小型消费级无人机快速高精度估算地物高度
2019-05-10潘天力杨胜天赵长森
潘天力,杨胜天,2,相 华,赵长森,2※,赵 瑾
(1. 北京师范大学 地理科学学部 遥感科学国家重点实验室,北京 100875;2. 北京师范大学 水科学研究院城市水循环与海绵城市技术北京市重点实验室,北京 100875;3. 济南市水文局,山东济南 250013)
0 引言
利用高分遥感数据获取地物结构信息是一项重要的课题,其中地物高度是地物结构信息中非常重要的一个部分[1-4]。目前通过遥感反演地物高度的方法主要有立体像对法[4-6]、激光测距法[7]以及阴影测高法[8-10]等。其中,立体像对法需要两张或两张以上的照片,经常会碰到图像难以匹配的问题[5-6,11]。激光测距法则设备昂贵,成本代价高,目前难以在实际中应用[12-13]。而阴影测高法,只需要单幅影像即可快速提取建筑物高度,具有更强的适用性[9-10]。
无人机低空遥感作为一项新兴技术,能够提供大量高分辨率航拍照片,其精度可达厘米级,尤其是小型消费级无人机,能够快速获取大量高分辨率地物阴影照片来计算地物高度[14]。然而,目前利用小型消费级无人机一般都利用pix4d 等软件利用SIFT 与Sfm算法生成数字表面模型(Digital Surface Model,DSM)[14],利用DSM 来提取所要量算物体的高程[15],而这种方式对飞机的航高与其搭载的传感器要求较高,并需要在飞行的同时在地面布设控制点,因此目前很少有利用该类无人机实际测量建筑或植被高程的研究[16]。针对目前利用影像上的阴影反算出对地物的高度主要针对卫星数据[8-10,17],并摆脱传统无人机获取地面地物高度需要布设控制点的情况,文章提出一种基于无人机厘米级高分辨率图像阴影推算地物高度的方法。
该文选择了地物种类丰富的农业区,分无人机传感器是否拍摄到阴影的全部区域2种情景采取不同的高度计算公式,并用实际高度和传统无人机测高度方法生成的数字表面模型做对比,来验证方法的可靠性。
1 数据与方法
1.1 数据
研究选取济南市长清区小屯水库周边农业区(图1)开展精度验证实验,其经度跨度为116°42′38.25″E~116°43′48.58″E,纬度为 36°26′41.91″N~36°27′31.98″N。研究区视野广阔,卫星信号不受干扰,人类活动少,有利于无人机的飞行实验。该文在研究区选取了15 个地物进行高度估算,其中包括水利设施,车,居民房屋,树,农田设备以及塔共6 类(如表1)。并利用无人机对各地物进行了多角度拍摄。对拍摄到的照片利用Pix4Dmapper 软件进行处理,获得了带有地理坐标的数字正射模型(Digital Orthomatic Model,DOM)与数字表面模型(Digital Surface Model,DSM),并利用DOM 对无人机未拼接的照片进行地理矫正赋予其地理坐标以供后续坐标计算。

图1 研究区位置Fig.1 The study area

表1 研究区各地物高度数据Table 1 Height data for each object in the study area
研究使用精灵3 专业版(Phantom-3-pro)无人机获取观测区影像,该类无人机按应用领域属于小型消费级(图2),具有重量轻、成本低、灵活、便携、快速等优势。该实验搭载DJI-FC300X 普通相机,视场角为94°,图像大小为4 000 像素×3 000 像素,分辨率为72 dpi。具体的无人机基本参数如表2。

图2 无人机照片及野外工作照Fig.2 UAV photograph and field work

表2 无人机基本参数Table 2 UAV basic parameters
1.2 方法
该文首先利用前人提出的太阳高度角与太阳方位角计算公式[18-19],其次根据高度角与方位角的定义[20-22],利用无人机照片内记录的经纬度与视场角等参数计算拍照时无人机传感器的高度角与方位角。最后,利用无人机航拍照片水平方向上具有高精度的特点[14]提取物体阴影长度,根据无人机传感器是否拍摄到阴影的全部区域分2 种情景,情景一为无人机传感器能观测到物体的全部阴影,情景二为无人机传感器只能观测到物体的部分阴影,采用不同的方法计算地物高度。
1.2.1 太阳高度角与太阳方位角计算方法
大量研究表明,地球上任意观测地的太阳高度角与方位角与观测地的纬度、太阳直射纬度、时刻(太阳时角)有关[23-24]。在此基础上,Woolf 和赵俊生等[18,25]利用经纬度和日期分别提出了计算太阳高度角α(°)和太阳方位角γ(°)的方法如下。

式(1)中φ 代表观测地纬度(°),D代表太阳赤纬(°),h代表太阳时(°)。为了精确计算太阳高度角,该文在计算太阳赤纬与太阳时将地球自转的岁差也纳入考虑,如式(3)与式(4):

式(3)~(4)中,σ(°)是太阳黄经,T(h)观测时间,M(时)为正午时间,L(°)是观测点的经度,d(°)是观测日期在该年中的角度数值形式,例如1 月1 日对应的d为 0,3 月 21 对应的d=79×(360/365.2422),为 77.8664°。
为便于分析,该文定义高度角的取值范围为0~90°,并定义计算方位角时正北方向为0°,顺时针方向为正,逆时针方向为负,在正南方向时方位角为180°。
1.2.2 无人机传感器高度角与传感器方位角计算方法
传感器在天空中的位置可以用传感器的高度角和方位角来表示,传感器高度角是观测点与传感器的连线和地平面的夹角,传感器方位角是观测点与传感器在地面的投影的连线和正北方向的夹角[22]。无人机传感器的高度角与方位角决定了其获取影像的阴影形态[26]。为了简化计算,该文假设建筑物处于平原地带,四周地表平坦,无地形因素的干扰,建筑物外部结构比较简单且垂直地表。该文利用无人机照片航拍时记录的相机经纬度信息来计算观测物体与无人机的高度角和方位角,角度的定义如图3所示。
传感器高度角的计算方法如图4 所示,A 是无人机在地面上的投影,B 点是所要观测的物体,C 是照片相框点(即照片视场角所对应的拍摄点)。由高度角的定义可知以A点画圆,该圆上的任意点高度角都相等。该文根据无人机航拍照片上各点的投影坐标,利用已知的传感器视场角θ,求得无人机的相对地面的航高并进一步计算得到观测点的无人机传感器高度角。按照图4 中标注的点名,设各个坐标分别为(xA,yA),(xB,yB),(xC,yC),利用式(5)来计算传感器高度角β。

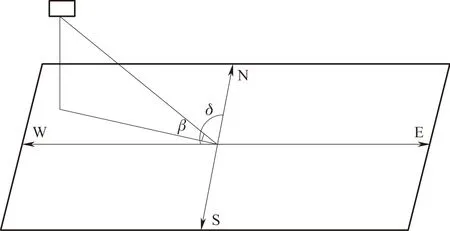
图3 传感器高度角与方位角示意图,β 为传感器高度角,δ 为传感器方位角Fig.3 Sensor height angle and azimuth diagram,β is the sensor height angle,δ is the sensor azimuth angle
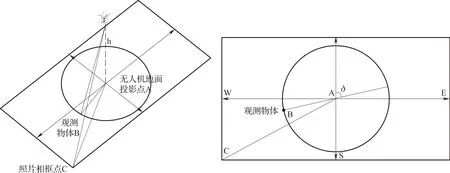
图 4 传感器高度角与方位角计算示意图Fig.4 Schematic diagram of sensor height angle and azimuth angle calculation
根据图4 与传感器方位角的定义,并遵照前文中规定的正北方向为0°,顺时针方向为正,可以得到传感器方位角的计算公式:

1.2.3 物体阴影长度计算物体高度方法
研究选取的观测物体大多位于平地,其阴影在地面无偏移现象,且外部结构简单规则。为了消除影像算法提取阴影带来的误差[27],该文通过人工目视解译阴影,按照无人机能否观测到物体的全部阴影范围,分两种情景利用阴影长度计算物体高度,情景一为无人机传感器能观测到物体的全部阴影,情景二为无人机传感器只能观测到物体的部分阴影。其示意图如图5。
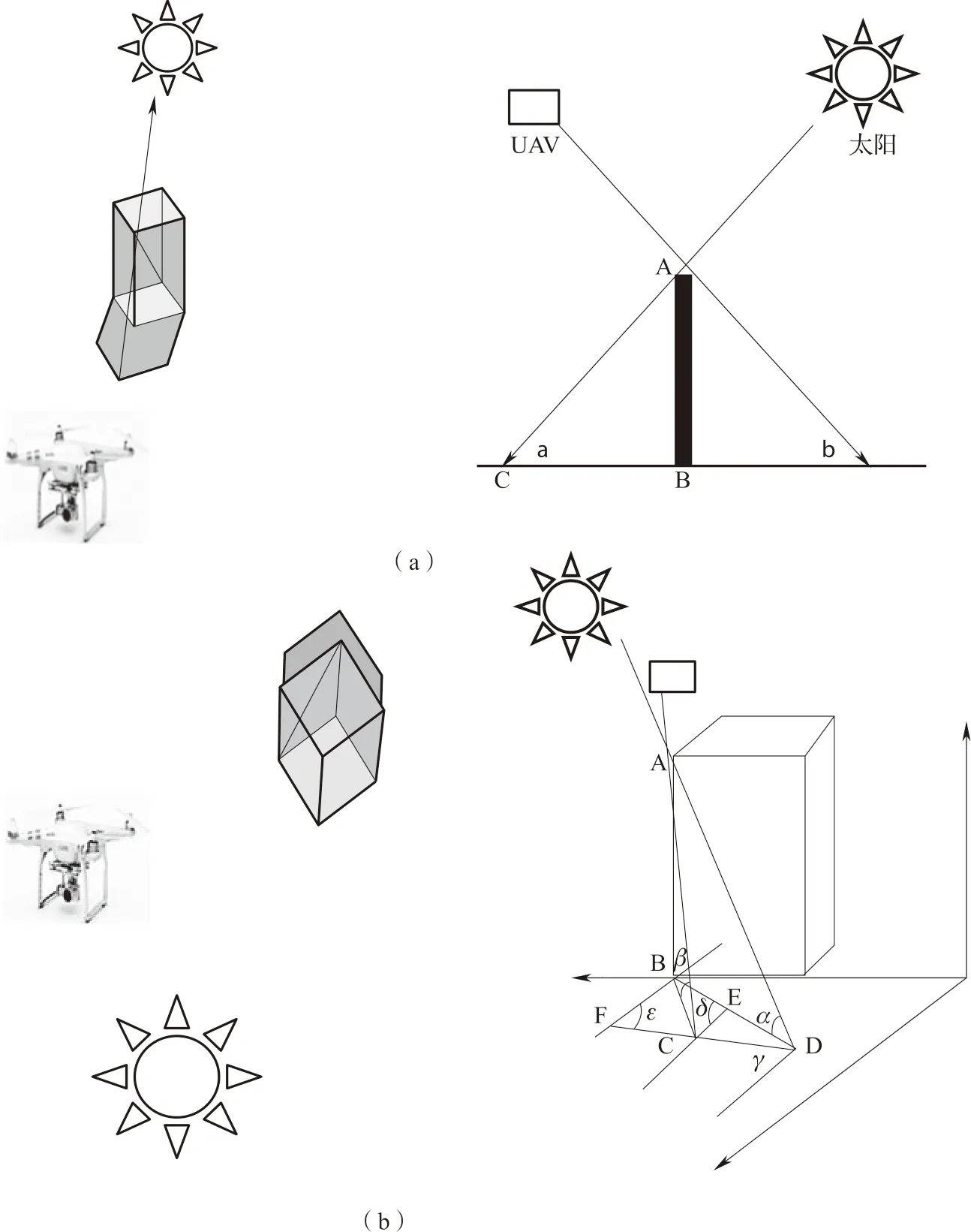
图5 (a) 无人机传感器观测到物体全部阴影示意图 (b) 无人机传感器观测到物体部分阴影示意图Fig.5 (a) Schematic diagram of the full shadow of the object is observed by the UAV sensor(b) Schematic diagram of the part shadow of the object is observed by the UAV sensor.
根据图5(a)示意图的情况,传感器可以拍摄到全部阴影区域,可以根据谢军飞等与陈亭等提出的方法[6,28]即式(7)可以得到观测物体的高度计算:

式(7)中,BC为影像上观测到的阴影长度,通过统计阴影的像元个数然后乘以像大小得到,α为太阳高度角。
而当无人机传感器不能观测到物体的全部阴影时,如图5(b)所示,B 为观测物体的底部,BD 为真实的阴影长度,需要利用传感器拍摄到的阴影长度CD 来推算。该文采用冉琼等以及Guida 等[29-30]所提出的基于阴影长度计算建筑物高度公式:

式(8)中,α 为太阳高度角,β 为无人机传感器高度角,γ 为太阳方位角,δ 为无人机传感器方位角,ε 为建筑物方向与阴影延顺时针方向的夹角。
2 结果与讨论
该文首先利用小型消费级无人机对观测物体规划航线进行拍摄,基于无人机航拍照片记录的GPS 信息计算出太阳与无人机传感器的高度角与方位角,以此为基础分太阳与无人机传感器在观测物体的同侧或异侧两种情景计算观测物体高度。其次利用Pix4DMapper 软件对航拍照片进行拼接获取数字表面模型(DSM)提取观测物体高度,最后将阴影计算出的观测物体高度与DSM 提取的观测物体高度与现场实测高度进行对比来分析误差。
2.1 基于研究区经纬度计算太阳高度角和方位角
当使用卫星数据来作为数据源提取阴影计算地物高度时,常以研究区中心点经纬度代入公式(1)~(4)来作为所有地物点的太阳高度角和方位角。而该文为了实现精确计算高度角与方位角,选择每个地物的中心点的经纬度分别进行计算。为了实现该目标,首先利用Pix4DMapper 对航拍照片进行拼接获取数字正射模型,其次利用数字正射模型对无变形的原始航拍照片在ArcMap 中利用GeoReferencing 工具对其进行地理矫正,使其获得地理坐标用于计算太阳与传感器高度角与方位角。将各地物中心点的经纬度带入公式(1)和公式(2)并联立公式(3)与公式(4),得到研究区各地物的太阳高度角与太阳方位角如表3,以供后续利用物体阴影长度计算其高度。
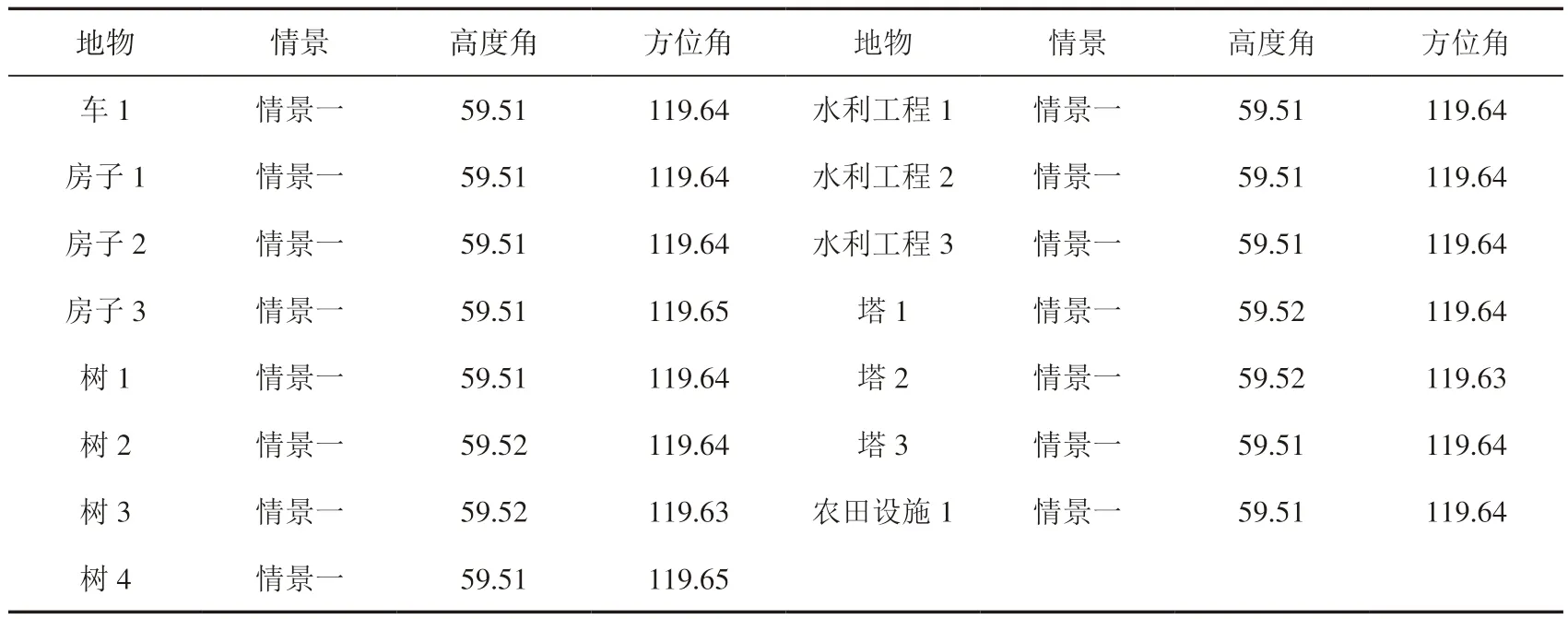
表3 各地物对应的太阳高度角与太阳方位角Table 3 The solar elevation angle and the solar azimuth corresponding to each object 单位:度
2.2 基于无人机相片信息经纬度计算太阳高度角和方位角
在得到太阳高度角与方位角之后,该方法还需要提取无人机传感器相对各个地物的高度角与方位角。首先,针对无人机传感器能否观测到物体的全部阴影分两种情景各自选取了1 张照片,其次,利用具有研究区的数字正射模型在Arcmap 软件中地理矫正选取的无人机航拍照片,并赋予其UTM 投影坐标[31-32]。最后,根据航拍照片提取各地物的地面点坐标与照片相框点坐标,并将照片中记录的拍摄时传感器坐标带入公式(5)与公式(6)得到各地物点的无人机传感器高度角与方位角如表4。

表4 不同情景下无人机传感器高度角与方位角表Table 4 UAV sensor elevation angle and azimuth table in different scenarios 单位:度
综上所述,该文利用30 张无人机航拍照片信息成功计算出了15 个研究区典型地物的太阳以及无人机传感器高度角与方位角,为利用阴影反演物体高度提供了数据基础。
2.3 地物高度计算
结合前文中计算得到的太阳以及无人机传感器高度角与方位角,该文通过目视判断航片是否拍摄到地物的全部阴影,分两种情景,采用不同的公式计算地物对应的高度,并用实际值对比,验证其计算精度。
当航拍照片上能够显示地物的全部阴影区域时,即为情景一时,该文采用公式(7)来计算其高度。而在情景二的情况下,无人机无法拍摄到地物的全部阴影时,采用公式(8)来计算高度。在得到估算高度后,用实际高度和Pixe4DMapper 拼接获得的DSM 提取的高度差与其对比分析误差,如图6。

图6 利用阴影估算地物高度精度分析图Fig.6 Analysis of estimated height accuracy
图6 中,圆形点代表情景一下估算的地物高度,三角形点代表情景二下估算的地物高度,方块点代表利用DSM 提取的地物高度,黑色虚线是1 ∶1 线。根据该图可以初步发现,利用DSM 提取的地物高度误差相较于情景一与情景二的都较大。经计算,情景一估算高度与实际高度平均误差为0.88 m,平均相对误差为12.25%,平均均方根误差(RMSE)为1.22 m,估算高度与实际高度的配对t 检验p 值为0.38,即估算高度与实际高度无显著差异;情景二估算高度与实际高度平均误差为0.79 m,平均相对误差为13.28%,RMSE 为1.13 m,估算高度与实际高度的配对t 检验p 值为0.68,估算高度与实际高度也无显著差异;然而利用DSM 提取的地物高度与实际高度的平均误差为1.86 m,平均相对误差为29.56%,RMSE 为2.24 m,估算高度与实际高度的配对t 检验p 值为0.02,有显著差异,不可以用于提取地物高度信息。上述结果表明,利用阴影计算的地物高度精度比利用DSM 提取的地物高度高,且情景一计算结果要略优于情景二计算结果。
为了验证该方法是否在不同高度都有一样的适用性。在上述计算结果基础上,针对物体的实际高度按照小于5 m 与大于5 m 分为两类进行统计,得到结果如图7 所示。

图7 (a)实际高度小于5 m 地物高度估算精度分析图 (b)实际高度高于5 m 地物高度估算精度分析图Fig.7 (a)Accuracy analysis of the height estimation of the object height less than 5 m(b)Accuracy analysis of the height estimation of the object height higher than 5 m
对比图7(a)与图7(b),实际高度小于5 m 的地物无论利用在情景一还是情景二下,估算精度都不如实际高度大于5 m 的地物。经计算,实际高度小于5 m 的地物,情景一下的估算平均相对误差为16.76%,估算高度与实际高度的t 检验p 值为0.50,情景二下的估算平均相对误差为18.68%,估算高度与实际高度的t 检验p 值为0.02,即当地物高度小于5 m 时,在情景二下估算的地物高度难以代表实际高度;而对实际高度高于5 m的地物,情景一下的估算平均相对误差为8.31%,RMSE 为1.59 m,估算高度与实际高度的t检验p 值为0.51,而情景二下的估算平均相对误差为8.55%,RMSE 为1.46 m,估算高度与实际高度的t 检验p 值为0.81。并根据图7(a)发现,分布于1 ∶1 线下方的点与分布在1 ∶1 线上的点,点数比为9 ∶5,在图7(b)这个比例则为11 ∶7,这表明本文的估算结果是偏小的。
综上所述,利用阴影长度能够较好的估算物体高度,其估算精度高于使用DSM 的方法,并更适用于实际高度高于5 m 的地物。
2.4 讨论
该文提出了利用阴影长度能够较好地估算物体高度,但其估算结果偏小,这与前人的许多结果相似。Bolter 等[31]在其利用阴影估算城市楼高时发现,小的建筑物高度往往被低估。在田新光等[26]的研究中,其抽样调查的所有计算高度结果全部小于实际高度结果。Liasis 和Stavrou[10]的研究数据中,15 个试验计算点中,有10 个反演高度小于真实高度。不仅如此,其结果与我们的阴影计算高程更适用于实际高度高于5 m 的地物相类似,他们的数据结果中,实际高度小于150 m 的地物整体估算精度要低于实际高度大于150 m 的地物。
而对于该文指出的利用航片阴影计算高度要优于航拍照片后经拼接运算得到的DSM,袁修孝等[33]的研究中有着较好解释,他们的研究指出机载POS 系统测定的未经检校的像片外方位元素进行直接对地目标定位的精度很低,且带有明显系统误差,至少需要利用带有1 个平高地面控制点的检校场进行检校才能消除系统误差。因此,该文所提出的小型消费级无人机高分辨率照片阴影快速获取地物高度的方式能够在一定程度上替代传统无人机获取DSM 测地物高度方法。
3 结论
研究应用小型消费级无人机高分辨率航拍照片,根据照片上是否呈现了地物的全部阴影区域分两种情景来快速推算其高度。通过与实际高度以及传统无人机拼接获取的DSM 提取的地物高度做对比,得出了如下结论。
(1)当无人机传感器能拍摄到地物阴影的全部区域时,阴影估算高度与实际高度平均误差为0.88 m,平均相对误差为12.25%,而当无人机传感器只能拍摄到部分阴影区域时,平均误差为0.79 m,平均相对误差为13.28%。两种情景下估算地物高度的精度都很高,该文提出的方法能够实现小型消费级无人机快速计算地物高度的目的。
(2)使用无人机传统测高方法生成数字表面模型提取的地物高度平均误差为1.86 m,平均相对误差为29.56%,在没有地面控制点的检校场进行检校的情况下,该种方法计算地物高度精度不如该文提出的无人机阴影测高发。
(3)实际高度小于5 m 的地物无论利用实际高度小于5 m 的地物无论无人机照片能否拍摄到阴影的全部区域,估算精度都不如实际高度大于5 m 的地物,即该方法对于高度较高的地物更适用。
综上所述,小型消费级无人机能够利用地物的阴影长度来快速高精度计算其高度,将该类无人机测量地物高度推广到实际应用层面,并丰富了阴影测高法的数据来源,为遥感快速获取地物结构信息提供了一种新的思路。