工业机器人机械系统设计教学要点分析
2019-05-14韩建海郭冰菁李向攀
韩建海 郭冰菁 李向攀
摘要:为了满足企业在转型升级、快速发展背景下对机器人技术人才日益增加的需求,针对工业机器人机械系统设计教学存在的问题,以工业机器人机械系统的典型传动链分析为例,对机械系统设计的教学要点进行归纳总结,以便于学生理解与掌握机械系统设计的核心知识点以及学习过程中存在的抽象、不易理解的问题,这有助于提高课程的教学质量。
关键词:工业机器人;机械系统设计;传动链;教学改革
随着国家“机器换人”战略的实施和企业转型升级的推进,工业机器人的应用越来越广泛,社会对熟练掌握机器人工作原理,懂编程操作、维护维修和故障诊断的技术人员的需求也越来越大。因此,顺应教育部“新工科”的教学改革要求,开设机器人相关专业、培养社会急需人才的高校也越来越多,尤其是高职高专院校和应用型本科院校几乎均新设了工业机器人技术及应用专业。随着机器人技术的快速发展,工业机器人课程原有的教学大纲、课程体系、教学内容、教学方法以及师资队伍已难以适应创新型人才培养的需要。此外,机械本体的内部结构看不见、摸不着,电机如何驱动关节运动、传动链如何设计等问题,更是教学的难点,这些问题制约了学生对相关内容的理解和有效掌握。鉴于此,笔者以工业机器人机械系统的典型传动链分析为例,对机械系统设计的教学要点进行归纳总结,以期提高课程的教学质量。
一、工业机器人机械系统设计
工业机器人通常由机械系统、驱动系统、控制系统和传感系统四部分组成,其中机械系统是机器人的基础部分,相当于人的骨骼。这部分内容是有效、扎实地学习、掌握机器人技术的机械基础,其教学目的是让学生了解与掌握机械结构系统的总体组成、各关节配置特点、典型传动链方案设计、结构的演变与创新等内容。
工业机器人机械系统通常由机身(含基座)、臂部(含手腕)和手部三大部分组成。机身和基座相连,支撑臂部。臂部由大臂和小臂组成,大臂与机身相连,支撑小臂,小臂的末端安装腕部,并通过腕部上的法兰盘连接手部,手部的具体形状由实际应用来定。
在教学过程中,针对这三部分,教师要突出关节机构实现的自由度、关节布置、传动链的合理布局方案分析,并结合实验室中的六自由度机器人实体,让学生在课堂教学和实验教学中深入学习不同应用场合下的工业机器人机构、传动、驱动有机融合的一体化机械系统设计方法,为教师后续运动学、动力学分析章节的讲解及探究打下基础。
(一)机身
工业机器人的机身具有一个回转自由度,即腰部的回转运动。腰部要支撑整个机身绕基座进行旋转,在机器人6个关节中受力最大,也最复杂,其既承受很大的轴向力、径向力,又承受倾覆力矩,该关节应具有较高的运动精度和刚度。因此,腰关节多采用高刚性和高精度的RV减速器传动,RV减速器内部有一对径向止推球轴承,可承受机器人的倾覆力矩,能够满足在无基座轴承时抗颠覆力矩的要求,故可取消基座轴承。机器人腰部回转精度靠RV减速器的回转精度保证。
由于底座安装空间的限制,腰部电机多采用立式倒置安装。按照驱动电机旋转轴线与减速器旋转轴线是否在一条线上,可分为同轴式与偏置式两种布置方案。同轴式布置方案多用于小型机器人,采用减速器一级减速;偏置式布置方案多用于中大型机器人,采用齿轮传动与减速器结合的二级减速。
(二)臂部
工业机器人的臂部由大臂、小臂组成,具有2個自由度,大臂与机身相连的关节为肩关节,大臂和小臂相连的关节为肘关节。肩、肘关节承受很大扭矩(肩关节同时承受来自平衡装置的弯矩),应具有较高的运动精度和刚度。按照电机旋转轴线与减速器旋转轴线是否在一条线上,肩、肘关节电机也可分为同轴式与偏置式两种方案。以同轴式方案为例,电机与减速器同轴相连,均安装在小臂上,减速器的输出轴固定在大臂上端,减速器的外壳旋转带动小臂做相对于大臂的俯仰运动。偏置式方案中,电机轴线与减速器轴线向下偏置,电机通过一对外啮合齿轮做一级减速,减速器做二级减速后,其外壳带动小臂运动。
(三)腕部
工业机器人的腕部是连接手部与臂部的部件,起支撑手部的作用,手腕的自由度主要用于调整手部姿态,通常要求腕部能实现对空间3个坐标轴x、y、z的转动,即具有回转、俯仰和偏转3个自由度。关节型机器人主流手腕结构多采用RBR手腕,具有小臂旋转(R轴)、手腕摆动(B轴)和手腕旋转(T轴)三个自由度。对于小负载机器人,手腕3个关节电机一般布置在机器人小臂内部;对于中、大负载电机,手腕3个关节电机一般布置在机器人小臂的末端,以尽量减少小臂重力的不平衡。
小臂在结构上做成前后两段以实现小臂的旋转运动,对于小负载机器人,机器人R轴驱动电机布置在小臂后段,超过肘关节的旋转中心。R轴驱动电机通过谐波减速器的减速,其输出轴转盘带动小臂前段旋转,实现小臂的旋转运动。B轴和T轴驱动电机均沿小臂轴线方向布置。B轴驱动电机的输出,通过锥齿轮改变旋转方向后,由同步带将运动传递给谐波减速器,谐波减速器的输出轴固定,壳体旋转带动安装其上的手腕做摆动,实现B轴运动。T轴的运动传递与B轴相似,传动链为:锥齿轮—同步带—锥齿轮—谐波减速器—手腕。
二、典型传动链设计分析
传动链的设计对保证运动与动力的正确传递、实现机构的平衡、促进结构优化都是非常重要的,笔者以中大型负载机器人的腕部3个关节处的传动链设计为例,进行教学分析。
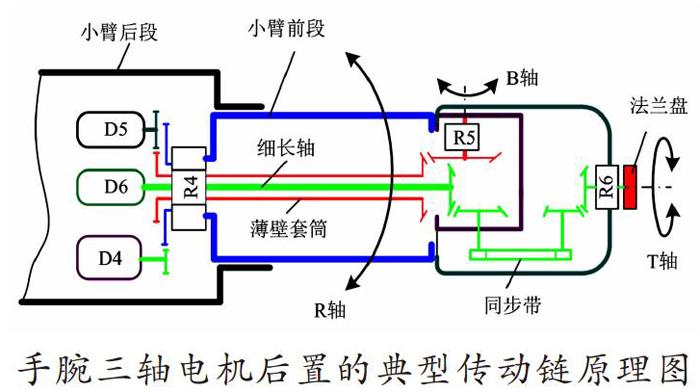
考虑到重力平衡问题,手腕三轴驱动电机尽量向小臂的末端布置,并超过肘关节旋转中心。手腕三轴电机可以布置成三角形,也可以布置在一条线上。下图为手腕三轴驱动电机后置的典型传动链原理图,三轴驱动电机内置于小臂后段内。R轴驱动电机D4的输出,通过中空型RV减速器R4,直接带动小臂前段相对于后段旋转,实现R轴的旋转运动;B轴驱动电机D5的输出,通过两端带齿轮的薄壁套筒,将运动传递给RV减速器R5,减速器R5的输出轴带动手腕做摆动,实现B轴的旋转运动;T轴驱动电机D6的输出,通过实心细长轴和1对锥齿轮,再通过同步带和1对锥齿轮,将运动传递给RV减速器R6,减速器R6的输出轴直接带动手腕法兰盘转动6,实现T轴的旋转运动。
三、机械系统设计的演变与创新
从1979年美国Unimation公司推出的第一台工业机器人Puma,到当前流行的工业机器人机械臂,机械本体结构、手腕结构和控制理论等方面并没有特别的、本质的变化,仅仅在结构上把Puma机器人向一边偏置的肩宽改变为向前布置,扩大了机器人正前方的工作范围。以下几个方面将是工业机器人机械系统设计未来的发展方向。
第一,模块化设计。机器人是由多级连杆和关节串联组成的多自由度的空间运动机构,机构设计向模块化、可重构方向发展。伺服电机、减速器和检测系统三位一体化,形成关节模块,将关节模块和连杆模块用重组的方式构造整机,可方便地设计出满足不同载荷和运动范围要求的机器人产品,减少设计周期,降低制造成本,有利于批量生产。
第二,高强度轻质材料。在材料选择上,新的高强度轻质材料是不错的选择,可以进一步提高机器人结构的负载/自重比。通常机器人小臂和腕部采用高强度铝合金,符合质量轻和易成型的要求。大臂采用组合焊件,用薄壁钢板围成空腔,在保证强度和刚度的前提下,追求重量轻、加工周期短、用材少。基座采用铸铁,吸振效果好、易成型。
第三,高传动精度。传动机构设计向结构紧凑、提高传动精度的方向发展,应保证传动路线短,提高传动与支承刚度,如:1、2、3轴采用RV减速器,突出刚性和扭矩的要求,4、5、6轴采用谐波减速器,突出质量轻和精度高的要求。同时采用RV减速器和交流伺服系统,使机器人机械系统成为免维护系统。
四、结语
工业机器人机械系统是机器人的支承基础和执行机构,计算、分析和编程的最终目的是要通过本体的运动完成特定的任务。机械系统是机器人设计的一个重要内容,其结果直接决定机器人的工作性能。笔者以工业机器人机械系统的典型传动链分析为例,对机械系统设计的教学要点进行归纳总结,从设计思路、多种设计方案及典型传动链实例的角度讲授工业机器人机械系统的设计方法,把抽象的机械系统教学难点进行核心内容的提炼,有利于工科学生对工业机器人机械系统设计的深入学习。
参考文献:
[1]雷静桃,刘亮,张海洪.“机器人学”课程教学改革与实践[J].实验室研究与探索,2013,(5).
[2]黄用华,李雪梅,莊未.理工科高校《工业机器人》课程教学改革浅析[J].科技信息,2012,(12).
[3]韩建海.工业机器人(第3版)[M].武汉:华中科技大学出版社,2015.
