基于时间优化与相位协调的路网交通控制研究∗
2019-05-13刘中原闫学勤
刘中原,闫学勤
(新疆大学电气工程学院,新疆乌鲁木齐830047)
0 引言
随着路网交通规模的不断扩大和道路条件的不断限制增大,基于固定绿灯时长并以固定周期循环执行的交通信号配时方案已经慢慢难以满足城市交通的需求[1−2].因而城市路网中应采用更为先进的智能交通控制系统[3],一方面可以均衡各路段的空间占有率,减轻路段拥堵;另一方面可以降低交通事故,减少车辆延误时间[4].
目前对交通控制系统的研究表现在综合利用先进的信息、检测和控制技术来发展更先进的交通信号控制系统和优化方法.文献[5]以相邻交叉口之间的车流量信息和预测剩余时间周期为模拟控制器输入,构成二级模糊控制器实现对控制子区的外层区域协调控制,但只完成了时间分配而没有对相位进行协调设计.文献[6-7]设计了路网分解算法,并采用基于固定带宽的干道协调控制方法,但路网分解可操作性较差,也未讨论相序性.文献[8]介绍了一种模糊控制算法,引入了资源分配的公平性原则,使得在任何场合都能达到合理科学的控制,但其控制对象比较适用于控制单交叉路口,并未对多干道的相位协调优化策略进行考虑,而城市交通路口的控制不仅仅是单一路口的控制,而是一个区域控制问题.
针对以上问题,提出了一种交通信号协调控制优化算法.首先,在掌握中心路口与各相邻交叉路口距离、交通流运行规律的基础上,完成对路网子区的建立.然后,结合模糊算法设计了一种新的包含内层单交叉口内部时间以及外层多交叉口之间的相位优化调整和多干道协调控制的路网交通灯信号策略.最后结合仿真实例,给出了综合考虑路网内部单交叉口时间和外层路网上相位协控信息以及最终控制效果.
1 路网分解
1.1 控制子区的划分依据
城市路网是一个比较繁杂的系统,若令其直接进行交通信号的协调优化,则会造成控制策略和实际应用时出现复杂度高,甚至控制效果不理想的情况.因此,对路网进行区域划分是很有必要的[9].目前城市路网的划分方法主要包括静态划分和动态划分两种方式.其中静态划分考虑的是道路类型、相邻交叉口间距、车流运行方式等静态数据,而动态划分则依据实时交通流量、各路口相位顺序、各路口周期时长等动态数据来划分控制子区[10].
单独考虑静态因素会导致子区划分灵活性差;而单独考虑动态因素又会造成路网特征的丢失.为更好的适应道路类型及现场数据的变化,采用动静因素结合考虑的子区划分方法,引入相邻交叉口关联度的概念.为简化子区划分复杂度,各交叉路口采取相同的周期时长,可以发现相邻交叉口之间的间距越远,其相邻交叉口关联度越小;而相邻交叉口之间交通流量越大,相邻交叉口关联度则越大.
对关联度进行区域阈值设置,当关联度计算结果或者所处区域位于关联区时认为两交叉口关联,将两相连交叉路口作为关联交叉路口,若处于关联区外时认为两交叉口独立.

式中Ci为两交叉口之间的关联区;Li为两交叉口间距耦合区;Qi为两交叉口流量耦合区.
1.2 控制子区的划分结果
鉴于子区应具有和路网相似的特征,从而可将整个路网控制转变为对子区的控制.考虑到子区面控方式下的主要矛盾是具有重要位置的中心交叉口与其关联交叉口之间的不协调控制导致的车辆拥堵问题.因此根据道路类型将路网子区初步划分为如图1所示的十字型,然后将不具有关联度的交叉口剔出子区单独控制.
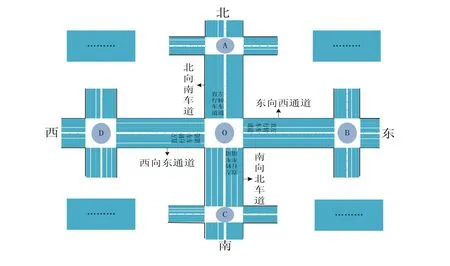
图1 影响关联度的因素以及子区类型Fig 1 The influencing factors of correlation and type of sub-zone
2 单交叉口模糊控制
2.1 单交叉口控制方案的实现
单交叉口模糊控制是指以模糊控制器为核心,通过提取到的交通流数据作为输入信号传送到模糊控制器中,根据控制方案,完成对单交叉口内部交通信号的控制,得到其控制流程图,如图2所示.
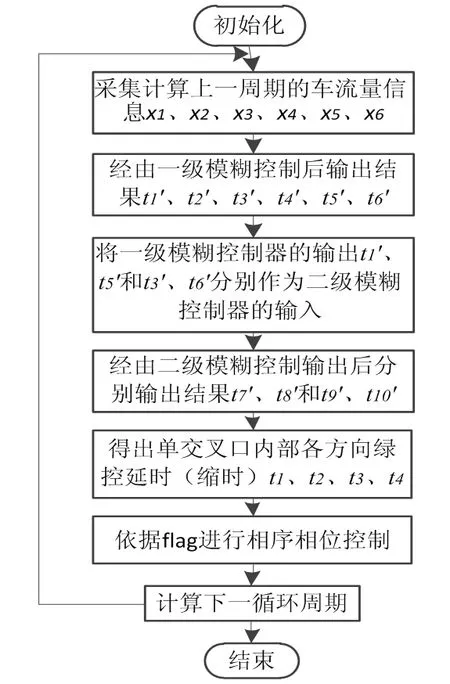
图2 单交叉口内部时间优化框图Fig 2 Flow chart of time optimization in the intersection
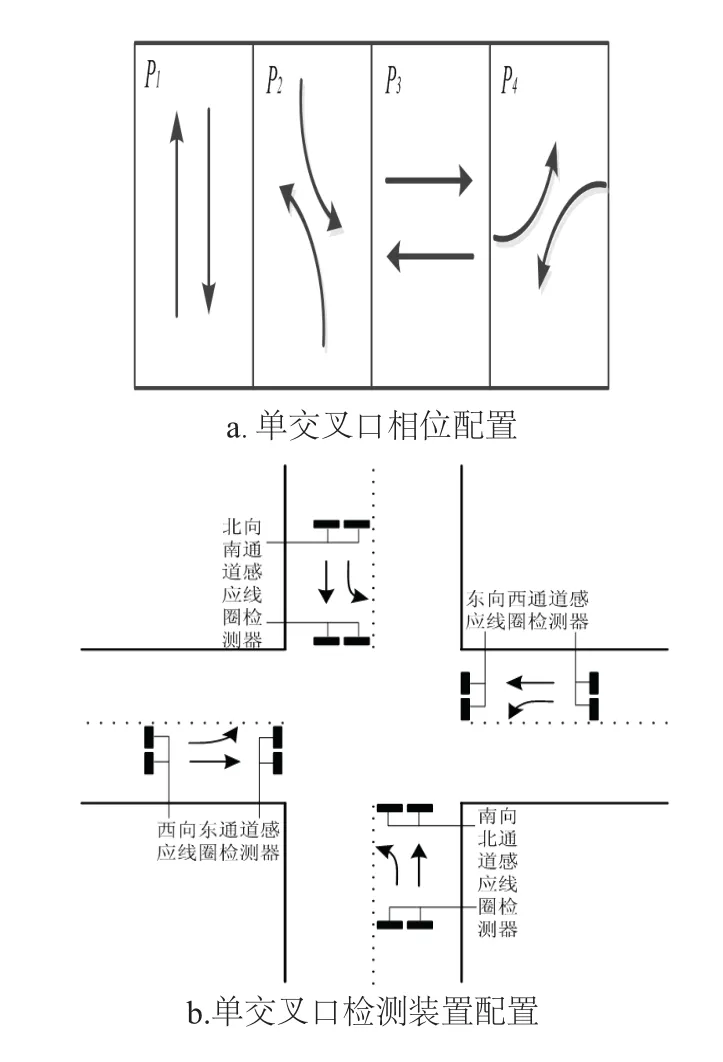
图3 单交叉口内部配置图Fig 3 Internal configuration diagram of intersection
为实现对各个方向上的交通流信息的提取以及单交叉口的控制,需要完成相位划分和交通信息采集装置的位置设置,其交叉口内部相位配置示意图及车辆检测设置[11]如图3所示.将交叉口内部相位设置为图3所示的四相位模式,通过在道路各方向车道上放置检测装置来提取一个周期中各方向的车流量,并以此作为绿灯延时(缩时)的根据.
2.2 单交叉口内层控制
系统双层控制的内层控制为单交叉口内部时间相位的控制,单交叉口模糊控制器原理如图4所示.
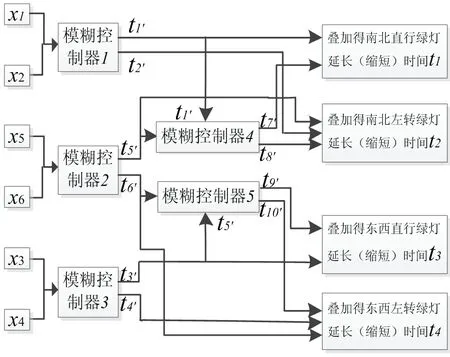
图4 单交叉口模糊控制器原理图Fig 4 Fuzzy control schematic of intersection
由图4可知该系统控制器为二级模糊控制,通过对输入变量的提取和模糊控制规则的设计,实现单交叉口内部绿灯时长的两层分配[12].以各车道和各方向上的车流量为依据,通过一级控制器实现对交叉路口中车道绿灯时长的辅助分配以及车道内部各方向绿灯时长的初步分配,然后令一级控制器的输出作为输入变量,通过二级控制实现将一级控制中车道上的配时结果分配到各方向上,通过与一级初步分配变量的叠加得到最终各方向绿灯时间延长(缩短)的分配.
其中,模糊控制器的输入变量满足公式(2)

式中a1,a2,a3,a4,a5,a6,a7,a8分别为一个周期南向北直行、北向南直行、南向西左转、北向东左转、东向西直行、西向东直行、东向南左转、西向北左转车道车流量;x1,x2,x3,x4,x5,x6分别为南北直行、南北左转、东西直行、东西左转、东西、南北方向上车流量.
模糊控制器的输出变量为

为满足交叉口总周期不变,即t1+t2+t3+t4=0,引入变量满足约束(4)

2.3 仿真分析
2.3.1 隶属度函数设计
单交叉口模糊控制系统的部分输入变量以及输出变量的隶属度函数如图5所示.在图5中,输入变量x2、x4、x5、x6的隶属度函数与x1、x3的结构相同,其论域分别为[0,24],[0,16],[0,64],[0,48];二级输入变量的隶属度函数与的图形相同,其论域分别为[−6,6],[−12,12];二级输出变量与隶属度函数相同.
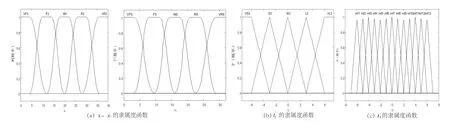
图5 隶属度函数设计Fig 5 The design of membership functions
2.3.2 模糊控制规则
表1 的模糊控制规则Tab 1 Fuzzy control rules of
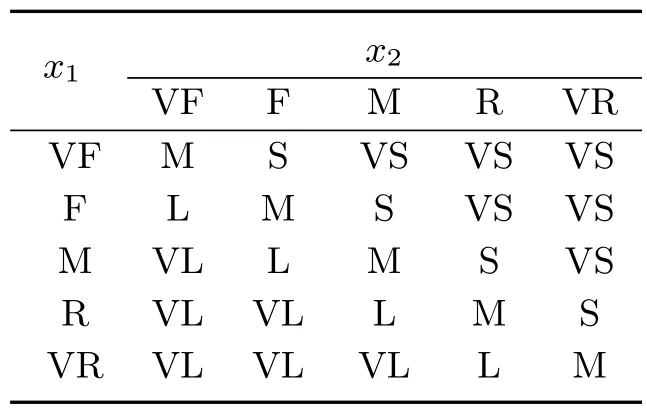
表1 的模糊控制规则Tab 1 Fuzzy control rules of
x1x2 VFFMRVR VFMSVS VS VS FLMSVS VS MVLLMSVS RVL VLLMS VR VL VL VLLM
表2 的模糊控制规则Tab 2 Fuzzy control rules of
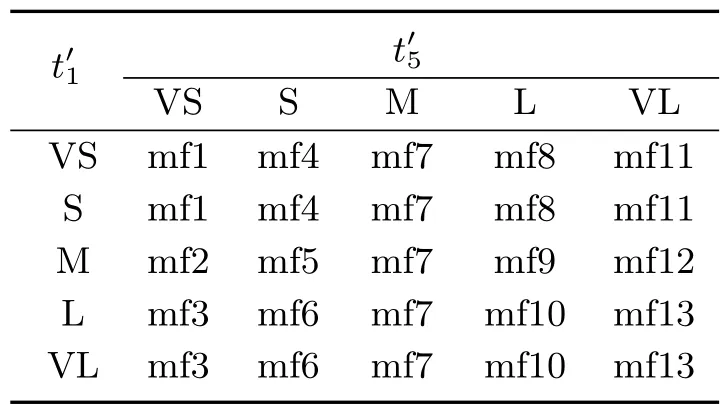
表2 的模糊控制规则Tab 2 Fuzzy control rules of
t 1 t 5 VSSMLVL VS mf1 mf4 mf7mf8mf11 Smf1 mf4 mf7mf8mf11 Mmf2 mf5 mf7mf9mf12 Lmf3 mf6 mf7 mf10 mf13 VL mf3 mf6 mf7 mf10 mf13
2.3.3 算例仿真分析
对该控制策略进行验证,选取了不同交通流下的7组案例,其仿真输出结果如表3所示.并依次采用定时控制策略和协调控制策略,对这7种案例状态下的车辆排队长度和周期内未利用通行时间两项指标分别进行仿真对比,其对比结果如图6所示.
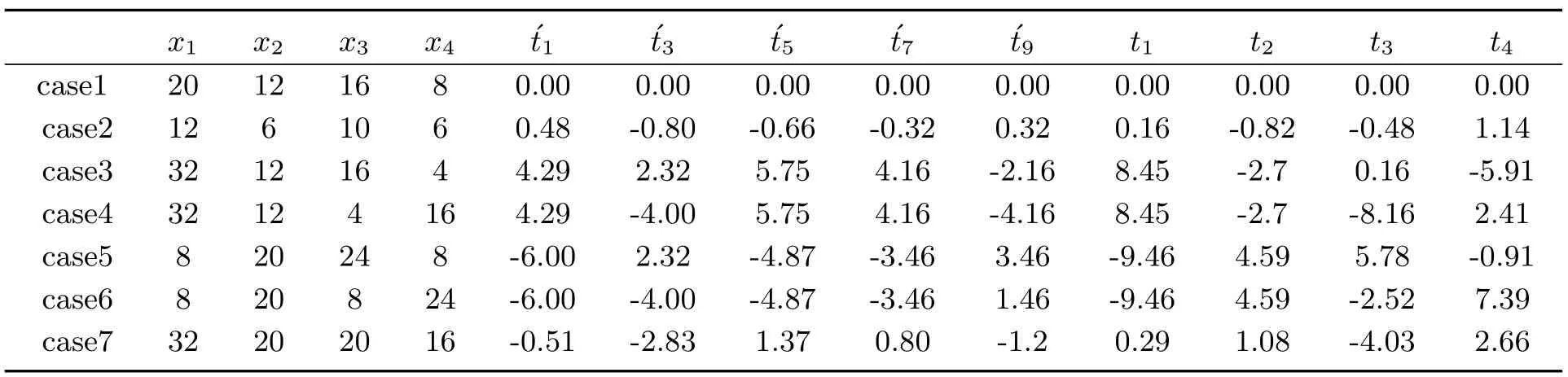
表3 各方向不同车流量下单交叉口模糊控制输出表Tab 3 Fuzzy control output table for the intersection with different vehicle flows in different directions
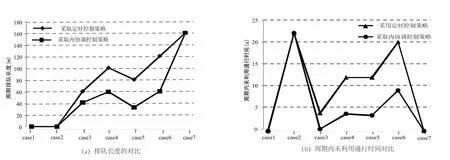
图6 不同控制策略下排队长度以及未利用通行时间对比Fig 6 Comparison of queue length and waste of time
其中case1为适中情况下各方向的车流量大小,以case1为基准,case2为各方向宽松(车流量较小),case3、4、5、6代表单车道或单方向拥挤(车流量大),case7为各方向拥挤,车流量大.
由图6可知,当道路上出现单车道或单方向拥挤时(case3∼6),该系统通过协调控制策略进行交叉口时间分配,与定时控制案例相比其排队长度和车辆在周期内未利用道路通行的时间都有了降低.其中排队长度分别减少了32%、41.75%、59.13%、49.9%,而存在滞留情况下周期内未用于车辆通行的时间分别减少了90%、68.1%、70.9%、59.55%,说明该策略能很好地减少车辆排队长度和增强交叉口通行效率;而在各车道均不拥挤(case2)以及各车道均过度拥挤(case7)时,该系统配时方案可以更好地协调控制各交叉口的拥堵程度.
综上可知,单交叉口控制策略能很好地解决交叉口内部单方向拥堵所导致的时间分配不合理,并能协调各交叉口不同的拥堵情况,根据各方向车辆拥挤情况对各方向绿灯时长进行有效的调整,对相对车流量大的车道或方向进行合理延时,同时对相对车流量小的车道或方向进行适度缩时.其目的是优化交通口内部时间分配,有利于节约时间成本,减轻拥堵状况.
3 区域外层控制
系统双层控制的外层控制为干道相位、相序控制,其干道相位控制框图如图7(a)所示.为了完成对子区中心交叉口与关联交叉口的协调,设计了直行干道的双向绿波带和非直行干道的单向绿波带,通过对以中心交叉口为枢纽的多干道交叉口上相位相序协调控制,从而使中心交叉口上的滞留车辆及时向外输出,旨在通过相序的配合减轻滞留问题.
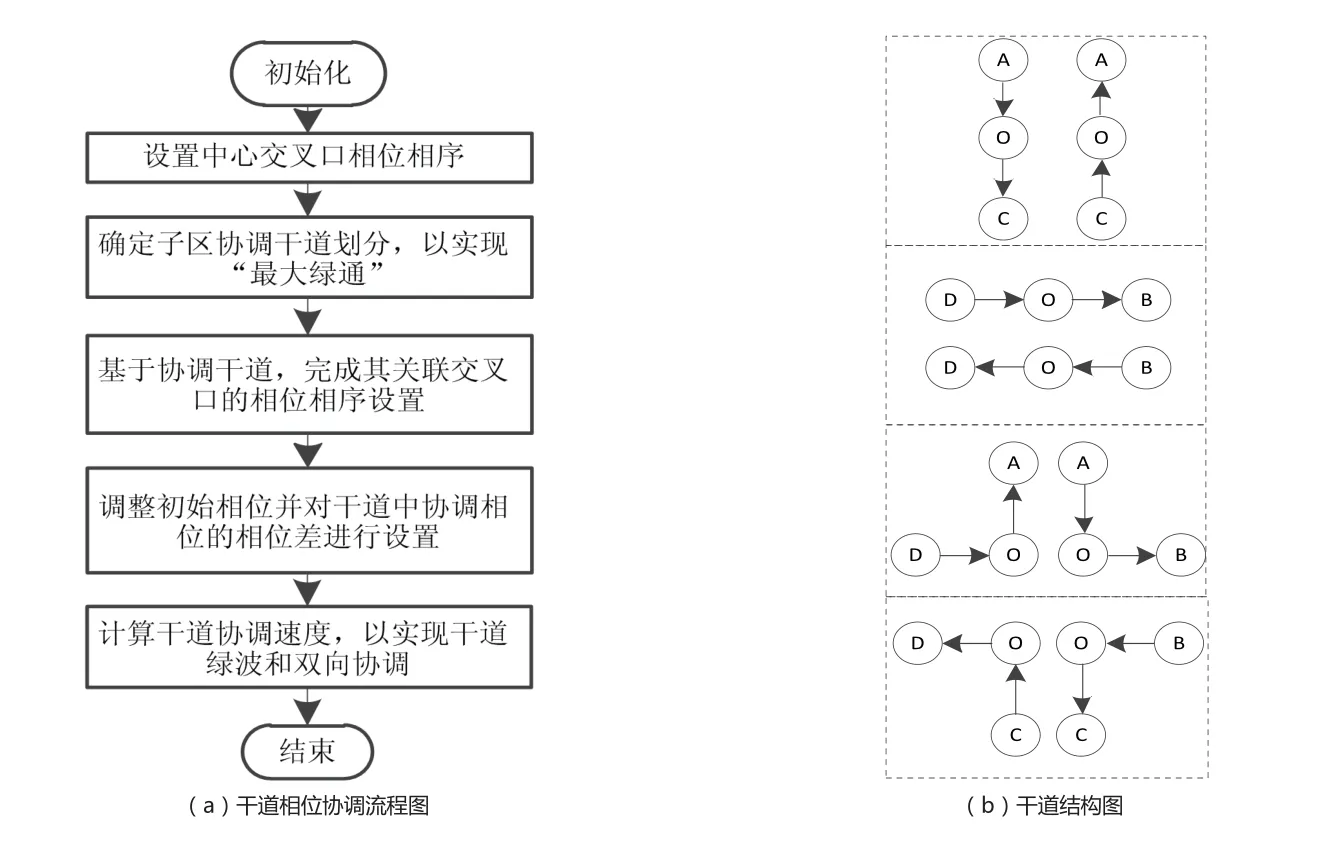
图7 干道相位协调控制及干道结构图Fig 7 The structure and flow chart of trunk’s phase coordination
3.1 控制方案的实现
由于路网划分后的子区控制依然是复杂的面控问题,因此基于关联度将控制子区再次分解成若干个干道.通过协调和优化干道上各路口交通灯的绿灯时长及相位相序从而完成对交通子区的控制,最终实现由线控取代面控的路网控制方式.为不失一般性,假设各相连交叉口均关联,对全干道下的相位协调进行设计,其子区全部干道模型如图7(b)所示.其中O为中心路口,A∼D分别为不同方向上的干道路口.
3.2 干道协调控制
3.2.1 干道协控条件
为实现子区的外层协调控制需从以下几个方面完成对系统的调整.首先,在干道协调过程中,为增大关联交叉口间的相位协调能力,一般对各交叉口采取相同的周期时间;其次,在内层控制策略的选择上,为防止相位差不合理,本系统对中心路口进行单交叉口模糊控制设计时,需对绿灯时间做合理的延长或缩短,而对其他交叉口采取常规控制;最后,在相序设计以及行车速度方面,调整其他路口相位启动顺序,并且对两交叉口间需要协调相位的车辆速度进行优化,能更好的实现多相位协调.
3.2.2 外层相位控制与速度协调
其干道间的协调相位时空如图8(a)、8(b)所示.其中P1、P2、P3、P4分别为南北直行、南北左转、东西直行、东西左转方向.v1为进入中心交叉口的最大速度,v2为离开中心交叉口的最小速度.
(1)相位协调
由于内层单交叉口系统设计过程中已实现部分前述条件,因此外层设计过程中仅需对速度和相位做进一步的优化和协调.为实现多干道多相位的协调控制,以O为中心交叉口,维持中心交叉口的相序不变,将关联交叉口相序调整为P2、P1、P4、P3,调整相序后中心交叉口的P1可与AC交叉口的P1形成协调绿通;P3可与BD交叉口的P3形成干道协调绿通;P2可与AB、CD交叉口的P4构成干道协调绿通;P4可与BC、DA交叉口的P2构成协调绿通.
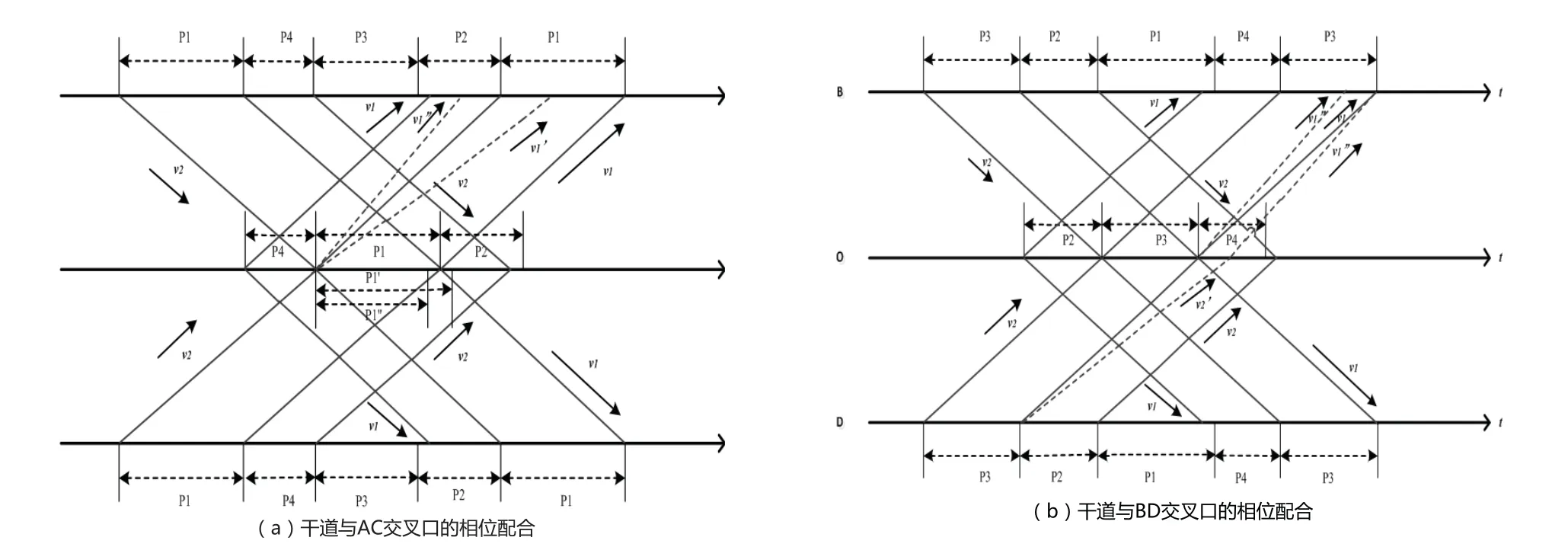
图8 干道相位协调示意图Fig 8 The phase coordinated diagram of truck road
(2)速度(相位差)控制
为了给协调干道提供更多的协调相位与更大的绿波带,通过调整相位差从而对车辆速度做进一步的调整,在满足约束速度的条件下,调整通行速度后中心路口的P1可以与AC交叉口的P2、P4形成部分绿通;P3可以与BD交叉口的P2、P4形成部分绿通;同时中心交叉口的P2、P4可分别与ABCD交叉口的P1、P3形成部分绿通.而当中心交叉口中存在延时或缩时时,系统将在速度约束范围内重新定义速度,并优先保护流量大的方向的协调效果,以最大限度的实现绿通.其速度约束公式为

4 路网区域协调完整控制
通过对道路各方向车流量的检测,基于子区形成、单交叉口模糊算法以及干道相位协调,得到基于时间优化与相位协调的路网交通控制完整流程图,如图9所示.选取了不同车流量下的几个案例,对子区相位控制前后进行仿真,观察交叉口周期内每辆车平均停车次数,如图10所示.由图10可知,在子区内采用内外协调相位控制以实现干道协调,可有效地减少控制区域内车辆的滞留时间:该策略在宽松车流(case1)、部分拥挤车流(case3、case6)以及过饱和车流(case7)情况下,周期内车辆的平均停车次数均有一定程度的改善,尤其是在单方向拥挤以及过饱和时停车次数有较大下降.由此可知采用区域干道相位协调后,有利于减少子区内车辆的滞留时间,同时增强对子区绿通的控制,最重要的是提高了车辆通行效率.
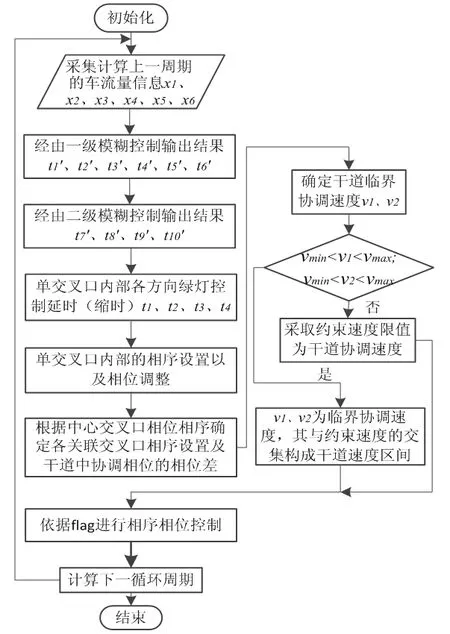
图9 子区交通灯时间优化与相位协调流程图Fig 9 Flow chart of time optimization and phase coordinate
5 结束语
本文针对路网子区划分对子区内部的时间分配以及相位协调问题进行了研究,提出了一种将路网分解与模糊算法相结合的子区内外层相位时间、相位类型和相序协调优化的控制策略.该策略将路网交通灯的复杂控制转换为对内层单交叉口和外层关联交叉口间的时间与相位的协调优化控制,改善了交叉口内层时间分配不合理以及区域外层效率不高的问题,并在一定程度上简化了路网系统的繁杂程度,具有较好的经济性和时效性.
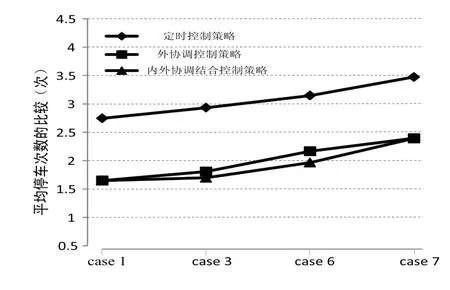
图10 相位协调前后平均停车次数的比较Fig 10 The comparison of the mean number of parking
