基于STC-89C52单片机的光伏组件双轴自动跟踪装置
2019-05-13西南交通大学信息科学与技术学院张知原张辉波赵桥李志强任奕霖
西南交通大学信息科学与技术学院■张知原 张辉波 赵桥 李志强 任奕霖
0 引言
在能源问题日益严峻的今天,太阳能因其清洁、可再生的优点,得到了世界各国的普遍重视[1]。利用光伏组件进行发电在某些区域已成为电力供应的主要来源之一[2]。目前,大部分光伏发电系统都是采用光伏组件固定不动的安装方式,导致其光电转换效率不高,对太阳能的利用不够充分。基于此,本文设计了一款加载有50 W光伏组件的双轴自动跟踪装置,该装置的机械部分采用齿轮传动及蜗轮蜗杆传动,控制部分则是采用STC-89C52单片机实现相关功能;通过安装12V/8A蓄电池,可实现在晴朗天气下对蓄电池充电的功能;并将具有自动跟踪功能的光伏组件与传统的固定式光伏组件的电性能进行了对比。
1 双轴自动跟踪装置的硬件设计
自动跟踪太阳的方式主要有2种:1)根据太阳的运行规律,通过所在地的位置和时间计算太阳的高度角和方位角,进而调整角度;2)根据光电传感器采集到的信号完成角度的调整[3]。这两种方式的结合可更加可靠地实现各种天气下的太阳的跟踪。基于实际情况,本文采用第2种方式。
1.1 机械部分的设计方案
本文采用的双轴转动装置的结构图如图1所示。该装置的构造为:步进电机1固定在底座上,其输出轴连接小齿轮,小齿轮与大齿轮啮合;大齿轮连接着主轴,主轴安装在底座上(主轴相对于底座可以转动),主轴前端与支撑装置相固定;步进电机2安装在支撑装置上,其输出轴连接蜗杆,与蜗轮啮合;蜗轮与传动轴固定并连接着光伏支架。
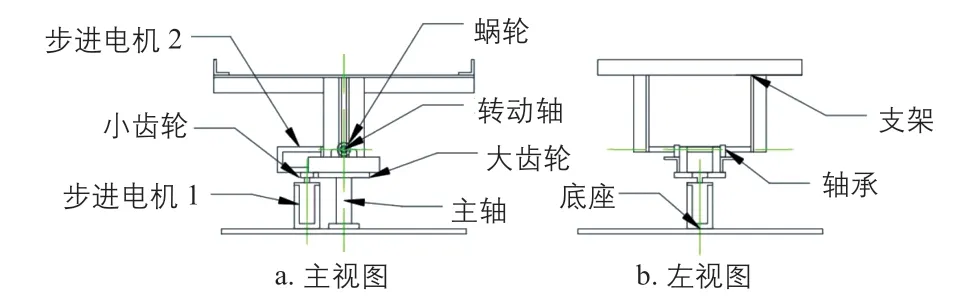
图1 双轴转动装置的结构图
本双轴转动装置采用2种传动方式:齿轮传动和蜗轮蜗杆传动[4]。水平方向的追踪所需的动力较小,采用成本与传动比相对较低的齿轮传动即可完成太阳方位角的追踪。但是,由于竖直方向上所需的动力相对较大,并且考虑到需要托载光伏组件,为了保证系统的稳定性和高精度,因此,竖直方向采用了蜗轮蜗杆传动,其自锁的功能也提高了装置的可靠性。
所有齿轮均选用POM材料。齿轮的具体参数为:模数m=1 mm,中心距a=60 mm,转动比i=5;初选小齿轮齿数Z1=20,则大齿轮齿数Z2=100;小齿轮分度圆直径d1=mZ1=20 mm;大齿轮分度圆直径d2=mZ2=100 mm。
主轴作为整个机械装置的传动与支撑结构,选用LY12铝棒作为主轴材料,主轴的直径为300 mm,长度为110 mm;转动轴的直径为100 mm,长度为250 mm。
1.2 自动跟踪装置的硬件电路设计
自动跟踪装置是根据光敏电阻传感器模块的输出电压来判断其所在角度上的光源是否与光伏组件垂直。因此,在光伏组件的4个顶点处安置光敏电阻传感器模块。
在实行此方案前,必须对光敏电阻在同一光强下的电阻值进行预判,消除不同光敏电阻之间的电阻值差异;差异消除后,再根据电压比较器返回的电平信号来判断光伏组件是否与太阳光线垂直,若光伏组件未与光线垂直,则采用双轴系统对光伏组件的位置进行调整,从垂直和水平两个方向的电压比较器返回的电平信号来确定光伏组件的方向是否是光电转换效率最高时的角度。
本装置使用的电路元器件包括主控制器(单片机STC-89C52)、电压比较器(LM339)、4个光敏电阻传感器、步进电机(J-5718HB3401)和步进电机驱动器。图2 为本装置的硬件结构框图。
信号接收部分的原理图如图3所示。光敏电阻传感器在不同光照强度下会有不同的电阻值,将不同的电阻值转化为相应的电压,输入到电压比较器进行循环比较,并根据比较结果输出高/低电平,随后将电平传输给单片机;单片机接收电平信号,然后控制步进电机旋转,进而使4个光敏电阻传感器接收到的光照强度趋于相同[5]。
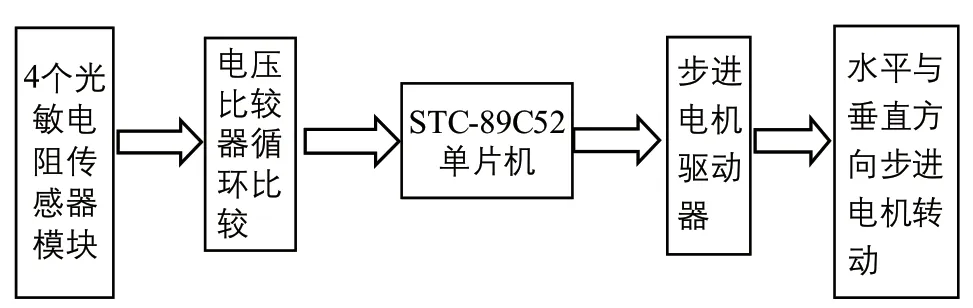
图2 硬件结构框图
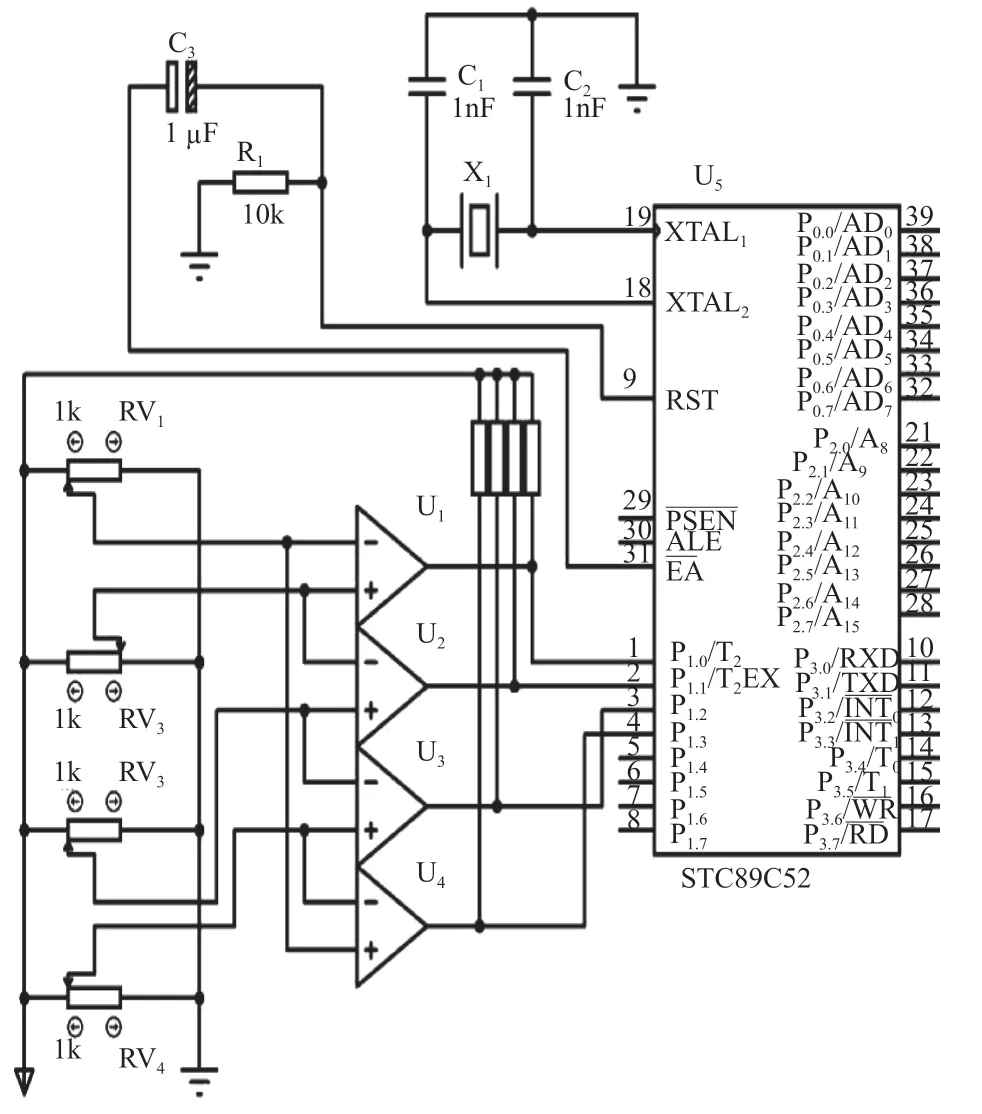
图3 信号接收部分的原理图
1.3 自动跟踪装置的软件设计
在初始阶段,光伏组件需与大地呈平行状态,这样可以避免光伏组件背对太阳而导致其无法正常工作。
自动跟踪装置的跟踪功能会执行2个程序:识别方向程序和电机转动程序。单片机会先执行识别方向程序,然后根据识别方向程序的结果执行电机转动程序。程序循环执行,直到4个光敏电阻传感器接收到的光照强度相同时,程序控制电机停止转动。主要程序流程图如图4所示。
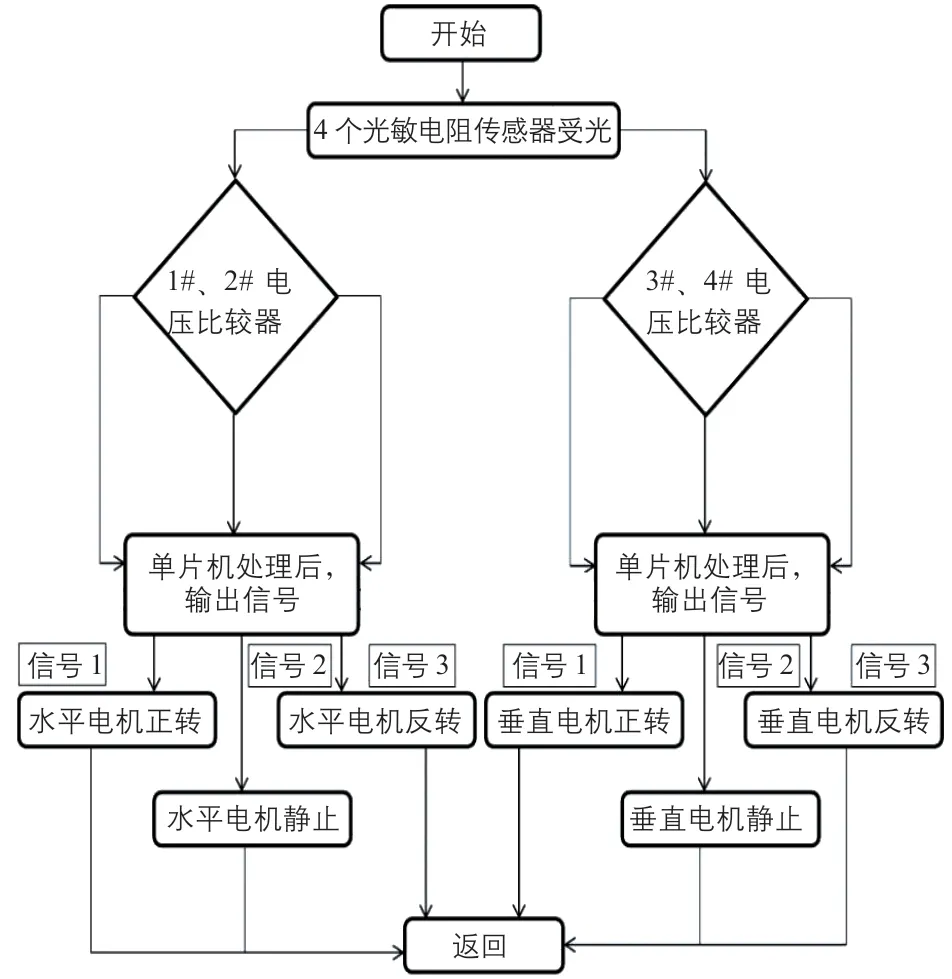
图4 主程序流程图
识别方向程序源于硬件设计,电压比较器LM339将模拟信号转化为数字信号后,将比较结果送至单片机的P1.0~P1.3接口(4个电压比较器输出的信号在代码中已定义),1#、2#电压比较器控制水平方向电机,3#、4#电压比较器控制垂直方向电机。
当1#电压比较器输出为高电平、2# 电压比较器输出为低电平时,单片机输出信号1,控制水平方向电机正转;当1#电压比较器输出为低电平、2#电压比较器输出为高电平时,单片机输出信号3,控制水平方向电机反转;当1#与2#电压比较器输出相同时,单片机输出信号2,电机静止。3#、4#电压比较器的工作原理与1#、2#电压比较器的相同,但控制对象不同,3#、4#电压比较器控制垂直方向电机。
电机控制程序会根据识别方向程序的控制字对电机进行相应的控制。1#与3#电压比较器输出为高电平信号时,单片机会根据这两个电压比较器输出的结果进行逻辑处理,触发两个电机正转的代码;同理,2#与4#电压比较器发出高电平的信号,单片机会触发两个电机反转的代码。当出现1#与2#电压比较器或3#与4#电压比较器输出相同电平的情况时,为了防止电机出现颤动的情况,单片机会令电机停止转动。在一次程序执行完毕后,单片机会清除控制电机转动的方向码及转动码,重新获取电压比较器的输入信号,控制电机持续转动,可以快速与太阳保持垂直状态。
当方向码和转动码确定后,单片机会输出方向信号和脉冲信号。从P0和P2两处的I/O接口处发送脉冲信号和方向信号给步进电机驱动器,步进电机驱动器再将信号进行放大,进一步控制步进电机的转动。
2 系统的实测结果
本文所设计制作的双轴自动跟踪装置如图5所示,该装置还可为蓄电池充电。在调试中发现,位于4个顶点处的光敏电阻传感器如果直接处于过强的太阳光照射下,其分别转换得到的输出电压基本相同,导致光伏组件无法自动跟踪。因此,用纸板对每个光敏电阻进行了部分遮挡,从而扩大了光敏电阻传感器安装点的光强差,进而提高了该装置的灵敏度。实践表明,采用此种方法后可较好地实现自动跟踪功能。
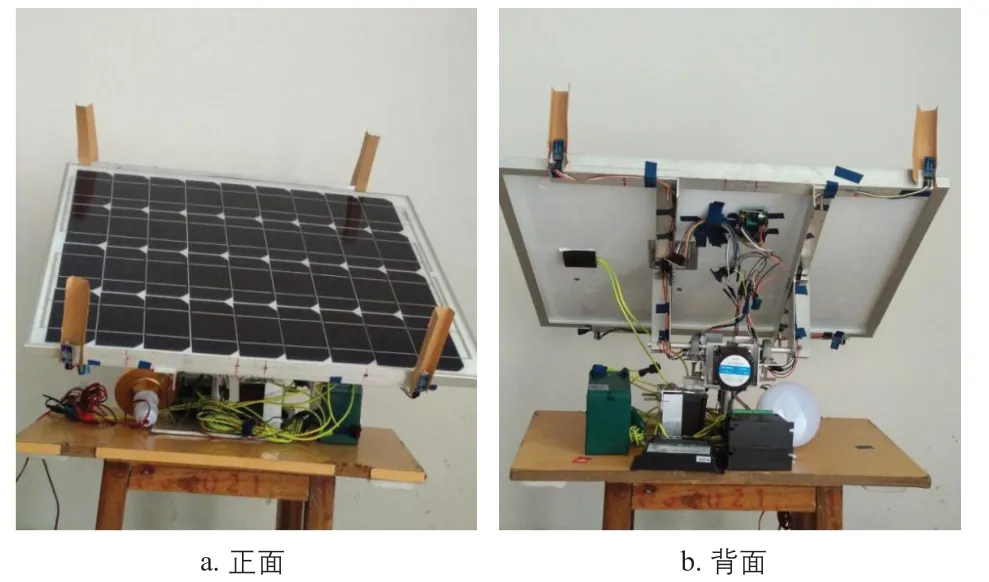
图5 双轴自动追光装置实物图
为了研究具有自动跟踪功能的装置是否能改善光伏组件的发电性能,对该装置在30 min内的相关数据进行了测量。
测量选在晴天的13:30进行,用光度计测量了30 min内地表的光照强度,采样频率为5 min/次。对双轴自动跟踪装置的短路电流和开路电压同样以5 min为间隔进行测量,并与传统光伏组件固定时的情况进行了对比,结果如表1所示。两项测试使用的是同一块光伏组件,排除了光伏组件转换效率不同引起的误差。其中,光伏组件的输出功率为短路电流和开路电压的乘积。

表1 光伏组件固定发电与自动追光发电的对比数据
图6为光伏组件固定发电与自动跟踪发电的发电功率对比情况。结合表1和图6可以发现,自动跟踪时的发电功率比固定时的发电功率提高了14.9%;同时,自动跟踪情况下的光伏组件发电功率更加稳定,这表明该装置的自动跟踪功能可使光伏组件与太阳保持垂直角度,提高发电效率。特别是随着时间的推移,固定装置感受到的光强呈下降趋势,导致其发电功率下降,而跟踪装置感受到的光强相对更加稳定,因此发电功率受到的影响不大,即使考虑到装置自身消耗掉的小部分功率,此自动跟踪发电系统的优势仍得到了体现。
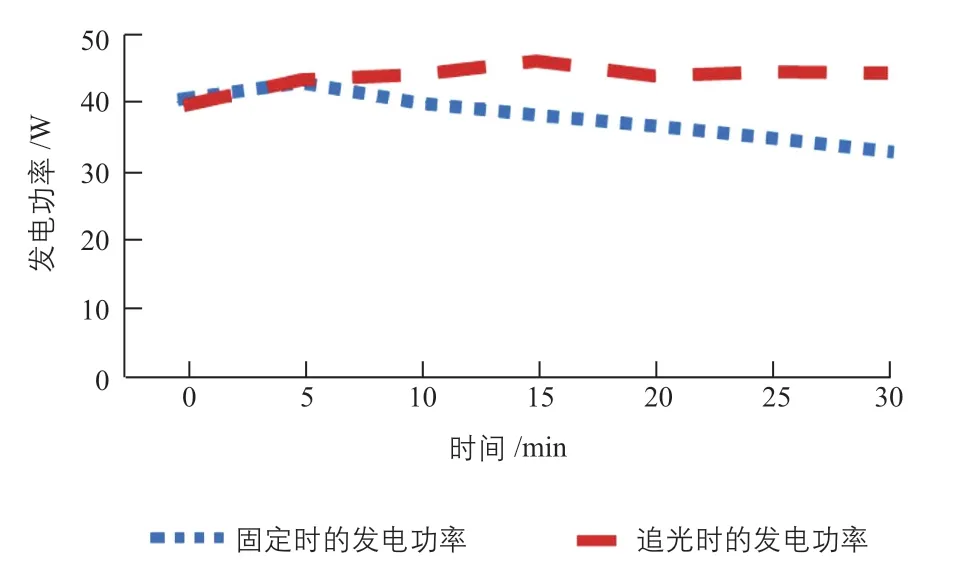
图6 固定发电与自动追光发电的发电功率对比
3 结语
本文设计了一套基于STC-89C52单片机的光伏组件双轴自动跟踪装置,该装置采用4个光敏电阻作为传感器,以单片机STC-89C52作为控制核心,可根据太阳的位置自动调整角度。通过对同样一套装置在固定与自动跟踪两种模式下的发电性能的对比可以发现,自动跟踪模式的发电功率更高、更稳定。实验结果表明,此装置可为光伏组件的安装方式提供一定参考。
