美国有人-无人编队技术发展分析
2019-05-16许赟中国航空工业发展研究中心
许赟/中国航空工业发展研究中心
有人-无人编队技术是实现有人装备与无人装备作为一个综合系统编队协同作战的相关技术,是进一步发挥无人装备作战效能,提升体系作战能力的重要技术。当前,美国以有人机-无人机编队协同技术为研究重点,聚焦提升互操作等级、实现协同交战、构建统一架构先后实施了一系列研究项目,持续推进相关领域技术发展。
2019年1月22日,美国通用电气航空集团宣布获得美空军研究实验室(AFRL)“有人-无人系统编队赋能架构”(TEAMS)原型项目合同。有人-无人编队技术是指实现有人机(车、艇等)与无人机(车、艇等)作为一个综合系统编队协同作战的相关技术,将实现平台间的互操作和资源控制共享,从而实现共同的作战任务目标,其中有人机与无人机编队技术是当前发展最为迅速的方向,其技术涉及体系架构、自主控制、编队通信、感知规避等多个领域。鉴于日趋复杂和激烈的未来空战环境,以美国作为世界主要军事强国和航空大国,为进一步发挥无人机作战效能,提升无人机在现有空战装备体系中的地位,均开展了有人-无人编队技术的探索和示范验证工作。
美国有人-无人编队技术研究历程
美国有人-无人编队技术研究与实践探索均开展较久,其最早的有人-无人编队技术研究和实践工作可追溯至上世纪60年代,当时美国空军探索利用C-130运输机对AQM-34无人侦察机进行机载控制,实现无人机和运输机的编队飞行和协同侦察控制。
进入21世纪,美国陆军成为探索和实践有人-无人编队技术的主力,率先以武装直升机与无人机3级互操作能力(控制和监视无人机载荷并直接接收无人机数据)为突破口,实现了武装直升机作战人员可通过座舱显示器最直接获取无人机传感器数据,提高武装直升机战斗人员识别、分类以及辨认目标位置的能力,从而降低战场误伤风险。此后,美国陆军不断致力于提升有人-无人互操作能力等级。
2001年美国陆军开始采用机载有人/无人系统技术(AMUST)进行了有人-无人编队验证,并在2006年完成了“猎人远距离杀手编队”高级概念技术演示,利用AH-64D直升机实现了对RQ-5B“猎人”无人机系统实现了4级互操作,通过有人-无人协同实现从后者发射了“海尔法”导弹。此后,美国陆军航空兵利用“移动指挥助手”(含无人机系统控制、Link-16等数据链),实现了利用UH-60“黑鹰”直升机控制“猎人”无人机系统及其传感器,并实现了在飞行中与战斗机(F/A-18)和侦察机(E-8)间发送和接收战术信息。
2010年9月,美国陆军进行了一次由“阿帕奇”直升机飞行员控制“影子”、“猎人”以及“大乌鸦”无人机的合成演练。根据此次演练结果,AH-64E明确要求加装3级和4级互操作控制装置,AH-64E将利用其装备的无人机战术通信数据链组件(UTA)实现50km范围的3级和4级互操作能力,AH-64E的飞行员可以进一步增强其态势感知能力和网络中心互操作能力,同时显著降低传感器到射手的周期。
2011年,美国国防部在其发布的《2011-2036财年无人系统集成路线图》中将有人-无人编队作为无人系统未来发展的7大技术能力挑战之一。
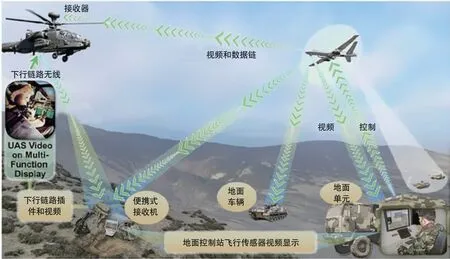
图2 MUMT-X项目以空空、空地数据链为核心,旨在实现直升机与无人机间的5级互操作能力
美国有人-无人编队技术当前主要项目进展
随着对无人机系统可靠性和功能信心的增强,有人-无人编队技术探索日趋深入,瞄准实战化运用需求和作战任务能力提升继续发展。
(1)有人/无人编队-拓展能力(MUMT-X)项目
2017年12月,L3技术公司获得价值9700万美元的合同,开发适用于AH-64E攻击直升机和“影子”及MQ-1C“灰鹰”无人机实现有人-无人编队的相关技术,从而拓展有人平台执行侦察任务时的信息收集能力。该项目是2015年签署的MUMT-X项目的通信升级合同,目标是实现5级互操作能力,这意味有人机可以具备无人机的完全控制能力,包括无人机的起飞和着陆。2018年7月,在英国范堡罗航展上,L3技术公司公开展示了其有人-无人协同技术成果,宣布其开发的MUMTi机载数据链系统卓越的互操作能力、快速的连通性和高速通信能力,实现空地、空空作战单元间的有效通信,并已在AH-64直升机及包括MQ-1C“灰鹰”、“影子”和“乌鸦”等无人机系统上得到验证。
(2)“忠诚僚机”项目
“忠诚僚机”概念美空军于2009年在其无人机系统发展路线图中首次提出的有人机-无人机协同作战概念,其核心是构建以先进有人机为核心、高性能无人机为支撑的作战编队,充分发挥无人机机动性好、可消耗的特点,解决先进有人机规模受限的现实,显著增强美军空中作战力量。2015年美国空军研究实验室启动名为“用于忠诚僚机试验平台的自主技术”研究项目,同年洛克希德·马丁公司实施了“海弗-空袭者I”(Have Raider I)演示验证试验,利用无人化改装的F-16验证了有人无人编队协同中长机指挥与控制僚机、自主编队飞行、僚机航线跟随、自主防碰撞等多项技术验证;2017年3月,洛克希德·马丁公司完成“海弗-空袭者II”验证飞行,实现了无人化F-16与地面站虚拟长机编队,演示了基于预设参数自主攻击地面目标以及在空对地攻击任务期间自动对动态威胁环境作出反应的能力,验证了机遇开放式系统架构的软件集成环境实现有人/无人编队交互可行性。

图3 美国空军研究实验室“呼唤行动”宣传片展望了有人-无人编队技术能力的未来
根据美空军“忠诚僚机”技术发展的整体构想,2020财年将验证拒止环境下对地攻击任务能力,有人机在协同作战中将承担指挥、目标信息和任务参数注入功能,为无人机选定和指示攻击目标,并指挥无人机完成预定攻击任务;“忠诚僚机”应具备的能力包括:编队飞行、巡逻、重返、任务执行、武器投放;针对新的地面目标的任务规划能力;对目标的定位、成像、攻击和再成像(毁伤评估)能力;验证内部意外状态恢复能力;验证编队内通信可靠性。2022财年,以防空压制任务为核心,进一步验证区域搜索能力以及对该区域内敌方防空系统实施压制和摧毁的能力。
(3)有人-无人编队赋能架构
有人- 无人编队赋能架构(TEAMS)项目最初的来源是美国陆军基础垂直运输联合项目协议,该协议目标是建立长期机制,促进航空业的团队合作、联网、规划和技术开发。2016年美国陆军发布首份关于有人-无人编队赋能架构研究基本注意事项,明确了研究工作初步目标:即开发适用于飞机系统的有人-无人编队(MUM-T)参考架构,该架构将用于指导有人-无人编队相关技术在支持编队系统的多型产品线中的成熟和最终过渡。该项研究的最终成果将构建一个可迭代、以架构为中心、基于模型方法原型,利用该方法原型可以定义一系列架构及相关流程、方法、工具和环境,从而实现日趋复杂的有人-无人编队技术的快速成熟和经济过渡,并确保其可信性和可保证性。
尽管项目的研究目标并未发生变化,但是2019年正式启动为期两年TEAMS项目已转为美国空军研究试验室“灵活、有保证的有人-无人系统”(FAMUS)项目的一部分。FAMUS旨在为异构、多人、多机团队的实战化奠定技术基础,设想中的团队能够灵活、可靠地执行一系列任务。TEAMS将开发实现下一代有人-无人机编组能力的原型架构,研究成果将为AFRL实现其开发用于未来自主飞行器的开放、弹性、可扩展的解决方案目标奠定坚实基础。
有人-无人编队协同技术未来发展
2018年3月,美国空军研究实验室公布了名为“呼唤行动”的2030年前技术发展构想宣传片,展示了“忠诚僚机”作战概念的最新设想,由一架F-35和6架隐身无人作战飞机组成的有人/无人编队,无人机在有人机的指控下实施攻击作战,揭示了有人-无人编队协同技术的未来。
总体而言,有人-无人编队任务的其它各种挑战包括货物运输、空中加油、拥堵区域封锁、电子/网络攻击、防空压制以及其它常规空战任务。尽管,有人-无人互操作技术已经得到了有效解决,但是实现各类实战化任务仍存在诸多的技术难题。例如实现协同空战任务能力时,确保高机动飞机和高机动无人机系统间的通信能力要求自主技术和人系统接口必须取得重大进步,而诸如电子/网络攻击(EA)、防空压制(SEAD)等任务则需要低截获概率数据链。此外,如果是多机编队的有人-无人协同,还需要解决更多的问题,包括:基于多种无线电频率并进行冲突消解的安全通信网络、一机控多机,设备平台必须能够进行高效机载处理,从而减少对通信带宽的需求,以及在无需操作员输入情况下的无人机协同,其它的技术挑战包括平台尺寸/重量/功率受限于提高性能和能力之间寻求平衡。■
