浅析STAR 2000一次雷达点迹门限调整功能
2019-05-14刘淇
刘淇


摘要:一次雷达与二次雷达相比较,其工作机制更为复杂,对于环境的状况的响应较为敏感,所以在一次雷达系统中,对于回波形成点迹以及点迹、航迹的生成和滤除等的调整功能要更为丰富。文章从点迹的输出和滤除门限进行探究,详细阐述STAR2000一次雷达的点迹门限调整功能,对今后该型号一次雷达在运行环境改变等情况下的信号优化以及虚假目标问题的解决具有实际意义。
关键词:一次雷达;点迹门限调整;信号优化
中图分类号:TN958 文献标识码:A 文章编号:1007-9416(2019)02-0229-02
0 引言
首都机场苏庄雷达站内使用THALES STAR2000一次雷达,于2008年运行至今信号质量良好,系统成熟稳定,各项录取功能对于仙波、地物杂波等的抑制效果良好。
STAR2000一次雷达在处理阶段,除去基本的增益调整、时间灵敏度控制、恒虚警调整等功能外,还具备有跨周期回波抑制、不合格回波存在抑制、积极干扰点迹抑制、点迹门限、航迹优化等等方式用于提高信号质量,本文将着重讲述点迹门限调整功能:其核心就是雷达通过检测某方位距离单元内点迹的密度,自动的调整各类点迹性能的门限,选出质量最优的点迹输出到航迹处理。
1 方位距离单元的划分及活动区域的设置
方位距离单元的划分决定了雷达使用点迹门限功能的范围,而在这些方位距离单元内设置不同的活动区域,目的是在这些区域内使用专用参数进行门限调整,其他未选择活动区域的部分则使用常规参数进行门限调整。
与划分方位距离单元有关的参数有四个,分别是:
(1)单元宽度(plot threshold sector width)。表示一个方位距离单元,其宽度是多少度。雷达提供了3个可选择的宽度,分别是45度(1/8scan),22.5度(1/16scan)和11.25度(1/32scan)。(2)最大作用距离(plot threshold max range)。表示点迹门限调整的最大作用范围,即在该范围以内,使用点迹门限调整功能,超出该范围不使用点迹门限调整功能。(3)窄脉冲区域内环数(active ring number table type(SR))。表示将窄脉冲作用区域等分成几个圆环。(4)宽脉冲区域内环数(active ring number table type(LR))。表示将宽脉冲作用区域等分成几个圆环。
例如:假设雷达窄脉冲作用距离为16.7海里,雷达最大作用距离256海里,然后设置:单元宽度=1/8scan;门限最大作用距离=100海里;窄脉冲区域内环数=2;宽脉冲区域内环数=5,则效果如图1所示,其中黄色区域为窄脉冲区域。
在图2中,方位距离单元范围内共设置了4个活动区域。标号为1、2、3、4,,在这些活动区域内使用它们各自的专用参数进行调整。在不带有标号的范围距离单元内(即图中的空白区),使用通用参数进行点迹门限调整。
2 方位距离单元内的点迹密度和点迹门限调整功能的开启
在确定了方位距离单元及活动区域后,雷达会自动计算各个方位距离单元内的点迹密度,其在时间上是以天线扫描周期为单位的,即天线每扫描一圈,雷达对点迹门限调整功能作用范围内的各个方位距离单元上的剩余点迹数量进行一次统计。在下一个天线扫描周期内,再进行一次统计,以此类推。
点迹密度的计算采用迭代方法进行计算,其公式如下:
Dn:当前天线扫描周期,方位距离单元内的点迹密度。
Dn-1:上一天线扫描周期,该方位距离单元内的点迹密度。
K:点迹密度累加系数(density integration coefficient)。
Nn:当前天线扫描周期,方位距离单元内的点迹数量。
系数K代表了当前天线扫描周期单元内点迹密度与上一个扫描周期单元内点迹密度的依赖程度。K越接近于0,依赖程度越小。当K等于0时,就是只计算当天线扫描周期单元内的点迹数量,不考虑其他扫描周期。K通常取值为0.8。
点迹密度的第一个作用,就是用于判断在这些方位单元内的点迹是否足够开启门限调整功能。将点迹密度与参数Dense area min/max threshold设置的最大和最小值进行比较来决定,例如当设置Max dense为3,Min dense为1,那么当该单元内的点迹密度大于3时,该区域开启点迹调整功能,当该区域的点迹密度降为1以下时,关闭点迹调整功能。
3 点迹特性的门限空间与子空间及区域的划分
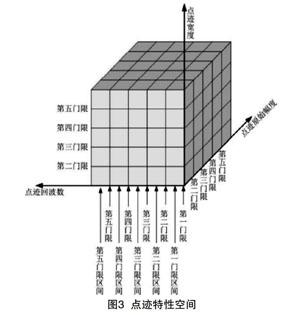
每个点迹都有三个特性,即点迹回波数、点迹原始幅度和点迹宽度。每一个特性都需要设置五个门限区间,当三个特性同时使用时,其门限空间就会组成如下图3所示的点迹特性空间。
对该点迹特性空间进行五个子空间的划分:第一子空间包含所有处在第一门限区间的点迹;第二子空间包含所有处在第二门限区间的点迹;第三子空间包含所有处在第三门限区间的点迹;第四子空间包含所有处在第四门限区间的点迹;第五子空间包含所有处在第五门限区间的点迹,如图4所示。
在每个子空间内,再进行区域划分:以第一子空间为例,如图5所示,区域A为点迹三个特性均在第一门限区间,区域B为点迹回波数与点迹原始幅度在第一门限区间,区域C为点迹原始幅度与点迹宽度在第一门限区间内,区域D为点迹回波数与点迹宽度在第一门限区间内,区域E为点迹原始幅度在第一门限区间内,区域F为点迹回波数在第一门限区间内,区域G为点迹宽度在第一门限区间内。五个子空间的区域划分方法一致。
4 方位距离单元的活动等级与点迹滤除规则
對于每个方位距离单元,依据其点迹密度,一共有13个活动等级,如图6所示。
针对不同的活动等级,雷达滤除不同层级的点迹,滤除规则如图7所示。
活動等级为0时,雷达不开启点迹调整功能,活动等级为1、2、3时,雷达删除第一子空间的A区、BCD区、EFG区点迹,活动等级为4、5、6时,雷达删除第一、二子空间的A区、BCD区、EFG区点迹,活动等级为7、8、9时,雷达删除第一、二、三子空间的A区、BCD区、EFG区点迹,活动等级为10、11、12时,雷达删除第一、二、三、四子空间的A区、BCD区、EFG区点迹(此时只剩第五空间点迹,也是最优点迹)。
点迹密度第二个作用就是决定单元的初始活动等级,注意并非是最终的活动等级,一个方位距离单元其初始活动等级得到确定后,雷达进行相应的点迹删除,删除后区域内剩余的点迹,雷达会自动进行剩余点迹密度计算,剩余点迹密度的计算也采用迭代的方法,在时间上是以天线扫描周期为单位的。
剩余点迹密度的计算公式如下:
D‘n:当前天线扫描周期,方位距离单元内的剩余点迹密度。
D‘n-1:上一天线扫描周期,该方位距离单元内的剩余点迹密度。
K:剩余点迹密度累加系数(activation integration coefficient)。此处也取0.8。
N‘n:当前天线扫描周期,方位距离单元内的点迹数量。
剩余点迹密度计算完成后将其与剩余点迹密度最高门限和最低门限这两个值(具体数值可以人工进行设置)进行比较,如果该方位距离单元内的剩余点迹密度大于剩余点迹密度最高门限时,雷达根据相应的规则,将该方位距离单元的活动等级升高1至3级,直到其剩余点迹密度低于最高门限或者升至12级为止;如果该方位距离单元内的剩余点迹密度小于剩余点迹密度最低门限时,雷达根据相应的规则,将该方位距离单元的活动等级降低1至3级,直到其剩余点迹密度高于最低门限或一直降低到0级为止,规则如图8所示。
当采用三个点迹特性进行点迹门限调整时,升高或降低步进为1级;当采用两个点迹特性进行点迹门限调整时,升高或降低步进为2级;当采用一个点迹特性进行点迹门限调整时,升高或降低步进为3级。
根据最终确定的活动等级,雷达删除相应的点迹后将最终剩余的点迹输出至后端进行航迹的生成与处理,点迹门限调整功能结束。
5 结语
以上就是STAR2000一次雷达点迹门限调整功能的原理,点迹调整作为输入到航迹处理器的前端功能对于信号质量的改善有着重要的作用,了解其原理对于一次雷达的信号优化有着积极的意义。
Brief analysis of STAR 2000 Primary Radar Point Trace Threshold Adjustment Function
LIU Qi
(China Civil Aviation North China Regional Air Traffic Administration, Beijing 100621)
Abstract:Compared with the secondary radar, the primary radar has a more complex working mechanism and is more sensitive to the response of environmental conditions. Therefore, in the primary radar system, the adjustment functions of the echo formation, the generation and filtering of the trace are more abundant. This paper explores the point trace output and filtering threshold, and elaborates the point trace threshold adjustment function of STAR2000 primary radar in detail, which is of practical significance for the signal optimization of this type of primary radar and the solution of the problem of false target in the future when the operating environment changes.
Key words:primary radar;point trace threshold adjustment; the signal optimization
