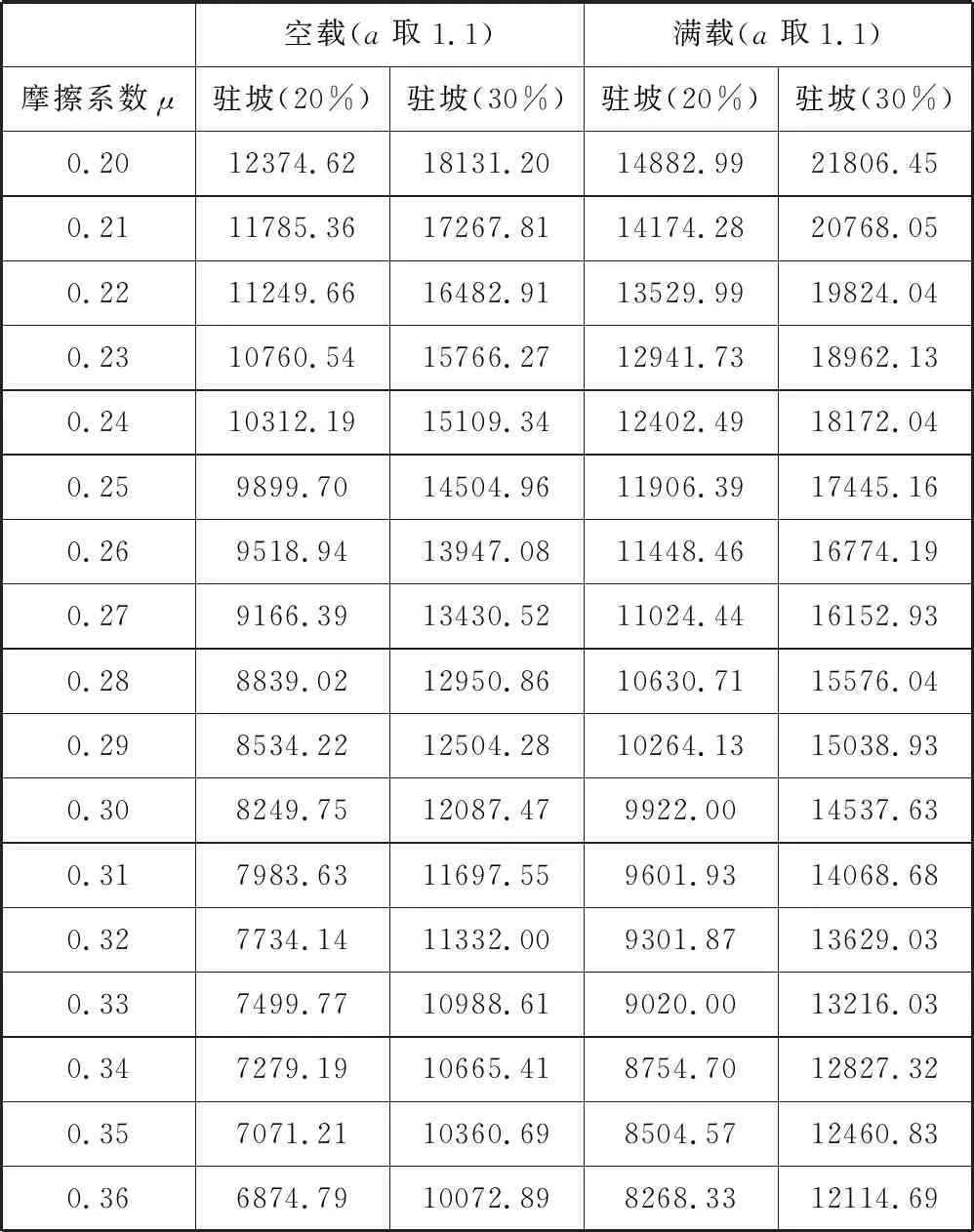
空载(a取1.1)满载(a取1.1)摩擦系数μ驻坡(20%)驻坡(30%)驻坡(20%)驻坡(30%)0.2012374.62 18131.20 14882.99 21806.450.2111785.36 17267.81 14174.28 20768.050.2211249.66 16482.91 13529.99 19824.040.2310760.54 15766.27 12941.73 18962.130.2410312.19 15109.34 12402.49 18172.040.259899.70 14504.96 11906.39 17445.160.269518.94 13947.08 11448.46 16774.190.279166.39 13430.52 11024.44 16152.930.288839.02 12950.86 10630.71 15576.040.298534.22 12504.28 10264.13 15038.930.308249.75 12087.47 9922.00 14537.630.317983.63 11697.55 9601.93 14068.680.327734.14 11332.00 9301.87 13629.030.337499.77 10988.61 9020.00 13216.030.347279.19 10665.41 8754.70 12827.320.357071.21 10360.69 8504.57 12460.830.366874.79 10072.89 8268.33 12114.69
对车辆驻坡力评估一般要求,20%驻坡,最小摩擦系数0.25,根据上表活塞夹紧力≥11.91 kN;30%驻坡,名义摩擦系数0.36,根据上表活塞夹紧力≥12.1 kN。
4 卡钳输入扭矩计算
目前市场EPB制动钳主要采用两种传动方式,一种是螺纹传动,另一种是滚珠丝杆转动;这两种均属于螺旋转动,由螺杆与螺母组成,是通过螺杆和螺母的旋合传递运动和动力的。它主要是将旋转运动变成直线运动,以较小的转矩得到很大的推力。
螺纹传动的特点是:结构简单,加工方便;易自锁;螺纹有侧向间隙,反向时有空行程,定位精度和轴向刚度较差;摩擦阻力大,传动效率低;磨损快;滚珠丝杆传动的特点是:摩擦阻力小,传动效率高;结构较复杂,制造工艺要求高,成本较高;运动平稳,启动时无振动;寿命长;不自锁,要求自锁时需附加自锁装置。
考虑到成本和自锁,除了大陆采用滚珠丝杆结构外,其他制动器厂均采用螺纹传动结构。
本文主要对螺杆传动研究,螺纹参数如下:
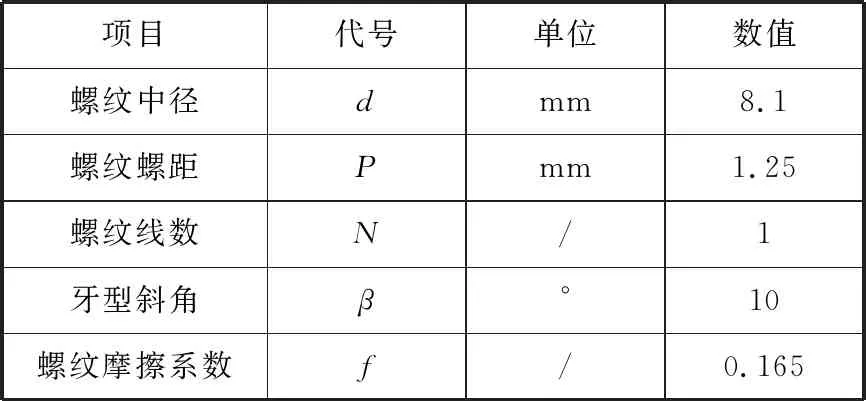
表4 螺纹传动的螺纹参数
对螺纹进行受力分析。
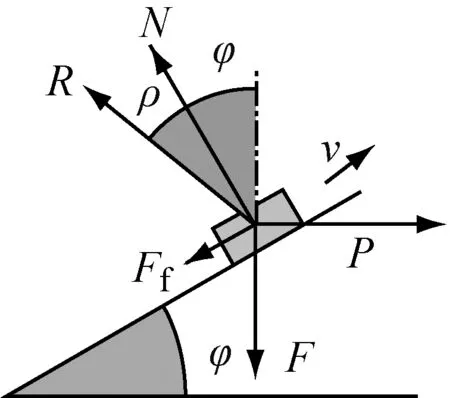
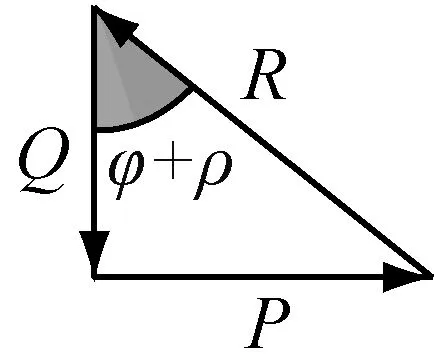
图3 螺纹受力分析图
螺纹力矩计算:
(6)
令f′=f/cosβ称当量摩擦系数。与当量摩擦系数对应的摩擦角称为当量摩擦角,用ρv表示。
螺纹升角计算:
φ=ctg(s/πd)=ctg(PN/πd)
(7)
将(7)代入(6)式可得螺纹力矩计算为:
(8)
式中,T1——螺纹力矩[Nm]
F——夹紧力,[N]
φ——螺纹升角,[°]
推力轴承力矩
(9)
式中,T2——推力轴承力矩[Nm]
d0——推力轴承滚针中经 [mm](滚针的中心位置,取22.6 mm)
μ——为推力轴承摩擦系数(带保持架滚针轴承:0.0020~0.0030,取0.0025)
由(8)、(9)上式可得EPB制动钳输入力矩T为:
(10)
因此,空载、满载时汽车在20%和30%驻坡所需要的执行机构输入力矩见表5。
表5 空载、满载时在20%和30%驻坡卡钳输入力矩
Table 5 Caliper input torque at 20% and 30% ramp when GCW or GVW 单位:Nm
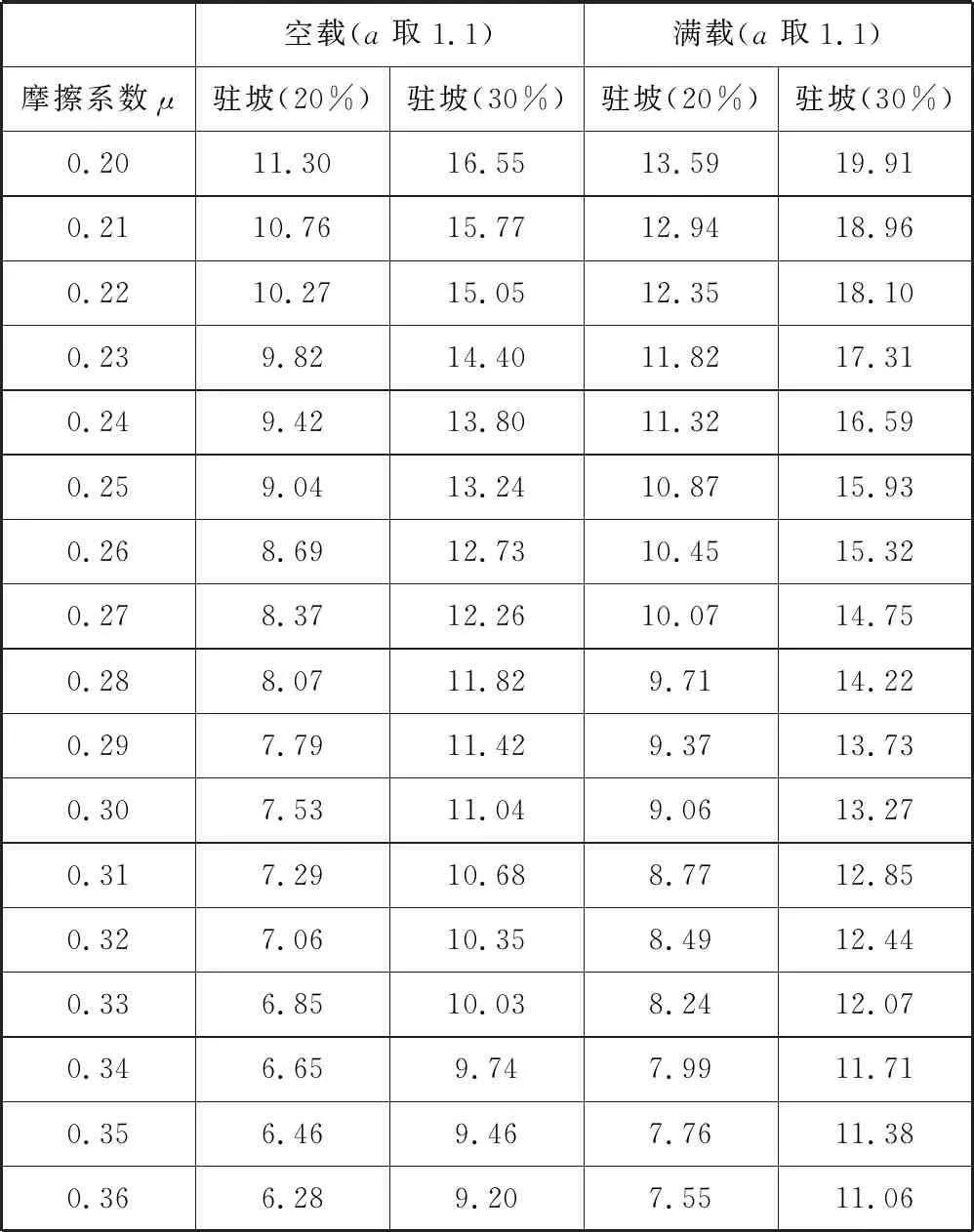
空载(a取1.1)满载(a取1.1)摩擦系数μ驻坡(20%)驻坡(30%)驻坡(20%)驻坡(30%)0.2011.30 16.55 13.59 19.91 0.2110.76 15.77 12.94 18.96 0.2210.27 15.05 12.35 18.10 0.239.82 14.40 11.82 17.31 0.249.42 13.80 11.32 16.59 0.259.04 13.24 10.87 15.93 0.268.69 12.73 10.45 15.32 0.278.37 12.26 10.07 14.75 0.288.07 11.82 9.71 14.22 0.297.79 11.42 9.37 13.73 0.307.53 11.04 9.06 13.27 0.317.29 10.68 8.77 12.85 0.327.06 10.35 8.49 12.44 0.336.85 10.03 8.24 12.07 0.346.65 9.74 7.99 11.71 0.356.46 9.46 7.76 11.38 0.366.28 9.20 7.55 11.06
5 电机输出扭矩计算
目前市场EPB执行机构主要采用两种减速机构,一种是行星齿轮减速机构,另一种是涡轮蜗杆减速机构;考虑到成本和自锁,除了大陆采用涡轮蜗杆减速结构外,其他制动器厂均采用行星齿轮减速结构。
执行机构除了采用行星齿轮减速机构,一级传动有采用同步带轮传动结构和齿轮传动结构。执行机构一旦结构确定,其减速比就确定了。该执行机构参数见表6。
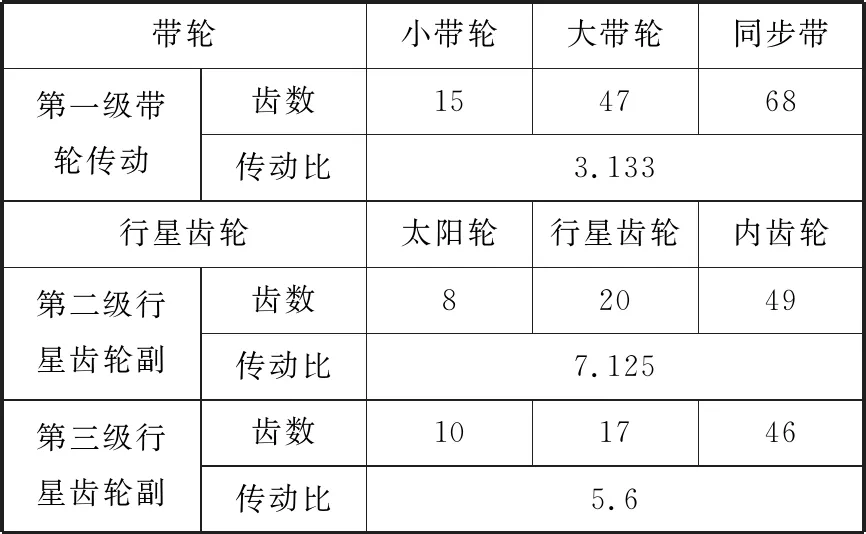
表6 执行机构参数
该执行机构是一级采用同步带传动机构,二、三级采用行星齿轮减速机构,总减速比是125∶1,经过试验验证,执行机构的传动效率为77.8%。
因此,空载、满载时汽车在20%和30%驻坡所需要电机输出力矩见表7。
表7 空载、满载时在20%和30%驻坡电机输出力矩
Table 7 Output torque of motor at 20% and 30% ramp when GCW or GVW 单位:mNm
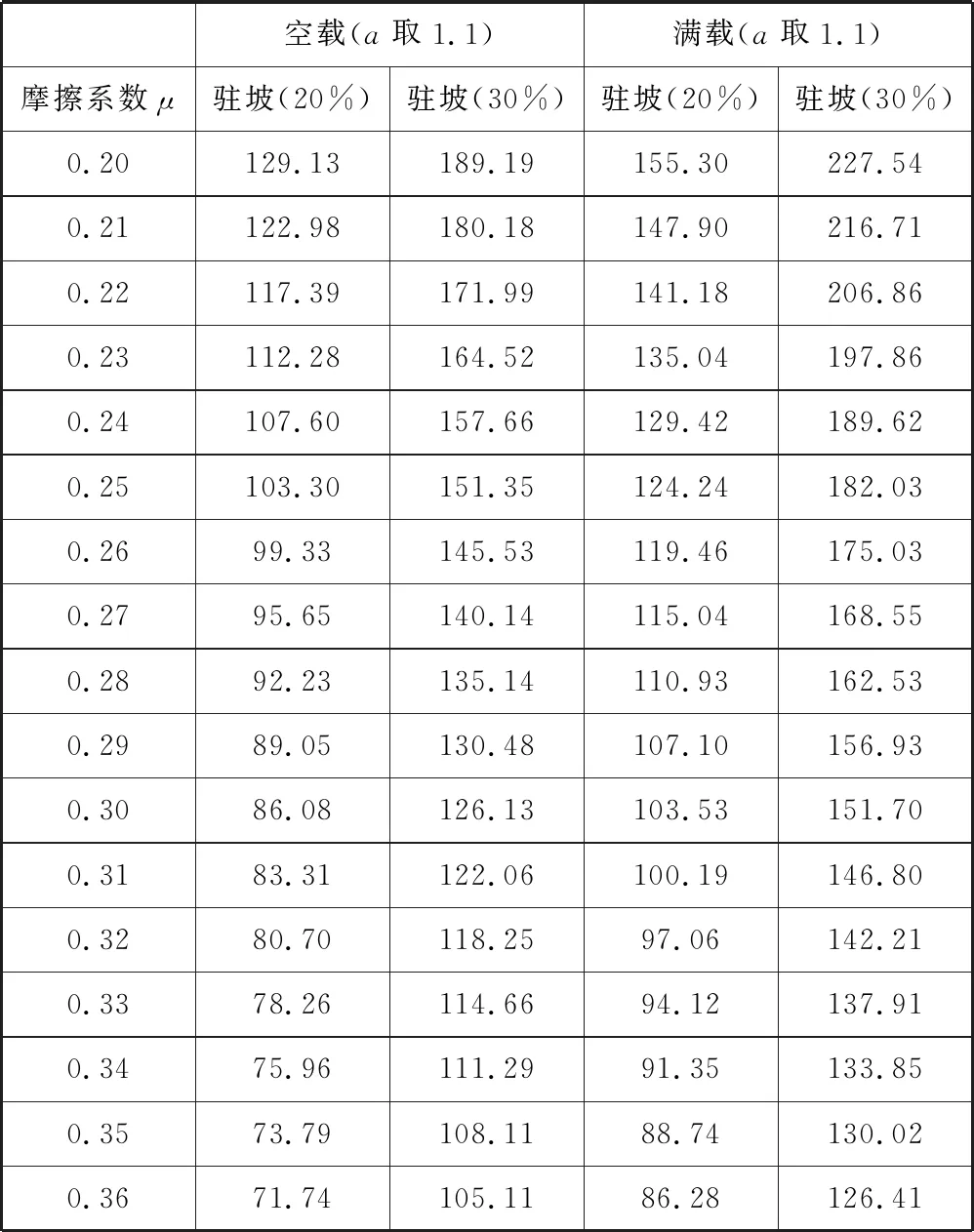
空载(a取1.1)满载(a取1.1)摩擦系数μ驻坡(20%)驻坡(30%)驻坡(20%)驻坡(30%)0.20129.13 189.19 155.30 227.54 0.21122.98 180.18 147.90 216.71 0.22117.39 171.99 141.18 206.86 0.23112.28 164.52 135.04 197.86 0.24107.60 157.66 129.42 189.62 0.25103.30 151.35 124.24 182.03 0.2699.33 145.53 119.46 175.03 0.2795.65 140.14 115.04 168.55 0.2892.23 135.14 110.93 162.53 0.2989.05 130.48 107.10 156.93 0.3086.08 126.13 103.53 151.70 0.3183.31 122.06 100.19 146.80 0.3280.70 118.25 97.06 142.21 0.3378.26 114.66 94.12 137.91 0.3475.96 111.29 91.35 133.85 0.3573.79 108.11 88.74 130.02 0.3671.74 105.11 86.28 126.41
电机输入电流计算
通常采用的电机主要有直流有刷电机、直流无刷电机、永磁同步电机。直流有刷电机有机械换向器,寿命有限,体积质量较大,转速较低,但价格低廉;无刷直流电机用电子元器件取代了碳刷,使得电机运行噪声小,寿命长,但增加了位置传感器,成本增加;永磁同步电机与直流无刷电机相比,转矩脉动小,调速范围高,电机结构也更加紧凑,但控制更加复杂。综合比较,选择价格较低的直流有刷电机作为动力电机。
目前市场上EPB所使用的主流产品为德昌、马步奇、捷和电机。根据EPB系统对夹紧时间、释放时间、以及夹紧力的等要求,电机必须满足如下要求,见表8。
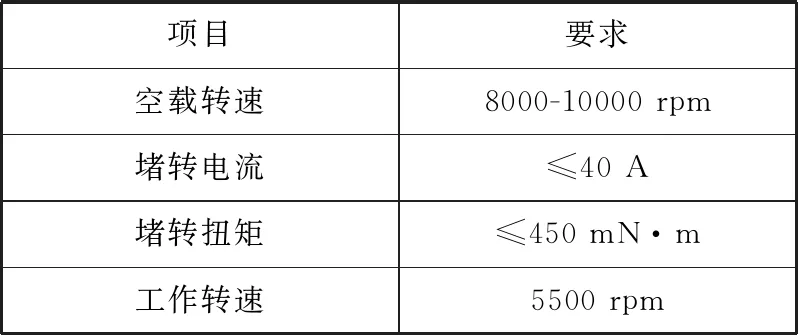
表8 电机选型要求
现选择一款满足要求的电机,型号为: RS-555VX-5524,电机在额定电压为12.0 V,室温( 25 ℃)情况下,其参数见表9。

表9 电机特性参数
空载转速(N0)—指电机不受任何机械阻力或负载时的电压,在轴枝上测得的速度;
空载载电流(I0)—指在电机无任何负载的情况下测得的电流量;
堵转转矩(Ts)—指因加载引致电机停止旋转时测得的转矩;
堵转电流(Is)—指在电机因过载而停止旋转时测得的电流量。
该电机允许工作温度范围在-40 ℃~85 ℃,在不同提交条件下的电机的性能计算:
无负荷转速:
(11)
堵转电流:
(12)
堵转扭矩:
(13)
负荷电流:
(14)
负荷扭矩:
(15)
负荷转速:
(16)
根据摩擦材料最小摩擦系数μmin0.25,驻坡坡度为20%的所需要的夹紧力进行举例计算,在使用电压:9.0 V~16.0 V;温度:-40 ℃~+85 ℃条件所需要的电流大小;在20%坡道上扭力为124.24 mNm下的电流见表10。
表10 在20%坡道上驻坡不同温度、电压下所需电流
Table 10 Required currents at different temperatures and voltages on the 20% ramp 单位:A
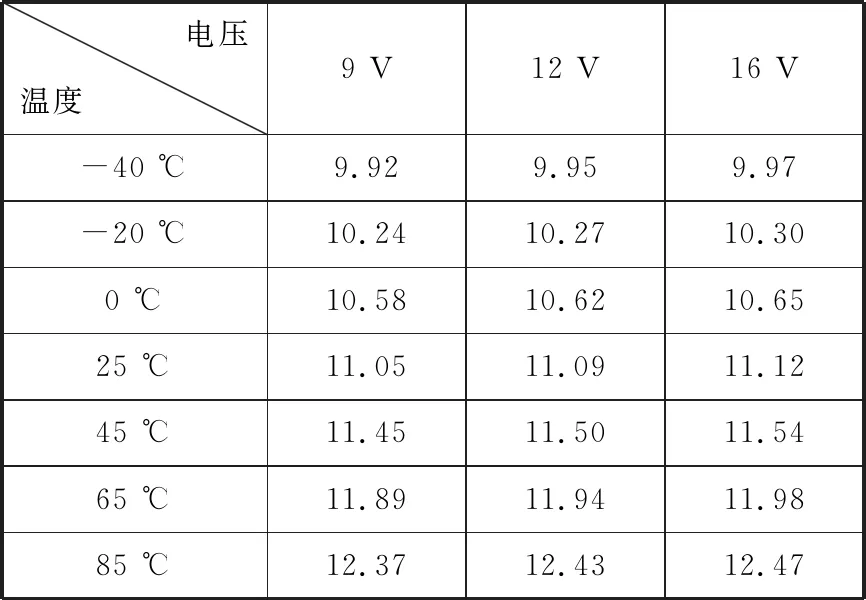
电压温度9 V12 V16 V-40 ℃9.929.959.97-20 ℃10.2410.2710.300 ℃10.5810.6210.6525 ℃11.0511.0911.1245 ℃11.4511.5011.5465 ℃11.8911.9411.9885 ℃12.3712.4312.47
6 EPB制动钳温度相关功能试验
实验在EPB综合性能试验台,如图4所示。
参照EPB温度相关功能试验方法,EPB卡钳达到11.91 kN目标夹紧力,进行夹紧释放动作,首先在常温下动作500次循环;将EPB卡钳放到温度箱,达到各温度后,保温2小时,然后进行动作,实时采集电流和夹紧力;记录目标夹紧力下的电流,测试数据见表11。

图4 EPB综合性能试验台
表11 在不同温度、电压下所需电流
Table 11 Required currents at different temperatures and voltages 单位:A
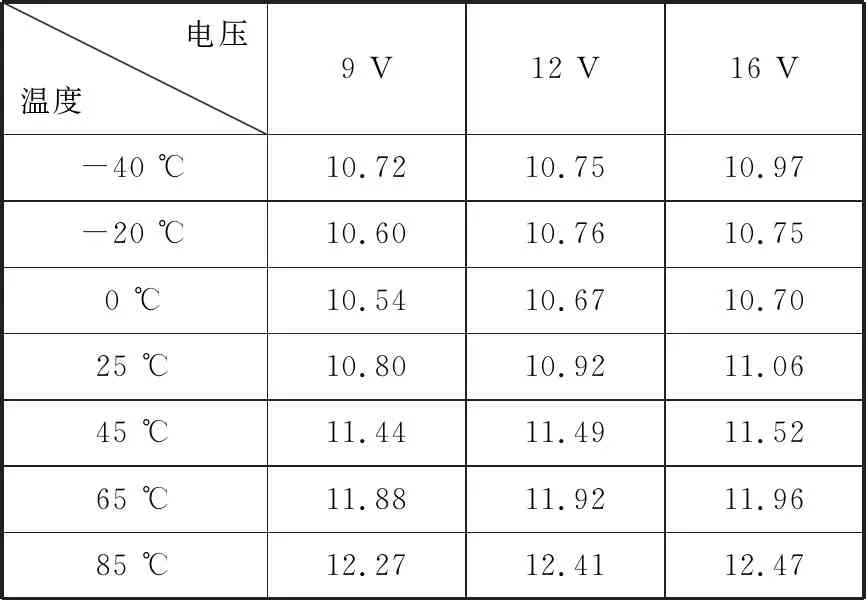
电压温度9 V12 V16 V-40 ℃10.7210.7510.97-20 ℃10.6010.7610.750 ℃10.5410.6710.7025 ℃10.8010.9211.0645 ℃11.4411.4911.5265 ℃11.8811.9211.9685 ℃12.2712.4112.47
7 结论
(1) 由于电机、执行机构在低温下空转电流增大导致电流偏大外,其他温度理论和实际检测数据是吻合的。
(2) 对集成式EPB传动机构、执行器、电机特性进行计算,为车辆驻坡与电流关系奠定了理论基础。
(3) 在EPB标定时,可以根据理论计算的最大电流设定截止电流。