基于单片机的扫地机器人的设计与实现
2019-05-14卢一文
卢一文
摘要:掃地机器人,是一种智能扫地工具,它可以根据人们的需求,设置并清洁某一区域。本文介绍了扫地机器人的硬件组成及避障原理,即通过红线避障传感器探测障碍,从而控制电机转向实现避障。
关键词:STC89C52;单片机;E18-D80NK-N;红外避障传感器。
中图分类号:TP312 文献标识码:A 文章编号:1007-9416(2019)02-0000-00
1 系统的功能分析及体系结构设计
本设计由STC89C52单片机电路、2路红外避障传感器模块、2路按键控制电路、L298N电机驱动电路、12V电池盒电路、风扇驱动电路组成。
具体流程:(1)智能小车接电,按下启动按键,小车前行并且风扇开始转动,开始吸尘;(2)当左侧红外传感器监测到障碍的时候,系统会控制驱动模块右转弯;(3)当右侧红外传感器监测到障碍的时候,系统会控制驱动模块左转弯;(4)按下停止按钮后,系统会接收到停止命令,小车所有系统停止工作。
2 模块电路的设计
2.1 STC89C52单片机模块
为CMOS8位微控制器,呈现出高性能、低功耗的特征,拥有8K系统内置的图像存储器。由于考虑实际使用的便捷性,选择的存储器具有高密度存储的优点,与相关设备能够进行兼容,保证了设备使用的多样化。且存储器可以进行编程,实际上 具有的配置能够满足工作的需求,包括可编程flash和一个八位中心处理器,在系统工作过程中可以高效的进行工作,并且能够灵活的为嵌入式控制系统提供相关方案。
的标准功能如下所示:8k字节,256字节,32位 口线,还包括看门狗定时功能,包括三个计数器,两个数据指针,时钟电路,全双工串行口。同时能够实现0Hz的静态工作,为了实现能源的节约,在系统中设置有节能模式,具体的模式有两种,分别是空闲模式与掉电模式。在系统处于空闲模式当中时,处理器停止工作,但是运行状态与串口可以继续工作。如果系统处于掉电模式工作状态下,系统会保存的状态,对振荡器进行冻结处理,系统停止所有的工作,直到对其进行复位。
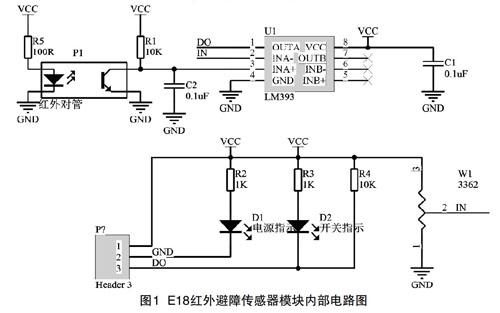
2.2 E18-D80NK-N红外避障传感器模块
是光电传感器,实现了发射、接收一体化。调制后,系统将光信号发出。为了降低可见光对周围环境产生的影响,可以使用反射光接收头对其进行解调输出。通过透镜使其能够对八十厘米距离以内的问题进行检测。使用电位器对障碍物进行检测调节,可以实现高精度的障碍检测功能。传感器所具有的优点有:成本低廉、探测距离足够长、操作简单方便等。[1]
E18红外避障传感器模块内部电路图如图1所示,其中R1电阻为分压电阻,将红外避障传感器检测到的障碍信息转化为模拟电压信号,模拟量信号接入LM393比较器后,即可与LM393比较器芯片2号引脚所接的分压电阻分压后的模拟电压进行比较,进而得出DO数字信号(即高低电平信号)。C1、C2为滤波电容,C1电容对电源进行滤波,让电源输出更稳定。C2电容对模拟信号进行滤波,保证模拟信号输出的稳定性。R2、R3均为限流电阻,来保护LED灯,防止LED灯烧坏,LED灯均为低电平有效。R5也为限流电阻,保护红外发射头,以防烧坏。使用限流元件可以保证系统稳定的工作,采用R4上拉电阻可以很好的解决这个问题,同时能够保证其他信号通过电阻钳位。保证LM393比较器输出的高低电平信号在与单片机引脚连接时电平信号的读取更加稳定。
2.3 按键电路模块
为了保证系统操作简单快捷,在系统外部设置轻触按键,轻触按键属于按键的一个种类,具体可以将其理解成是电子开关。在实际操作时,使用手指轻触对应功能即可实现操作,在该元件内部设置有弹力金属片。按键在人机交换中有着广泛的使用,所以选择合适类型的按键能够保证系统的稳定与安全,在设置引脚的时候可以将其设置为高电平,按键导通后,单片机引脚由高电平转换为低电平。进而实现对系统的手动输入。
2.4 L298N电机驱动模块
L298N驱动模块,采用ST公司的L298N芯片,功率部分的供电电压介于之间,属于电机驱动芯片(类型为双H),每一个H结构都能够向系统提供2A的电流输出,采用电源对控制部分供电,通过该模块的安装,能够实现对电机的直接控制,同时保证了对应输出的稳定提供,也使直流电机的速度能够方便地加以控制,支持为单片机电路系统提供电源。
直流电机控制信号真值表:
以电机A为例,高电平H:低电平:L。
输入信号功能:IN1=H;IN2=L:电机A正转。IN1=L;IN2=H:电机A反转。ENA=H;IN1=IN2:电机A紧急停车。ENA=L;IN1=X;IN2=X:电平电机A停车情况可以自由选择。
该模块通过实验证实了其具有稳定的工作性能,符合设计的标准。
2.5 BD681风扇驱动电路模块
散热风扇在工作的过程中将电能转化为动能,最终实现散热目的,在实际应用过程中,能够对系统的温度进行有效的调节。风扇的控制不能依靠单片机来实现,故选择大功率三极管BD6081来实现对马达的控制,电阻为限流电阻,限流作用,实现三极管的稳定工作。如果检测引脚处电平为高电平,则导通三极管,风扇启动,反则不启动。
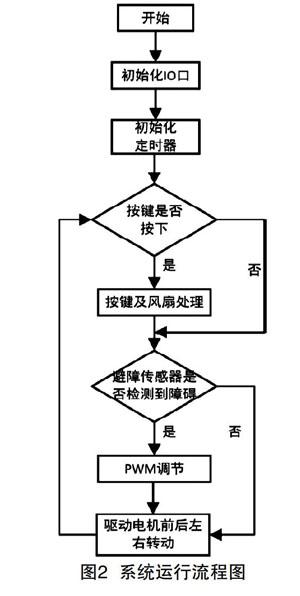
2.6 程序流程图
在进行程序编写与调试的过程中使用到了C语言与Keil uVision4工具,工作流程如图2。
参考文献
[1]田鹏,李泽滔.基于单片机的红外避障系统设计[J].自动化与仪器仪表,2015(06):40-42.
Design and Implementation of Sweeping Robot Based on Single Chip Microcomputer
LU Yi-wen
(Zijin College, Nanjing University of Technology,Nanjing Jiangsu 210046)
Absrtact:Sweeping robot is an intelligent sweeping tool, which can set and clean a certain area according to people's needs.?This paper introduces the hardware composition and obstacle avoidance principle of the sweeping robot, that is, to detect obstacles by red-wire obstacle avoidance sensor and control the motor steering to achieve obstacle avoidance.
Key words: STC89C52;MCU;E18-D80NK-N;infrared obstacle avoidance sensor
