虚拟仪器下的生物摩擦力测试系统设计
2019-05-16李于洪贺同见
郭 岩,李于洪,张 宾,贺同见,宋 伟
(成都市特种设备检验院,四川 成都 610031)
0 引言
随着医疗技术的发展,人们对医疗水平的要求越来越高。在手术操作过程中,由于器械臂长、硬、直、可操作性差的缺点,手术器械容易对病变组织或者周围健康组织造成损伤,使病人受到不必要的伤害。因此,外科医生所面临的巨大挑战,是他们只能根据自身视觉信息来判断器械是否对组织特性造成影响。这给患者带来巨大的安全隐患[1]。对此,设计一套不同运动状态下的力采集系统,组建数据库来完善机器人的力反馈系统,提高手术水平的精准度,是智能化医疗器械发展的必然趋势。
2012年,由于一名外科医生的过失,致使一名女性患者死于子宫切除术。据英国《每日邮报》报道:目前广泛使用的“达文西“手术机器人,它在执行手术操作过程中打了一个躺在手术台的病人[2],给患者造成意外损伤。以上案例说明力触觉反馈系统对智能化手术机器人的重要性。为了模拟手术操作的运动过程,虚拟仪器下的生物摩擦力测试装置应能够以不同的速度和角度进行模拟手术操作试验,实时监测接触力的变化,并组建可靠数据库。
1 试验装置系统工作原理
本文设计的试验装置结构主要由伺服电机、丝杠模组、三角卡盘、测试端头和试验台组成。根据手术操作实际情况,结合低速、轻载、微量进给的特点,该机构采用丝杠模组实现直线运动。该传动方式具有精度高、传动效率高、同步性好、可靠耐用的优点,符合试验要求。伺服电机Ⅰ转动过程中产生的动力通过丝杠进行传动,并配合丝杠滑块上面的伺服电机Ⅱ传递给装有光纤传感器的测试端头,实现测试端头的直线运动和旋转运动。
试验装置结构如图1所示。
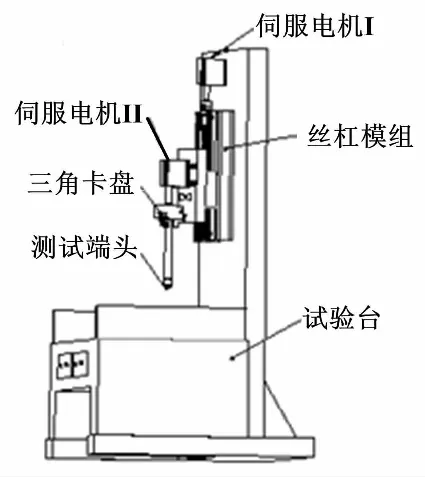
图1 试验装置结构图
在试验装置模拟手术操作过程中,需要使测量端头感知器械与组织接触的力。因此,根据上述的装置的结构特点及试验要求,在力传感器中,选择微光纤压力传感器作为敏感元件。它的灵敏度达到±0.04 rad/MPa,测量范围在0~60 MPa,符合要求。
微光纤传感器的安装结构如图2所示。
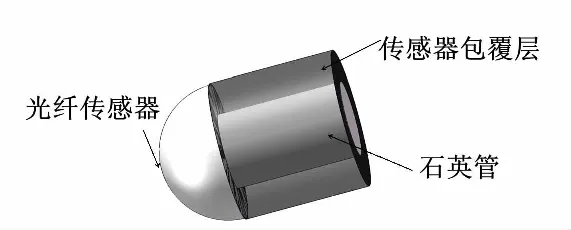
图2 微光纤传感器的安装结构图
测量端头在以一定的速度进入肠道的过程中,测试端头石英管以及传感器包覆层均会产生变形,使微光纤压力传感器膜片发生偏移。偏移量ΔS与压力ΔP之间的关系为[3]:
(1)
式中:S、h、R1、R2分别为空气腔的腔长、膜片的厚度、光纤的半径、膜片的半径;μ为泊松半径;E为杨氏模量。
在式(1)中,S、h、R1、R2均已知,从而可以得出偏移量ΔS与压力ΔP之间的数值关系。然而,膜片的偏移会引起腔长发生变化,导致光纤内入射光和反射光的光程差,引起相位发生变化。相位变化量Δα和膜片的偏移量ΔS也具有一定的关系,关系式为:
(2)
把式(1)代入式(2),简化后得到相位差Δα与压力变化ΔP之间的关系为:
(3)
式中:λ、ΔS、S、μ、R1、R2、h分别为Si720的平均波长、压力膜片的中心偏移量、空气腔的腔长、泊松半径、光纤的半径、膜片的半径、膜片的厚度;E为杨氏模量;ΔP为压力变化;Δα为F-P腔相位变化量。
因此,式(3)即为测试装置的测量模型公式。根据Si720的平均波长和式(3),即可计算出测试端头与生物肠道之间接触力的大小。
2 硬件设计
测量装置系统的硬件主要由计算机、西门子可编程逻辑控制器(programmable logic controller,PLC)、运动模组、光纤传感器、采集系统、松下伺服电机及驱动器、24 V直流电源、组装箱体和清洁装置组成。
试验装置硬件系统结构如图3所示。
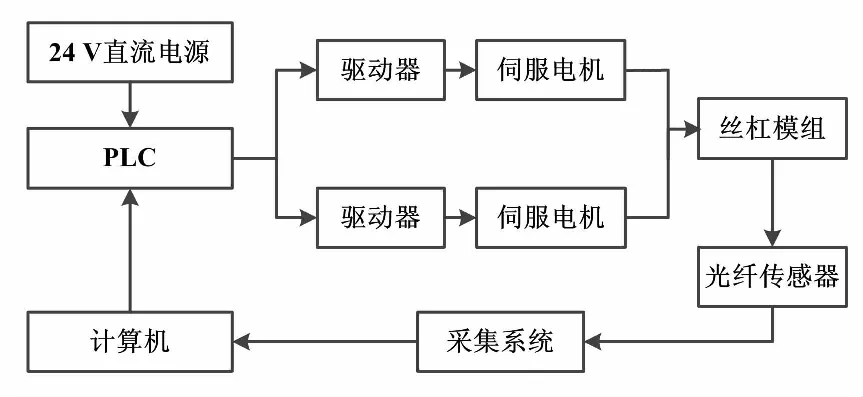
图3 试验装置硬件系统结构图
2.1 西门子PLC
西门子PLC采用的是S7-200 SMART 系列 ST20。它将微处理器、集成电源、输入电路和输出电路组合到一个结构紧凑的外壳中,形成功能强大的Micro PLC。ST20拥有2个脉冲输出、12个数字输入和8个数字输出,满足2个电机的控制要求,可通过OPC协议方便地和上位机进行通信。
2.2 微光纤传感器
微光纤传感器通过外界的作用力,引起压力膜片的偏移并改变腔长,从而导致腔内光信号的传输路径发生改变;根据光谱的移动解调出腔长的变化,得到相位变化量;再通过压力校准仪,转化成压力的大小[3]。微光纤压力传感器具有结构紧凑、稳定性好、精度高、体积小、耐高温和耐腐蚀的特点,广泛应用于生物医疗、食品安全等领域[4]。
2.3 解调仪
微光纤压力传感器收到的光谱信号变化,要通过Si720解调仪解调才能转化为实际需要的参数量。一般通过强度解调和相位解调这两种方法进行解调。强度解调就是对输出光信号的光强进行解调,该方法精度较低、范围较小。相位解调就是通过对输出信号的相位进行求解来实现测量。其输入光必须为宽带光源,通过腔长的变化得到输出信号相位的变化。这种方法测量精度高,所以本文采用相位解调[5]。
3 软件设计
该系统实现测试端头以不同的直线速度和不同旋转角度进行运动。测试装置运动的监控分析系统,采用组态王与西门子PLC混合编程的方式进行设计。组态王软件可以实时收集运动参数数据和通过PLC远程控制运动过程,生成Excel表格供分析数据使用[6];PLC完成伺服电机的脉冲发送。软件系统设计主要由PLC控制程序、数据采集处理程序和人机界面程序组成。
整个系统的数据采集都是实时读取信号处理电路的输出信号,然后通过A/D转换传输到计算机。计算机对采集到的数据进行实时处理和分析,并实时显示采集卡上传的数据。
3.1 人机界面软件设计
该系统以计算机为基础,实现运动的控制及采集的监测,集计算机、模块化硬件和图形化的编程软件于一体,搭建满足手术模拟需求的按钮。在计算机终端装有基于组态王开发的人机界面。操作人员只需在界面上输入相关的参数(速度、位移),就能够让设备按需运转。
具体的搭建过程如下。
首先,新建工程进入当前工程开发环境,定义I/O设备,单机“COM1”后,进行串口设置,将波特率设置为“9 600”,奇偶检验设为“偶检验”,数据位设置为“8”,停止位设置为“1”,点击确定。
然后,进行工程组态窗口设计,绘制按钮,并根据系统工程设定的需要新建各个数据变量。
最后,进行动画连接,写入位移、速度中间变量的脚本程序,试运行。
通过人机界面,可以对被控量进行设定,对过程值实时进行监控,进而在线分析各控制参数在控制过程中的作用。
3.2 PLC软件设计
装置系统使用的编程软件是STEP 7-Micro WIN SMART。根据试验要求,PLC必须与组态王通信才能实现监控。
定义组态王软件中的变量参数,使其能够读写PLC的输入输出地址,从而接收外部信号、控制PLC的输出[7]。对两台伺服电机进行控制,具体的控制为:丝杠开始使能启动,在丝杠速度设定中输入“1”,丝杠以1 cm/s的速度直线运动;丝杠位移量设定值为“10”,当丝杠行走10 s时,丝杠停止运动;丝杠运行过程中,也可以通过丝杠停止指令使丝杠强行停止;丝杠结束使能关闭,丝杠速度最大值设定为2.5 cm/s。当丝杠走完有效行程时,报警指令开启,保护设备受损。旋转运动的控制方式和丝杠相同,速度最大值设定为90 (°)/s。
控制程序流程如图4所示。
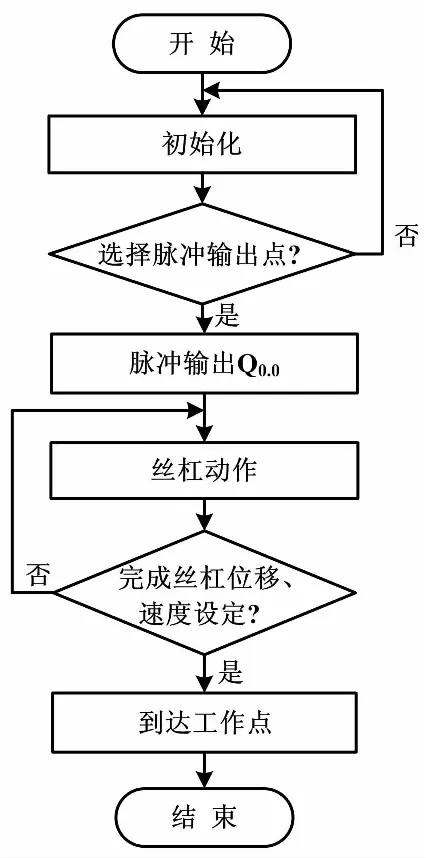
图4 控制程序流程图
4 试验研究
以课题组所设计的器械与生物肠道接触力的测试装置为基础,根据上述的力信号采集硬件和软件系统,组装了测试装置,并进行试验。测试端头以1 cm/s的直线速度和30 (°)/s的旋转速度运行2 s进入兔子肠道,并以相同的运动状态在肠道中运行5 s 。肛门具有自动收缩的特性,所以测试端头刚进入肠道时,曲线急速上升,达到顶点处,测试端头的光纤传感器变形最大,器械对肠道的作用力最大。端头进入肠道以后,以相同的运动状态继续运动。此时,传感器主要受到肠道内部分泌的液体以及肠道自身的蠕动力的作用[8],受力迅速减小并趋于平缓,相位差迅速减小也趋于平缓。
整个运动的过程中,最大相位差时没有对肠道造成损伤,则记录此时的相位差,并保存至数据库。在全程的试验过程中,由于设备精度和试验条件的限制,所测量的数据相对于理论数据会产生一些偏差,但仍然具有一定的参考价值。试验表明:该装置操作简便、功能完善、精度可靠,可作为力反馈系统数据库收集的试验平台,为相关技术的深层次研究提供了一个有效的分析监控平台。
5 结束语
本文研究了西门子PLC与组态王软件协同配合的设计方案[9],所设计的试验装置实现了手术器械与生物肠道之间的力信号采集监控。
将微光纤传感器、PLC控制器和组态王的虚拟仪器技术相结合,应用于器械末端的信号采集系统中,实现了数据采集的智能化和一体化。试验装置采集到的相位信号,通过砝码校准也反映了力的信息[10]。将采集到的测试端头在不同运动状态下进入肠道内的相位变化信息,储存到数据库,为今后智能手术机器人力反馈系统奠定了数据基础。