基于AMESim旋耕机耕深控制研究
2019-05-15吴林峰刘亮亮
吴林峰,刘亮亮
基于AMESim旋耕机耕深控制研究
吴林峰,刘亮亮
(华北水利水电大学机械学院,河南 郑州 450045)
旋耕机作为重要的耕整机械在用于田间作业时,控制其耕深稳定是提高耕作质量的重要措施之一。对旋耕机耕深控制系统进行了分析,通过仿真AMESim旋耕机典型工况下动力学特性,结果表明:旋耕机的旋耕作业需要花费1.8s的时间,来完成液压缸活塞杆位移变化,将旋耕深度稳定在158毫米,系统响应特性十分优异。
旋耕机;液压系统;耕深控制;AMESim仿真
1 绪论
耕整地机械在我国现阶段农业生产当中是最重要的生产工具,它在我国被广泛应用和普及,随着耕整机械的大范围应用逐渐的改善了我国传统的农耕方式[1-3]。旋耕机作为重要的耕整机械,用于田间作业时,控制其耕深稳定是提高耕作质量的重要措施之一。
文章选择以某型旋耕机液压驱动的旋耕部件作为核心研究对象,旨在深入研究液压在旋耕部件悬挂与驱动刀轴旋转方面的应用,深入探讨机电液在旋耕机耕作深度控制方面的核心技术。拟采用对电液比例换向阀的输入电信号值的控制,达到调节流经换向阀口的流量,实现对液压缸的活塞伸出位移(耕深)的控制。
2 旋耕机耕深控制系统分析
该旋耕机驱动液压系统核心功能是完成旋耕机耕深控制,同时考虑到农田土壤中包含的树根、石块等杂物会造成旋耕机负载发生突变,该液压系统也要起到对旋耕机各部件进行过载保护的功用,液压系统原理图如图1所示:
如图1所示,旋耕机液压系统组成由泵3、马达10、液压缸8等元件组成,泵3产生高压油液,一路经过二位四通电磁换向阀11流入液压马达10,带动旋耕刀轴旋转,完成田间旋耕作业;另一路高压油液经过三位四通电磁换向阀5流入液压缸8,实现液压缸活塞的伸缩运动,带动与之铰接的悬架9动作,改变悬架9水平倾角,旋耕刀轴安装在悬架9末端,实现刀轴的竖直方向的移动,从而实现耕深的控制。
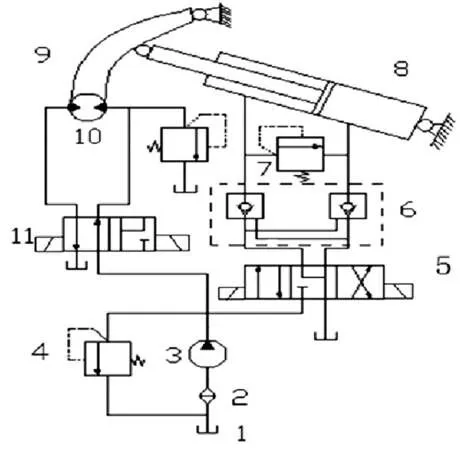
图1 旋耕机驱动旋耕部件液压系统原理图
3 基于AMESim的旋耕机液压执行系统建模与仿真
依照前文所涉及的旋耕机液压执行系统模型,借助AMESim软件搭建系统仿真模型,选取典型的旋耕机耕作模式,对系统进行仿真分析。

图2 旋耕机液压驱动系统AMESim仿真模型
依照前文第2章所建立的旋耕机驱动旋耕部件液压原理图,在AMESim仿真软件中搭建仿真模型如图2所示,在负载模型的设计中采用MECFR1R0A旋转库仑或粘滞摩擦模型来模拟负载摩擦扭矩,同时采用RL04旋转负载模型模拟粘性摩擦扭矩。
3.1 系统AMESim仿真模型的建立
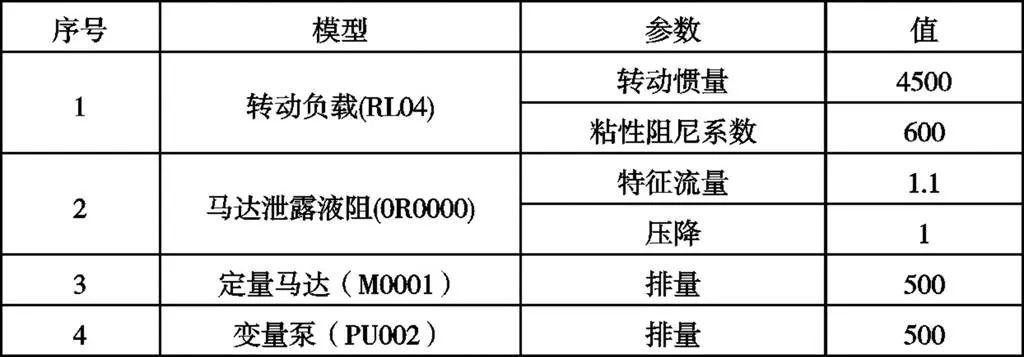
部分主要液压元件的仿真参数设置列于下表1中。
表1 旋耕机液压驱动系统AMESim模型部分参数表
3.2 旋耕机工作状态系统仿真分析
典型的旋耕机耕作模式下,模拟机手操作旋耕机使旋耕部件从耕深100mm缓慢增加到158mm并稳定旋耕作业状态,根据旋耕深度与液压缸活塞杆伸缩位移值之间的几何关系可知,液压缸的位移值需从35毫米变化到10毫米。
运行仿真时,用AMESim软件中的信号源给电液换向阀输入电位信号,来控制电液换向阀阀口的开度大小,从而控制流入悬挂液压缸无杆腔的流量,达到控制旋耕机耕深量的大小。依照前文对液压缸伸出位移与耕深量之间的换算关系得电液换向阀电位信号如图3所示。
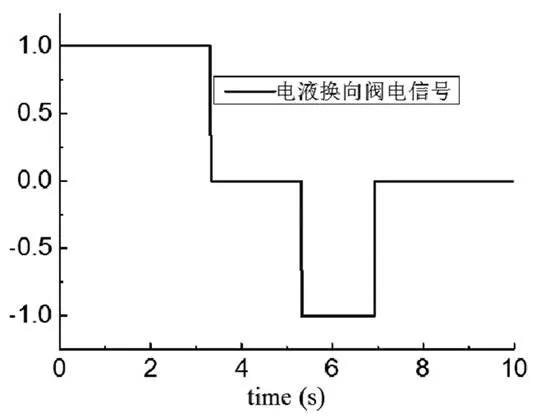
图3 工况2电液换向阀电位信号
3.3 仿真结果分析
旋耕机耕深控制核心执行机构液压缸相关仿真结果如图4所示。图中Graph1- Graph4分别表示:工作时遇到根据田间土壤条件的变化而改变耕作深度时,悬挂液压缸无杆腔进油流量、悬挂液压缸有杆腔回油流量、无杆腔进油压力以及液压缸伸出位移(耕深量)。图中流量出现负值情况是油液实际流动方向与AMESim软件中所假设的流量正方向相反所导致。

图4 液压缸仿真结果图
由上图可知,完成工况2,设置旋耕刀从旋耕深度值为100毫米变化到158毫米时,驱动旋耕机旋耕部件的液压系统变化到稳定的状态需耗时1.8s。因此旋耕机的旋耕作业需要花费1.8s的时间,来完成液压缸活塞杆位移变化,将旋耕深度稳定在158毫米,系统响应特性十分优异。
4 结论
对旋耕机耕深控制系统进行了分析,通过仿真旋耕机典型工况下动力学特性,结果表明:旋耕机的旋耕作业需要花费1.8s的时间,来完成液压缸活塞杆位移变化,将旋耕深度稳定在158毫米,系统响应特性十分优异。
[1] 何新如,孟祥雨,赵丽萍.耕整地机械发展现状分析[J].山东农机化,2014(6):24-25.
[2] 高蕾.棚室电动旋耕机自动控制系统设计[D].东北农业大学,2013.
[3] 李博.微耕机耕深自动控制系统的设计与研究[D].2015.
Research on tillage depth control based on AMESim rotary tiller
Wu Linfeng, Liu Liangliang
( School of Mechanical Engineering, North China University of Water Resources and Electrical Power, Henan Zhengzhou 450045 )
As an important tillage machine,rotary tiller is used in field operations.The stability of tillagedepth controlis one of the important measures to improve the quality of farming. The tillage depth control system of the rotary tiller was analyzed. The dynamic characteristics of the rotary tiller under typical working conditions were simulated. The results show that the rotary tiller of the rotary tiller takes 1.8 seconds to complete the piston rod displacement of the hydraulic cylinder. The change, the depth of the rotary tillage is stabilized at 158 mm, and the system response characteristics are excellent.
Rotary tiller; Hydraulic system; Tillage depth control; AMESim simulation
U462
A
1671-7988(2019)09-75-02
U462
A
1671-7988(2019)09-75-02
吴林峰,就读于华北水利水电大学机械学院。
10.16638/j.cnki.1671-7988.2019.09.025
