基于智能驱动材料的水下仿生机器人发展综述
2019-05-17王延杰郝牧宇骆敏舟
王延杰, 郝牧宇, 张 霖, 骆敏舟
基于智能驱动材料的水下仿生机器人发展综述
王延杰1, 2, 郝牧宇1, 张 霖1, 2, 骆敏舟1, 2
(1. 河海大学 机电工程学院, 江苏 常州, 213022; 2. 河海大学 江苏省特种机器人技术重点实验室, 江苏 常州, 213022)
经过漫长的自然选择, 水生生物已进化出独特的结构和运动模式, 在水下生存具有得天独厚的优势。研究水生生物的运动方式并加以模仿, 同时将智能驱动材料应用于水下仿生机器人的结构和运动设计是目前水下仿生机器人的研究热点之一。结合水生生物和智能驱动材料的优点, 使得采用智能驱动材料设计的水下仿生机器人更易小型化、机动性更高, 可进行连续柔性运动, 从而实现在水下的复杂动作, 相较传统驱动方式具有显著优势。文中介绍了几种典型水生生物的运动机理, 比较了4种典型智能材料性能指标及其优缺点, 在此基础上综述了现有3种模仿水生生物推进方式的采用智能驱动材料设计的水下仿生机器人及其结构主要特点, 并对其运动效率进行了分析和比较, 指出了未来水下仿生机器人的发展需要解决的一些关键问题。
水下仿生机器人; 水生生物; 运动机理; 智能驱动材料
0 引言
随着人类对于海洋等复杂水域的探索愈加深入, 开发和应用能够在各种复杂水域环境执行危险或者人工难以完成的任务的水下机器人迫在眉睫。而水生生物具有多样化的身体结构以及出色的水下运动能力, 这使得他们能够在复杂的水下环境中生存。通过研究多种水生生物的形态学和运动方式, 从而获得灵感以模仿水生生物的推进方式来设计水下仿生机器人成为当前机器人领域的重要研究方向[1-3]。同时由于机器人在水下运动时需要模仿生物的运动来实现一些复杂的动作, 并且因水下环境的限制, 使得电机驱动的体积较大的机器人难以实现柔性连续运动, 其机动性和控制性能受到极大的制约[4-5], 因此, 以水下仿生功能为目标, 结合现有仿生结构、智能驱动材料以及先进的控制方式, 发展功能趋近水下生物的机器人成为了可能。
智能驱动材料是近20年来迅速发展的先进功能材料, 其具有外界刺激-响应的变形特性。不同于传统的“电机驱动+机械传动”的模式, 智能驱动材料可以实现“无机械关节的原位”驱动模式, 是一种极具代表性和发展潜力的驱动方式。现有智能驱动材料主要包括形状记忆合金/聚合物(shape memory alloy/polymer, SMA/SMP)、压电陶瓷、电活性聚合物(electroactive polymer)材料(又可细分为离子型和电场型, 离子型以离子聚合物金属复合材料(ionic polymer-metal composites, IPMC)为代表, 电场型以介电弹性体(dielectric elastomer, DE)材料最为典型)等[6]。随着材料机理及制备技术的发展, 智能驱动材料在水下仿生机器人上得到广泛应用。结合智能材料驱动器和各类水生生物推进方式而设计出的水下仿生机器人能够较好地实现连续柔性运动, 也更好地模仿了水生生物的推进方式。水生生物的推进方式各有特点, 相对应的不同结构设计也具有不同的性能和结构特点。文章综述了国内外近年来所研究的各类典型的水下仿生机器人, 分析了他们的运动机理、结构设计特点, 并对其运动性能进行了比较和分析。
1 水生生物运动机理
1.1 水母运动机理
水母身体呈伞形或倒置的碗状, 其身体向外凸出的一面称为上伞面(也称外伞面), 凹的一面称下伞面, 如图1所示[7]。水母的伞体内部存在着多种肌肉组织, 这些肌肉组织从伞体的顶端延伸到伞体的末端, 其控制着内腔体积的变化。当内腔扩张时, 水流进入腔体内; 当内腔收缩时, 腔体内的水被排出。水母利用伞体收缩排水反冲进行运动, 排水时产生的推力使水母沿身体轴向方向运动, 如图2所示[8-9]。
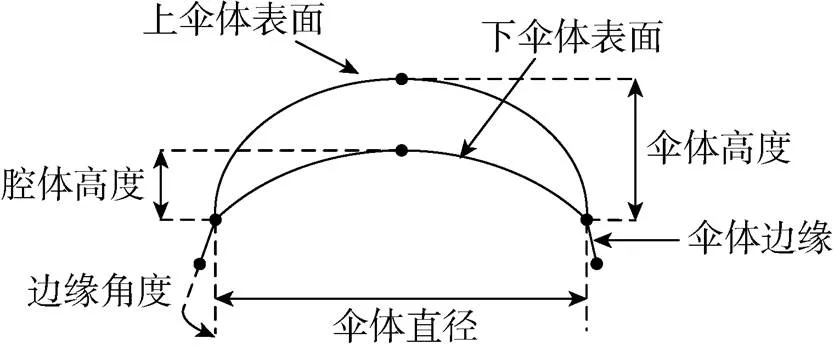
图1 水母结构简图

图2 水母在游动中的形态变化
1.2 乌贼运动机理
乌贼的游动运动采用鳍的波动和喷射推进两者相结合的方式来实现, 其身体结构如图3所示。通过鳍的波动运动, 可以实现慢速的游动和位置的保持, 快速的游动主要通过喷射推进来实现。乌贼的喷射推进过程主要包括了吸水和喷水两步骤。在吸水的过程中, 其外套膜扩张形成负压将水吸入, 充满外套膜腔; 喷水过程中, 外套膜收缩将腔体内的水喷出。吸水和喷水的过程相互交替, 通过喷水时形成的反作用力产生推动力实现运动[10-11], 如图4所示。
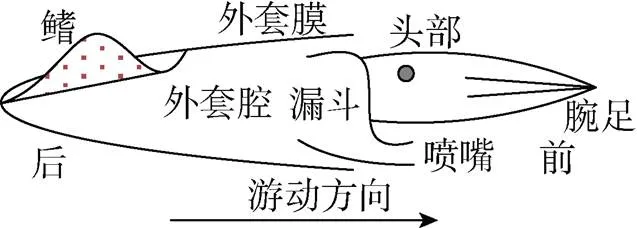
图3 乌贼结构示意图
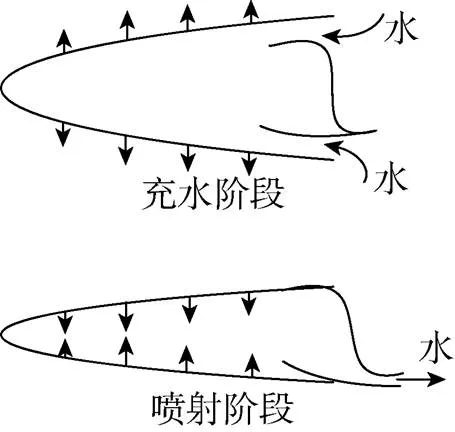
图4 乌贼运动过程示意图
1.3 鱼类游动机理
鱼类运动的推进方式可分为2种[12-14]: 1) 身体和/或尾鳍推进(body and/or caudal fin, BCF), 大部分鱼类采用此运动方式, 比如鳗鱼和鲹科的鱼类(如图5所示), 在BCF运动中, 鱼类身体肌肉收缩, 身体的起伏波动从身体前部向后传播, 并产生推动力, 如图3所示; 2) 中间鳍和/或对鳍推进(median and/or paired fin, MPF), 较少的鱼类采用此运动方式, 比如蝠鲼和鲀科[15]的鱼类(见图6和图7), 在MPF运动中, 主要通过鱼鳍的运动, 比如胸鳍进行拍翼运动等产生推进力。
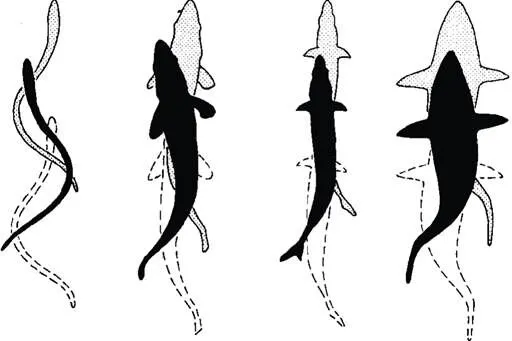
图5 采用身体和/或尾鳍推进方式运动的鱼类游动身体变化
2 智能驱动材料
现有的智能驱动材料主要包括形状记忆合金/聚合物、压电陶瓷和电活性聚合物材料等。这几种材料有着不同的驱动机理, 因此其驱动的性能也有所不同。形状记忆合金作为驱动器, 其优点为驱动电压小, 输出力大; 缺点是驱动频率低。由于形状记忆效应与温度变化相关, 使得其性能在温度变化较大的环境中会受到一定影响。IPMC材料作为驱动器有着驱动电压小, 驱动频率较快, 能量消耗少的优点, 但同时也存在因输出功率小使得机器人游动速度和推力相对较小的缺点; 压电材料作为驱动器, 其响应速度快, 输出力大, 但是需要较大的驱动电压。DE材料有着快速响应和大变形的优点, 但在应用中需要高驱动电压, 且需要经过预拉伸才能作为驱动器使用。上述智能驱动材料的具体性能指标见表1。
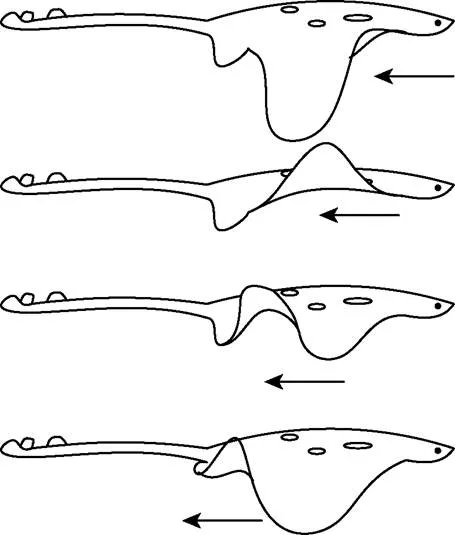
图6 蝠鲼在游动中的身体变化
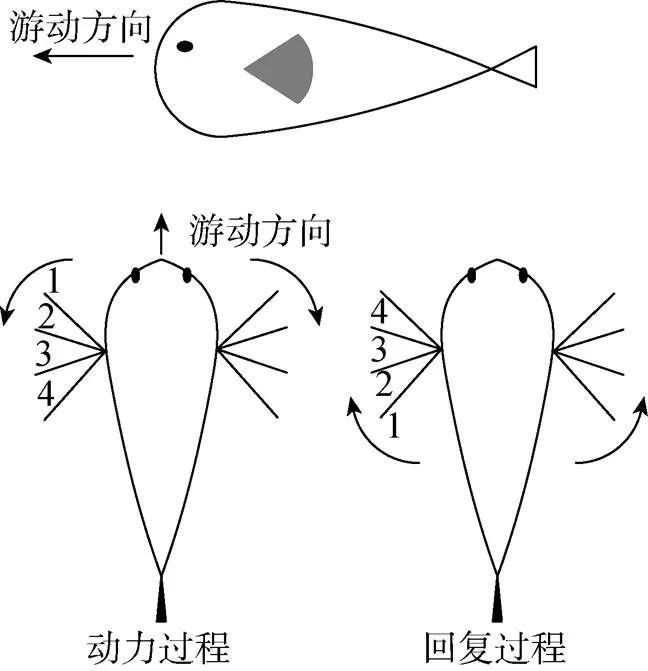
图7 鲀科在游动中胸鳍的运动
3 水下仿生机器人结构设计
3.1 仿生水母
关于仿生水母的研究至少可以追溯到10年前。2007年日本香川大学的Guo等[16]研究了采用SMA和IPMC共同驱动的仿生水母机器人(见图8(a))。其全部结构主要为4部分: 头部、4根触手、1根中间轴和薄膜, 整个结构呈轴对称形式。触手作为连接机构, 其一端与头部相连, 另一端为一块IPMC驱动器。触手通过SMA驱动器和中间轴相连(见图8(b))。机器人整体长75 mm, 质量6.5 g, 铃铛状身体最大直径55 mm, 移动方向长度46.1 mm, 最大速度6 mm/s, 即0.13BL/s(BL/s表示每秒行进的距离为体长的倍数)。圆形头部减小了在水中运动时受到的阻力, 中间轴用于保持运动平衡和稳定。SMA驱动器并不直接提供动力, 而是通过SMA驱动来实现对机器人伞体内部空间变化的控制以产生推力(见图8(c))。触手及其末端的IPMC驱动器起到类似船桨的作用, IPMC驱动器有节奏地弯曲, 实现机器人的姿态控制并提供一定的辅助推力。SMA驱动器和IPMC驱动器的协调运动可产生更大的推力, 并实现仿生水母机器人在水中的姿态控制, 包括上升、下潜和悬浮等。
美国弗吉尼亚理工学院的Villanueva等[17]对海月水母(Aurelia aurita)进行了形态学和运动学的分析, 并于2011年研究了一种基于SMA驱动器驱动的仿生水母机器人Robojelly。由于一般的SMA驱动器产生的形变不足以达到理想的要求, 故采用了一种仿生形状记忆合金复合材料(bioinspired shape memory alloy composite, BISMAC)驱动器, 其由SMA丝和弹簧钢嵌入硅胶中组成(见图9(a))。Robojelly由硅胶矩阵组成, 硅胶通过模具制造成水母的外形, 8个BISMAC驱动器嵌入到硅胶中, 绕轴线呈放射状布置。这8个BISMAC驱动器各自作为单独的系统连接到顶部的安装座, 该安装座用于固定BISMAC驱动器, 同时也用于容纳电路及电子设备。运动中, BISMAC因SMA丝变形而向内弯曲, 驱动单元的动作使得机器人的身体收缩, 减小了腔体内部的容积, 将腔体内的水排出以产生动力。机器人并未使用驱动器来完成由收缩状态恢复到放松状态这一过程, 因为在SMA丝变形使得机器人身体收缩时, 硅胶和弹簧钢在这个过程中也产生了弯曲变形储存了弹性势能, 当停止对SMA丝施加电压时, SMA丝的形变恢复, 硅胶和弹簧钢释放弹性势能, 机器人整体恢复到放松状态, 腔体内部容积增大, 水被容纳到腔体内, 以便机器人的下一次收缩变形排出腔体内的水产生动力(见图9(b)和(c))。该机器人的总体质量为242 g, 伞体直径为164 mm。在静水条件下每0.19 s产生1次推力, 和水母每0.25 s产生1次推力的频率相接近。当驱动频率为0.5 Hz时, 达到最佳的运动性能, 最大瞬时速度为54.2 mm/s(0.661 BL/s), 最大加速度达到34.01 cm/s²。
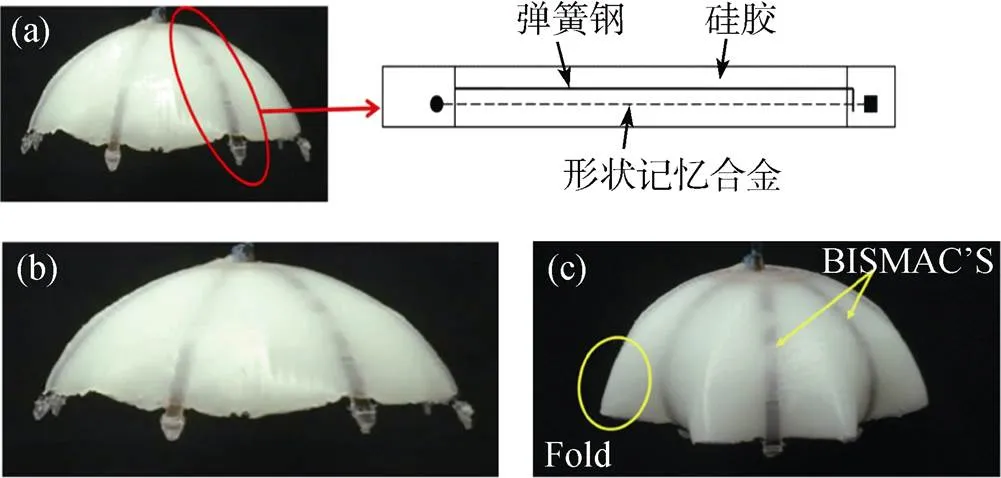
图9 采用仿生形状记忆合金复合材料驱动器的仿生水母机器人
以上列举的仿生机器人均采用水母的运动方式作为结构设计的基础, 并将SMA作为主要的驱动器来提供动力, 但两者在结构上还存在着一定的不同之处。图8中的仿生机器人虽然采用了智能材料作为驱动器, 但其整体结构仍是偏刚性的。而在图9中, 仿生水母的整个身体是由软体材料制造的, 与智能材料驱动器相结合能更好地实现柔性连续的运动。此外, 由于SMA材料本身的特性, 需要通过加热和冷却来达到一定温度产生变形, 因此不得不考虑水下环境和机器人的结构设计对驱动效果的影响。图9中SMA直接被包裹在硅胶材料中, 那么SMA加热到一定温度变形后再进行冷却恢复可能会需要较长的时间, 从而影响到SMA驱动器的驱动频率。图8中, SMA驱动器与水接触, 虽然冷却会更快, 但加热到产生形变所需温度的时间也变得更长, 这2种设计的驱动频率都不可避免地受到SMA材料特性的影响。存在的这些问题可以通过采用控制SMA通电时间的方式得到改善, 也就是说选取合适的占空比和频率来控制SMA加热和冷却时间的分配可以达到理想的驱动频率。
3.2 仿生乌贼
关于乌贼的特殊推进方式, 国内很早就开展了相关研究。2011年, 哈尔滨工业大学的王扬威等[18]根据乌贼喷射推进的原理研制了一种采用形状记忆合金丝驱动的仿生喷射推进器。该设计简化了乌贼的生物结构并对乌贼喷射运动的过程加以模仿。仿生喷射推进器的外形与乌贼相似如图10所示, 由仿生外套膜和漏斗组成(见图10(a))。仿生外套膜由硅胶浇注成型, 横截面为圆环状, 前部封闭, 后部开放, 通过外套膜的收缩和扩张, 能够实现充水和喷射, 漏斗安装在外套膜的开放端, 成锥形, 水流通过漏斗的窄口进出。筋条和SMA丝嵌入到仿生外套膜中, 筋条用于外套膜形状的维持。相邻的筋条由SMA丝连接(见图10(b)), 当对SMA丝施加电压时, SMA丝产生形变收缩, 带动两侧的筋条使其间距变小, 进而让整个仿生外套膜收缩, 减小腔内体积, 将水喷射出产生动力。当仿生外套膜放松时, 停止对SMA丝施加电压, 依靠收缩时硅胶外套膜所储存的弹性势能促使整个形状恢复到SMA丝通电前的状态。样机的仿生外套膜长为260 mm, 外部直径为110 mm, 质量为805 g。当SMA丝通电电流为18 A, 通电时间为2.5 s时, 最高游速可达58 mm/s (0.223 BL/s)。之后, Gao等[19]于2014年设计了一种推进速度更快、运动性能更佳的仿生机器人。该硅胶制成的仿生外套膜横截面半径为55 mm, 长度约230 mm, 其厚度为8 mm。沿硅胶体的长度方向嵌入了树脂玻璃条, 将其作为仿生外套膜的骨架。树脂玻璃条沿长度方向存在着一些等距的小孔, SMA丝穿过小孔沿圆周方向嵌入到硅胶体中, SMA丝的变形将带动外套膜的收缩。完整的仿生推进器包括了仿生外套膜、舱体、半圆形挡板、喷嘴和开关膜(见图11)。仿生外套膜固定在舱体上, 形成仿生外套膜腔。将开关膜与半圆形的挡板粘在一起, 并一起固定在舱体的前部, 确保仿生外套膜腔的密闭性。喷嘴固定在半月形挡板上, 通过控制喷嘴的弯曲来改变水流喷射的方向, 进而控制推进方向。运动过程中, 当仿生外套膜收缩时, 开关膜与仿生外套膜的内壁紧密接触, 此时水流从喷嘴喷射出产生推力, 当仿生外套扩张时, 开关膜向反方向弯曲打开一条窄缝, 让水进入腔体内部。整体的仿生推进器长度为250 mm, 宽160 mm, 高70 mm, 质量为728 g, 在25 V的驱动电压下, 达到0.82 Hz的喷射频率, 平均速度为87.7 mm/s(0.35 BL/s)。
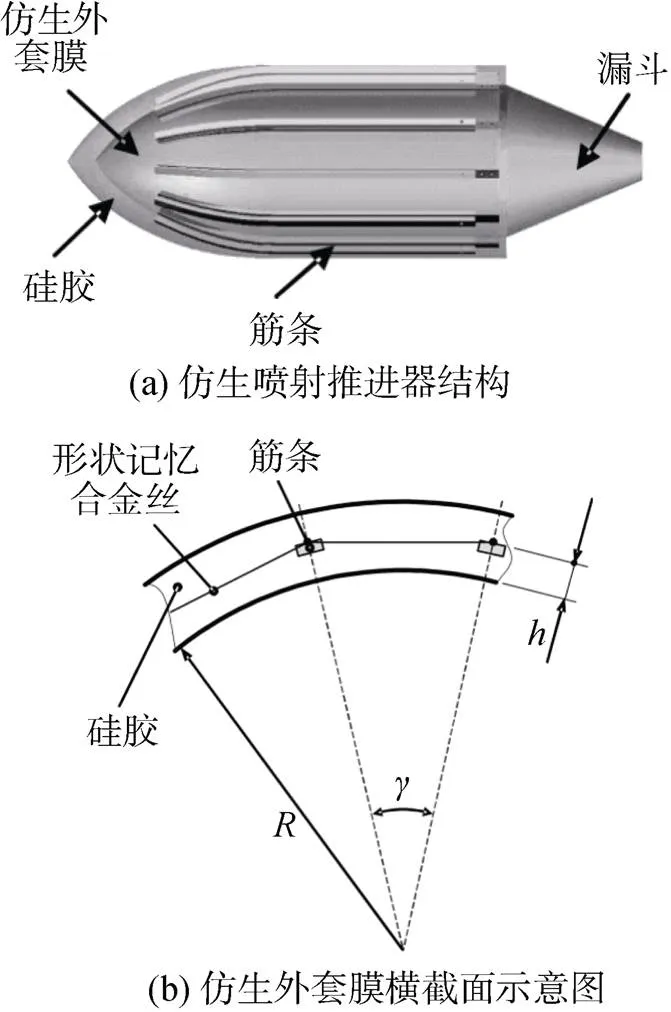
图10 仿生喷射推进器
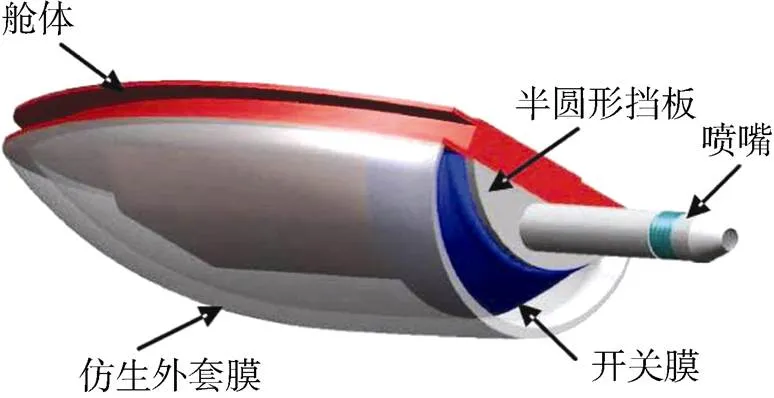
图11 仿生外套膜推进器
以上研究的机器人都旨在通过模仿乌贼喷射推进的运动方式来设计仿生喷射推进器, 但由于SMA丝本身的驱动频率较低, 导致其驱动的仿生外套膜收缩频率也较低, 从而使其游动速度较低, 制约了此类推进器的实际性能。Gao等[19]通过对结构的优化以及SMA丝布置方式的改进, 使得该类推进器的驱动频率和游动速度接近于真实的乌贼, 但各方面性能与真实的乌贼相比依然存在着一定的差距。有2种方法可以改善此类推进器的运动性能: 一是通过结构的优化以及提高材料的形变来增大腔体体积的变化量以提高单次喷射推进产生的推力。由于SMA的形变率受到驱动电压的影响, 提高对SMA施加的电压可以提高其形变率从而提升推进器产生的推力。二是提高水流喷射的频率, 喷射的频率受到SMA丝驱动频率的影响, 而SMA丝的驱动频率又取决于其加热和冷却所需的时间, 这是无法从原理上避免的, 一种可行的方法是, 用多腔体的设计替代原来的单个腔体的设计, 多个腔体交替完成喷射推进, 来提高整体的推进频率。同时, 各驱动参数应当处在合适的范围, 采用合适的驱动电压, 脉冲的宽度以及间隔也能实现运动性能的优化。
3.3 仿生鱼类
鱼类是迄今为止研究最为广泛和成熟的仿生水下生物。鱼类的运动方式大致可分为2种: BCF和MPF运动。
蝠鲼采用MPF运动, 其特有的大型三角形胸鳍占据了身体的大部分, 运动时其胸鳍整体波动以产生动力。2011年, 美国弗吉尼亚大学的Chen等[20]受蝠鲼的运动模式启发研究了采用IPMC作为驱动材料的仿生蝠鲼机器人。该仿生机器人的一对胸鳍是由多片长条状IPMC与聚二甲硅氧烷(polydimethylsiloxane, PDMS)材料无缝粘合而成的膜, 每片胸鳍拥有4片IPMC驱动器, 单片仿生胸鳍长度80 mm, 宽度70 mm(见图12(a))。IPMC在模具中固定好位置后, 注入PDMS并在室温下固化, 实现IPMC与PDMS间的无缝粘合。每片IPMC单独控制, 产生不同幅度和相位的运动以实现仿生机器人在水下的复杂运动。机器人的整体主要包括带有金电极的丙烯酸框架(见图12(b)), 框架用于固定一对胸鳍, 丙烯酸聚合物制成的尾部用于保持运动时的稳定性, 聚合物泡沫用于提供必要的浮力, 身体中部的盒子用于容纳电池以及控制电路(见图12(c))。该仿生机器人的主要体长80 mm, 游动速度4.2 mm/s (0.052 5 BL/s)。仿生蝠鲼的运动性能主要与其胸鳍相关, 因此可以通过提高所制作的膜的运动学性能来实现。首先, 可以通过改进IPMC的制造工艺提高其产生的动力以及快速响应的时间。其次, 还可通过使用性能更好的柔性材料来提高膜的整体运动性能。此外, 对IPMC驱动器的控制也存在着较大的优化空间。由此, 整个仿生胸鳍将更好地模拟真实的蝠鲼运动以获得更高的推力。同时, 改进整个机器人的设计来模仿蝠鲼的身体可以获得更好的流体动力学效果, 提升推进速度。
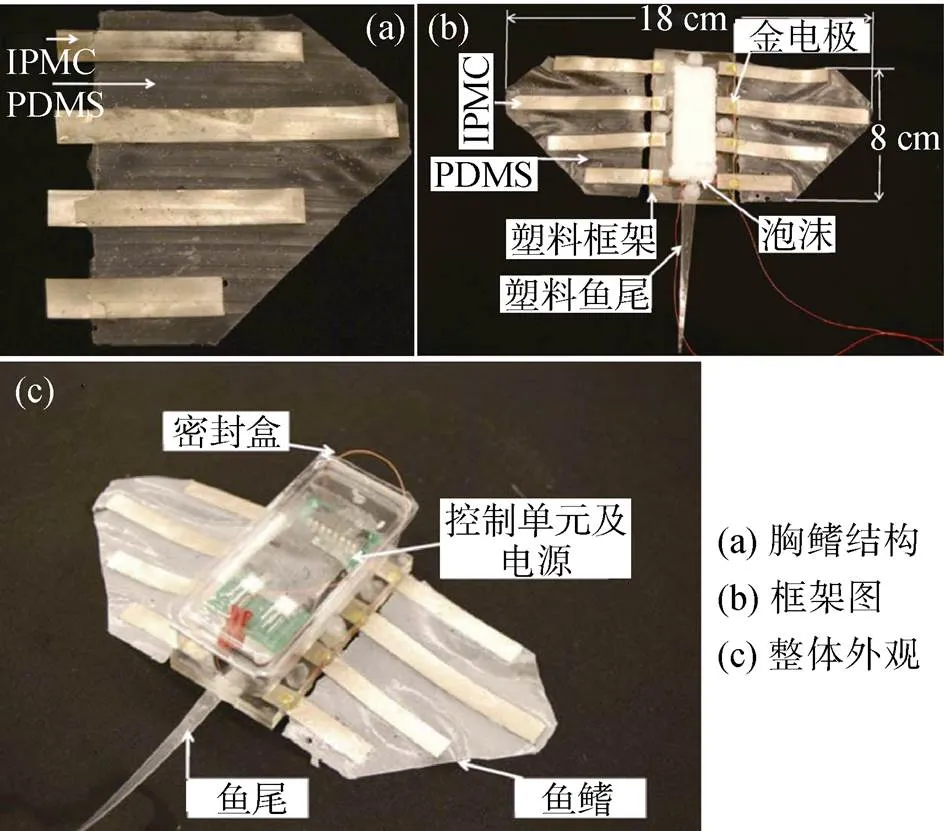
图12 仿生蝠鲼机器人
浙江大学的Li等[21]受到蝠鲼胸鳍拍翼运动的启发, 于2017年研究了可快速运动的电子鱼。该电子鱼将DE作为驱动材料, 以硅胶薄膜为鱼鳍, 并且用硅胶框架作为电子鱼的柔性身体, 镶嵌了电磁铁的鱼尾可以在行进中对其进行方向控制(见图13(a))。肌肉层是电子鱼的主要结构之一, 其中作为电极的水凝胶薄膜被密封在预先拉伸的DE膜之间。胸鳍层的硅胶薄膜附着在用作支撑的“L”形框架上。电子鱼的身体由模具中的硅胶固化形成。移除模具后预先拉伸的肌肉皱缩, 牵拉着整个身体呈弯曲状。由于采用了柔性且透明的材料, 这使得电子鱼在较好模仿蝠鲼运动机制的同时具有良好的隐蔽性(见图13(b))。未施加电压时, 其肌肉和身体保持着平衡的弯曲状态, 当施加电压时, DE膜发生形变, 处于驱动状态(此时相对于放松状态来说, 身体的弯曲程度减小(见图13(c))。这就使得在施加周期性的电压时, 电子鱼可以通过鱼鳍的拍动产生推力进行运动。该电子鱼总长93 mm, 在7 kV电压和8 Hz频率下有着85 mm的最小转弯半径。而且其依靠板载电源可在9.5 kV和5 Hz的条件下达到64 mm/s 0.69 BL/s)的游动速度, 能耗为0.024 W。其速度与能耗与一种小型虹鳟鱼相近, 因此其不仅速度快且与生物特性相近。此外, 该电子鱼在实验中能够适应较大范围温度变化的水环境, 表明了其有着相当好的环境适应性, 而SMA驱动器对较大温度范围的适应是难以实现的。总的来说, 该仿生电子鱼具有柔性的身体, 良好的运动性能、隐蔽性和环境适应性。虽然该电子鱼采用DE材料作为驱动器与水环境有着良好的兼容性, 但是其需要的高驱动电压在一定程度上限制了其在更大水域范围内的应用。
多数鱼类采用BCF运动方式, 包括鳗鲡模式(anguilliform)、鲹科模式(carangi form)、鲔科模式(thunniform)等。
西班牙马德里理工大学的Rossi等[22]受鱼类红肌的启发, 于2011年研究了一种由SMA驱动器生成运动的仿生机器鱼。鱼类的红色肌肉主要用于在游动过程中弯曲鱼类身体中那些柔性但几乎不可压缩的结构, 比如鱼骨来产生运动。该模型中, 将机器鱼的身体分成长度相同的3个部分, 因此其拥有的自由度足以模仿鲹科模式(caran- giform), 亚鲹科模式(subcarangiform)及鲔科模式(thunniform)的游动方式。使用SMA驱动器来实现连续弯曲的柔性结构。考虑到温度、抗冲击性和柔韧性, 机器鱼的主干部分由1 mm厚的聚碳酸酯制成。此外, 采用PVC材料制成肋状物结构来支撑覆盖在机器鱼表面的硅基皮肤, 从而得到整体的三维结构(见图14)。除尾鳍和头部外, 机器鱼的总长度300 mm, 最大速度可达114 mm/s (0.38 BL/s), 最小转弯半径0.5 m。
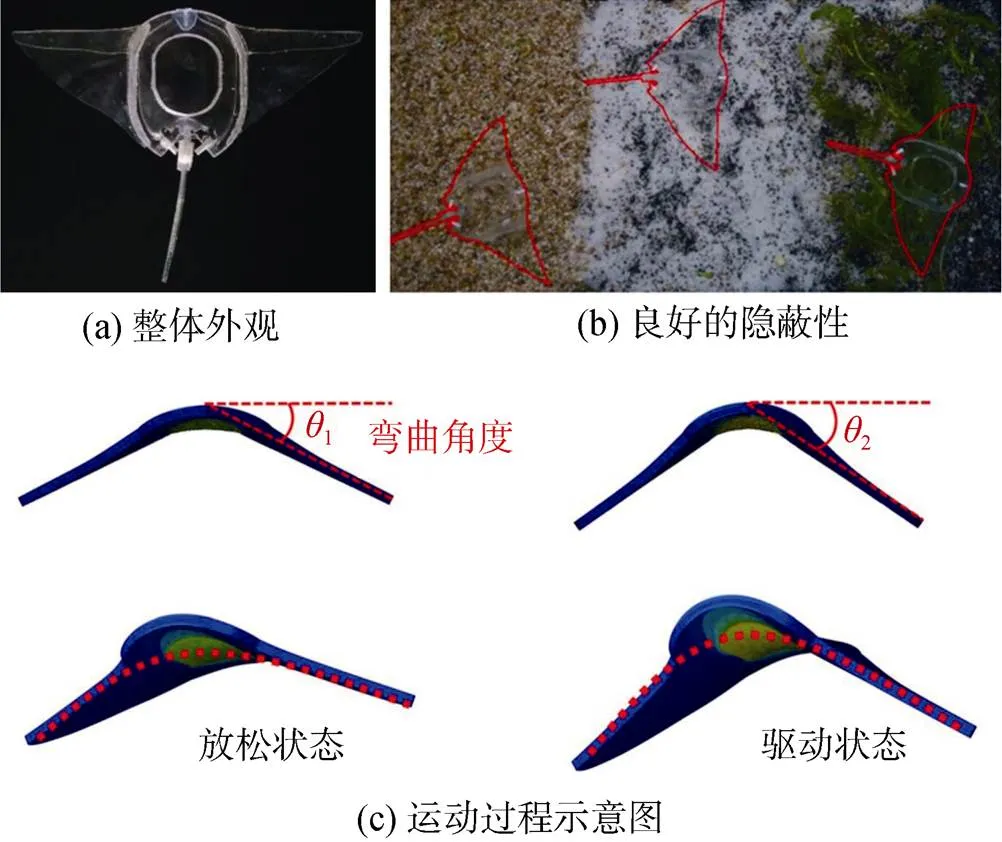
图13 柔性电子鱼
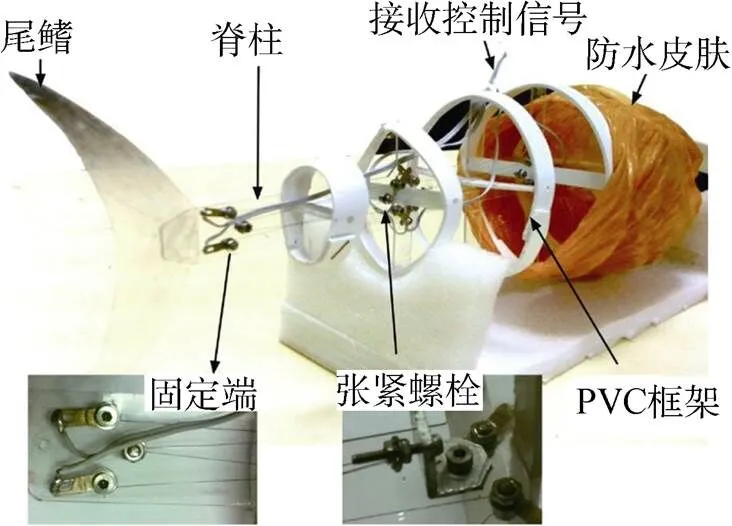
图14 仿生机器鱼结构框架
东京工业大学的Kamamichi等[23]在2006年研究了一种采用IPMC作为驱动器的仿生蛇形游动机器人(见图15)。蛇形机器人采用鳗鲡模式的运动形式, 通过全身的起伏波动来产生推进波。该蛇形机器人由3个关节组成, 其关节的框架由苯乙烯泡沫制成。鱼鳍附着在每个框架的底部, 相邻的关节之间由IPMC薄膜相连接。机器人的整体质量为0.6 g, 整长为120 mm, 其游动速度为1.8 mm/s(0.015 BL/s)。
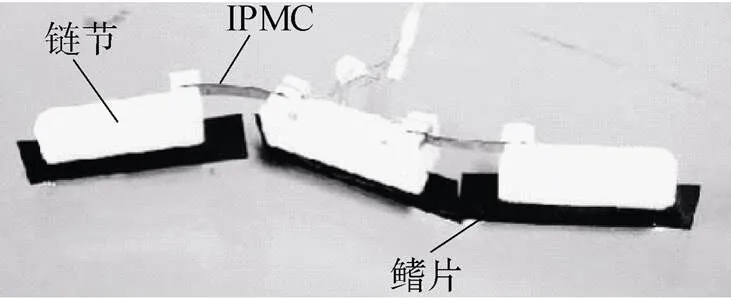
图15 IPMC驱动的蛇形机器人
除此之外, 美国内华达大学拉斯维加斯分校Kim教授团队[24]于2012年研发了一种基于分布式IPMC驱动的仿生鱼鳍, 该鱼鳍能够实现弯曲和偏转运动, 以及仿生鱼的上浮和偏转运动。密歇根州立大学的Tan等[25]在2006年研究了IPMC驱动的自治仿生机器鱼, 其研究主要侧重于控制策略和算法的实现。2009年, 东北大学的郝丽娜等[26]以鲹科模式游动的鱼类为蓝本,研究了采用IPMC驱动的单自由度机器鱼。北京航空航天大学沈奇等[27]于2014年设计了一种IPMC驱动的仿生机器鱼样机并通过实验对其推进效率进行了研究。最近Wen团队[28]设计了一种具有可变形中间鳍的仿生机器鱼并研究了中间鳍的变形对速度和线性加速度等参数的影响, 对仿生机器鱼的发展提出新的设计空间。国内一些其他研究机构, 如西安交通大学、河海大学、南京航空航天大学以及合肥工业大学等, 也开展了相关研究。
4 不同水下仿生机器人运动效率分析
由于驱动材料选取不同, 模仿的运动对象不同, 文中介绍的以3种不同推进方式作为基础设计出的水下仿生机器人的结构均有各自的特点。衡量水下仿生机器人运动性能的主要参数为机器人的游动速度, 为了综合比较的方便, 结合了机器人的尺寸和游动速度, 将他们的比值(速度与体长比, 即机器人每秒游过几个体长的距离)来进行数据比较(见图16)。
一般来说水母的推进方式是较为缓和的, 因此在自然界中其运动速度相对较低。但是从图中可以看出, 通过结构的优化设计和控制参数的合理选取, 使得体长较小的仿生水母机器人可达到相对较高的速度。采用乌贼喷射推进方式的机器人其体长较大, 其推进速度可以达到一个较为稳定的范围。由于自然界中鱼类的种类繁多,采用的推进方式也各有不同, 因此水下仿生机器人可以模仿的对象众多。实际中水下仿生机器人的结构设计有多种, 包括类似鳗鱼、蝠鲼等, 各种设计之间运动参数以及尺寸参数灵活性很大, 有很多现有的典型可供参考。
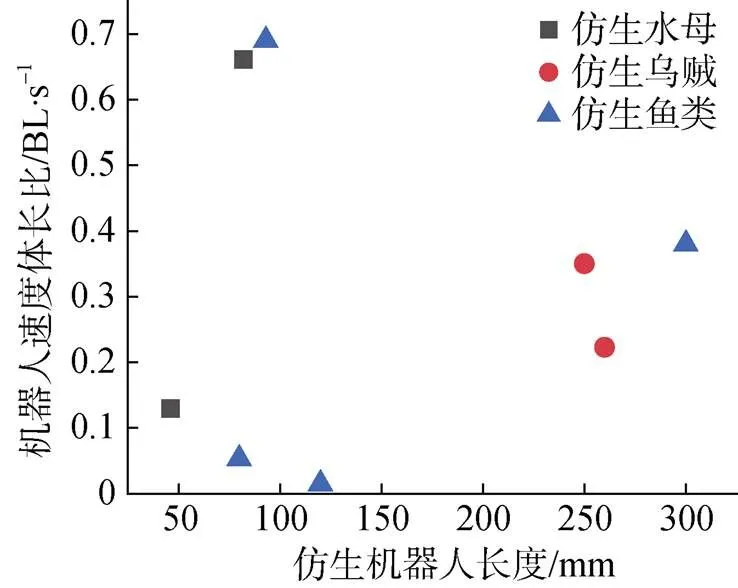
图16 水下仿生机器人速度对比
从图中可以看出, 采用水母推进方式的机器人相对采用其他运动方式的机器人来说尺寸较小, 但是其相对的推进速度却可以达到很高, 因此, 想要设计尺寸较小但速度较高的水下机器人, 采用水母的运动方式更为可行。仿生乌贼机器人采用了乌贼喷射推进的运动方式, 其在尺寸与速度相结合的方面具有一定的优势, 虽然尺寸相比仿生水母机器人要大一些, 但其推进速度达到了一定理想的水平。综合来看, 仿生乌贼更适合于短期爆发性“逃生”, 而不适合于长期“巡游”。水下仿生机器人由于可模仿的生物种类众多, 其结构也多样化, 因此其结构设计尺寸和运动速度的范围都很大, 可以看出, 水下仿生机器人既可以做到小型化甚至微型化, 亦可在大型化的同时保证较高的速度。
从驱动材料的角度来看, 仿生水母和仿生乌贼大多采用了形状记忆合金作为驱动器, 而仿生鱼驱动器设计却涉及了多种材料。因为仿生水母和仿生乌贼都采用了将腔体中水排出产生反作用力的推进方式。该方式的推进速度和效率与每次驱动从腔体中所排出的水的体积相关, 因此腔体体积变化率增大, 其运动性能就会随之相应提升。SMA可以产生大变形及较大的应力, 采用这种材料作为驱动器, 可使得腔体体积变化率增大。虽然驱动频率较低, 但大输出力使得以SMA作为驱动器的水下机器人推进速度较大。以IPMC作为驱动器的水下机器人其运动速度相对较低, 但是尺寸也更小。如果需要将机器人小型化甚至是微型化, 可以选择IPMC作为驱动器。DE材料驱动频率高, 变形大, 但需要高驱动电压, 且其需要预拉伸来发挥驱动作用, 同时材料本身较为柔软, 需要预设刚性框架对其进行支撑, 这意味着需要采用合理的结构设计来发挥其性能。压电材料虽然驱动力大, 频率高但是变形小, 且需要的驱动电压很大, 这就限制了其在水下机器人中的应用, 因此目前相关的应用较少。
5 结束语
文中介绍了水母、乌贼和鱼类运动过程的机理以及各自运动的特点, 列举了采用SMA、IPMC和DE等智能材料的水下仿生机器人结构设计的特点以及目前国内外的研究现状, 并且对几种典型的机器人结构设计进行了比较和分析。
不同于以往采用电机进行驱动的设计, 将智能材料作为驱动器应用于水下仿生机器人, 不仅使机器人的结构更加简化紧凑, 还使机器人在水下运动的隐蔽性提高, 可以实现无声运动[26]。国内外的相关研究人员对各种水生生物的水下运动方式进行了分析并从中得到启发, 设计了多种结构的水下仿生机器人。同时得益于智能材料的应用, 这两者的结合使得水下仿生机器人可以实现身体的柔性连续运动, 更好地模仿水生生物在水下的运动。虽然智能材料作为驱动器成功应用到了水下仿生机器人中并相对于传统的驱动方式来说具有一定优点, 但是材料本身也存在着一些不可避免的特性影响着驱动的效率, 同时采用智能材料作为驱动器的机器人, 其速度、推进力等相较于电机驱动的机器人来说还有一定的差距[29-30]。
在今后的研究中, 不仅要对现有的结构设计进行优化, 还要更广泛地研究水生生物以获得更具效率的推进方式, 同时要对推进方式进行原理上的进一步分类, 为未来水下机器人推进方式的选择提出设计指导。建立一个完善的水下仿生机器人性能评价的体系也很有必要, 包括速度、机动性和能耗等, 这些将为水下仿生机器人的研究设计提供一个完备的衡量机制。此外, 除了要从水生生物的推进方式获取灵感, 还要对其感官、运动等诸多机制进行深入研究, 如水生生物在水中上浮下潜, 水中的定位和环境感知等, 国内外的学者已经在此方面开展了很多相关的研究工作[31-33], 期待未来可以实现对水生生物更多功能的模仿与集成。对于智能材料来说, 不同的材料有着不同的驱动机理与特点, 虽然采用智能材料作为驱动器可以很好的模仿水生生物运动, 但其普遍存在着驱动力小或响应速度慢等缺点, 因此一方面要对智能驱动材料进行机构设计和优化以最大化发挥现有材料的性能, 另一方面材料本身的研究也非常重要, 期望未来有更好性能的材料得到开发和应用[34]。同时, 结合材料本身的一些特性, 比如驱动/传感功能, 通过设计驱动/传感一体化的结构, 使水下仿生机器人更加智能化; 依赖于智能驱动材料的机电转换能力, 也可以开发能量自给的水下仿生机器人[35]。
此外, 大多数水生生物其身体都是柔性的, 其动作的产生不仅仅是因为特定区域肌肉及骨骼的运动, 而是全部的身体都参与到运动中, 因此其整个身体结构在运动中是连续的变形体。目前智能材料驱动的大多数水下仿生机器人除驱动部分外, 整体结构仍是偏刚性的。为了更好地实现机器人整体连续柔性的运动, 将来可以通过将柔性结构与软驱动器相结合来发展全柔性的水下仿生机器人, 这样可使机器人更好地模仿水生生物的运动。
[1] Ellerby D J. Encyclopedia of Fish Physiology|| Buoyancy, Locomotion, and Movment in Fishes|Undulatory Swimming[J]. Encyclopedia of Fish Physiology, 2011: 547-554.
[2] Alexander P. Robot Fish: Bio-inspired Fishlike Underwater Robots[J]. Underwater Technology, 2017, 34(3): 143-145.
[3] Low K H. Current and Future Trends of Biologically Inspired Underwater Vehicles[C]//2011 Defense Science Research Conference and Expo(DSR). Singapore: IEEE, 2011: 1-8.
[4] Trivedi D, Rahn C D, Kier W M, et al. Soft Robotics: Biological Inspiration, State of the Art, and Future Research[J]. Applied Bionics and Biomechanics, 2008, 5(3): 99-117.
[5] Trivedi D, Dienno D, Rahn C D. Optimal, Model-Based Design of Soft Robotic Manipulators[J]. Journal of Mechanical Design, 2007, 130(9): 801-809.
[6] Carpi F, Bauer S, De Rossi D. Stretching Dielectric Elastomer Performance[J]. Science, 2010, 330(6012): 1759- 1761.
[7] McHenry M J. Comparative Biomechanics: the Jellyfish Paradox Resolved[J]. Current Biology, 2007, 17(16): R632-R633.
[8] McHenry M J, Jed J. The Ontogenetic Scaling of Hydrodynamics and Swimming Performance in Jellyfish (Aurelia Aurita)[J]. Journal of Experimental Biology, 2003, 206(22): 4125-4137.
[9] Bajcar T, Malačič V, Malej A, et al. Kinematic Properties of the Jellyfish Aurelia Sp[M]//Jellyfish Blooms: Causes, Consequences, and Recent Advances. Springer: Dordrecht, 2008: 279-289.
[10] Bartol I K, Patterson M R, Mann R. Swimming Mechanics and Behavior of the Shallow-water Brief Squid Lolliguncula Brevis[J]. Journal of Experimental Biology, 2001, 204(21): 3655-3682.
[11] Anderson E J, DeMont M E. The Mechanics of Locomotion in the Squid Loligo Pealei: Locomotory Function and Unsteady Hydrodynamics of the Jet and Intramantle Pressure[J]. Journal of Experimental Biology, 2000, 203(18): 2851-2863.
[12] Sfakiotakis M, Lane D M, Davies J B C. Review of Fish Swimming Modes for Aquatic Locomotion[J]. IEEE Journal of Oceanic Engineering, 1999, 24(2): 237-252.
[13] Boileau R, Fan L, Moore T. Mechanization of Rajiform Swimming Motion: The Making of Robo Ray[R].Vancouver: University of British Columbia, 2002.
[14] Lauder G V. Fish Locomotion: Recent Advances and New Directions[J]. Annual Review of Marine Science, 2015, 7: 521-545.
[15] Rosenberger L J. Pectoral Fin Locomotion in Batoid Fishes: Undulation versus Oscillation[J]. Journal of Experimental Biology, 2001, 204(2): 379-394.
[16] Guo S, Shi L, Ye X, et al. A New Jellyfish Type of Underwater Microrobot[C]//2007 International Conference on Mechatronics and Automation. Harbin, China: IEEE, 2007: 509-514.
[17] Villanueva A, Smith C, Priya S. A Biomimetic Robotic Jellyfish(Robojelly) Actuated by Shape Memory Alloy Composite Actuators[J]. Bioinspiration & Biomimetics, 2011, 6(3): 036004.
[18] 王扬威, 王振龙, 李健. 形状记忆合金丝驱动的仿生喷射推进器[J]. 哈尔滨工业大学学报, 2011, 43(9): 33-37.
Wang Yang-wei, Wang Zhen-long, Li Jian. A Biomimetic Water-jetting Vehicle Actuated by Shape Memory Alloy Wires[J]. Journal of Harbin Institute of Technology, 2011, 43(9): 33-37.
[19] Gao F, Wang Z, Wang Y, et al. A Prototype of a Biomimetic Mantle Jet Propeller Inspired by Cuttlefish Actuated by SMA Wires and a Theoretical Model for Its Jet Thrust[J]. Journal of Bionic Engineering, 2014, 11(3): 412-422.
[20] Chen Z, Um T I, Bart-Smith H. A Novel Fabrication of Ionic Polymer-metal Composite Membrane Actuator Capable of 3-dimensional Kinematic Motions[J]. Sensors and Actuators A: Physical, 2011, 168(1): 131-139.
[21] Li T, Li G, Liang Y, et al. Fast-moving Soft Electronic Fish[J]. Science Advances, 2017, 3(4): e1602045.
[22] Rossi C, Colorado J, Coral W, et al. Bending Continuous Structures with SMAs: a Novel Robotic Fish Design[J]. Bioinspiration & Biomimetics, 2011, 6(4): 045005.
[23] Kamamichi N, Yamakita M, Asaka K, et al. A Snake-like Swimming Robot Using IPMC Actuator/Sensor[C]//Proceedings 2006 IEEE International Conference on Robotics and Automation. Orlando, USA: IEEE, 2006: 1812-1817.
[24] Palmre V, Hubbard J J, Fleming M, et al. An IPMC-enabled Bio-inspired Bending/twisting Fin for Underwater Applications[J]. Smart Materials and Structures, 2012, 22(1): 014003.
[25] Tan X, Drew K, Usher N, et al. An Autonomous Robotic Fish for Mobile Sensing[C]//IEEE/RSJ International Conference on Intelligent Robots and Systems. Beijing, China: IEEE, 2006: 5424-5429.
[26] 郝丽娜, 徐夙, 刘斌. 基于 IPMC 驱动器的小型遥控机器鱼的研制[J]. 东北大学学报: 自然科学版, 2009, 30(6): 773-776.
Hao Li-Na, Xu Su, Liu Bin. A Miniature Fish-like Robot with Infrared Remote Receiver and IPMC Actuator[J]. Journal of Northeastern University(Natural Science), 2009, 30(6): 773-776.
[27] 沈奇, 韩晨皓, 王田苗, 等. 基于IPMC仿生机器鱼推进效率实验研究[J]. 北京航空航天大学学报, 2014, 40(12): 1730-1735.
Shen Qi, Han Chen-hao, Wang Tian-miao, et al. Experimental Investigation of Biomimetic Robotic Fish Actuated by IPMC[J]. Journal of Beijing University of Aeronautics and Astronautics, 2014, 40(12): 1730-1735.
[28] Wen L, Ren Z, Di S V, et al. Understanding Fish Linear Acceleration Using an Undulatory Biorobotic Model with Soft Fluidic Elastomer Actuated Morphing Median Fins[J]. Soft Robotics, 2018, 5(4): 375-388.
[29] Trivedi D, Dienno D, Rahn C D. Optimal, Model-Based Design of Soft Robotic Manipulators[J]. Journal of Mechanical Design, 2007, 130(9): 801-809.
[30] Katzschmann R K, Marchese A D, Rus D. Hydraulic Autonomous Soft Roboti Fish for 3D Swimming[M]// Experimental Robotics. Switzerland: Springer International Publishing, 2015: 405-420.
[31] Byungkyu K, Sunghak L, Jong H, et al. Inchworm-like Microrobot for Capsule Endoscope[C]//2004 IEEE International Conference on Robotics and Biomimetics. Shenyang, China: IEEE, 2004: 458-463.
[32] Raj A, Thakur A. Fish-inspired Robots: Design, Sensing, Actuation, and Autonomy—a Review of Research[J]. Bioinspiration & Biomimetics, 2016, 11(3): 031001.
[33] Voisembert S, Mechbal N, Riwan A, et al. Design of a Novel Long-range Inflatable Robotic Arm: Manufacturing and Numerical Evaluation of the Joints and Actuation[J]. Journal of Mechanisms and Robotics, 2013, 5(4): 045001.
[34] Hunter I W, Lafontaine S. A Comparison of Muscle with Artificial Actuators[C]//Technical Digest IEEE Solid-State Sensor and Actuator Workshop. Hilton Head Island, USA IEEE, 1992: 178-185.
[35] Bhandari B, Lee G Y, Ahn S H. A Review on IPMC Material as Actuators and Sensors: Fabrications, Characteristics and Applications[J]. International Journal of Precision Engineering and Manufacturing, 2012, 13(1): 141-163.
Progress of Biomimetic Underwater Robot Based on Intelligent Actuating Materials: a Review
WANG Yan-jie1, 2, HAO Mu-yu1, ZHANG Lin1, 2, LUO Min-zhou1, 2
(1. College of Mechanical and Electrical Engineering, Hohai University, Changzhou 213022, China; 2. Jiangsu Key Laboratory of Special Robotics Technology, Hohai University, Changzhou 213022, China)
It is one of the current research hotspots of biomimetic underwater robot to study and imitate the motion modes of aquatic animals and apply the intelligent actuating materials to the structure and motion design of a biomimetic underwater robot. Combined with the advantages of aquatic animals and intelligent actuating materials, the biomimetic underwater robot designed with intelligent actuating materials is easier to be miniaturized and higher maneuverability, so it can carry out continuous and flexible movement, and realize complex underwater motion. Compared with the traditional actuating mode, the biomimetic actuating mode has significant advantages. In this paper, the motion mechanisms of several typical aquatic animals are introduced. Comparison of performance specifications, advantages and disadvantages of four typical intelligent materials. The existing biomimetic underwater robots that imitate the propulsion modes of aquatic animals and design with intelligent materials, and their structural features are summarized. The motion efficiency of these robots are analyzed and compared. As a result, some key problems that need to be solved in future development of the biomimetic underwater robots are pointed out.
biomimetic underwater robot; aquatic animal; motion mechanism; intelligent actuating material
TP242; TB381
R
2096-3920(2019)02-0123-11
10.11993/j.issn.2096-3920.2019.02.002
王延杰, 郝牧宇, 张霖, 等. 基于智能驱动材料的水下仿生机器人发展综述[J]. 水下无人系统学报, 2019, 27(2): 123-133.
2018-09-30;
2018-12-15.
国家自然科学基金青年项目(51505369); 国家自然科学基金重大研究计划(91748124); 江苏省重点研发计划(BE2016055); 江苏省特种机器人技术高校重点实验室开放基金项目(2017B21114); 常州市基础研究计划项目(CJ20179050).
王延杰(1985-), 男, 副教授, 主要研究方向为智能材料与结构和软体机器人技术.
(责任编辑: 许 妍)
