基于Arduino全自动化物料搬运机器人的设计与优化
2019-05-10陈祥龙刘恩昌姚文博华北水利水电大学机械学院河南省郑州市450045
陈祥龙 刘恩昌 姚文博 华北水利水电大学机械学院 河南省郑州市 450045
1 机器人系统概述
全自动物料搬运机器人在设计时运用了模块化思想,符合当前自动化与模块化发展趋势,与现阶段车间物料搬运作业有较高的耦合性和可开发性,能够适应不同物料搬运作业条件与搬运任务。
搬运机器人可自主循迹至任务区读取任务二维码,自主进行任务要求处理和路径规划,然后自动运行至物料提取区按搬运要求进行物料抓取,再移动至物料摆放区进行物料的放置,整个过程无需人工操作与遥控,减少了人工搬运的效率低下、人工成本高以及安全隐患问题,在物料识别方面运用了颜色传感器来识别物料种类以及物料的位置,以此更好地进行搬运任务的实现。该全自动物料搬运机器人系统具有效率高,适用范围广,无需人工辅助,安全稳定等优点。
2 系统机械结构设计
2.1 设计方法
设计时利用机械绘图软件对搬运机器人进行建模和运动仿真,利用有限元分析软件对整体进行了有限元受力分析。在结构方面,利用激光切割机切割亚克力板以此制作车架及机械臂下部旋转模块,利用3D打印机来打印所设计的爪子三维模型作为搬运机器人的抓取手爪。经过多轮分析,该设计结构满足刚度与强度要求。
2.2 机械结构简述

图一 物料搬运机器人组装实物
结构设计特色说明:
机械臂:小车机械臂采用五个舵机联动控制,拥有五个自由度,大大降低了机械臂抓取和放置的运动时间,同时提高机械臂的稳定性。
机械手抓:机器人机械手抓部分采取上下两层设计,提高物料抓取能力和稳定性,同时柔性缓冲结构可以使物料抓取更加稳定而且一定程度上减少了舵机因骤停导致的机械损伤,起到保护舵机的作用。
定位系统:电机编码器给定搬运车行驶距离,有助于搬运车实现精准定位。
3 pcb板图设计与电路搭建
PCB板将mega2560主控芯片和L298N电机驱动集合,做成集成电路。并将其他物料搬运所需传感器引脚简化整合,如图二所示。
该PCB板中颜色传感器、二维码识别模块、四个灰度模拟传感器、两个数字红外传感器这些传感器的GND、VCC、信号引脚被设计于图示下方处。构成机械臂的五个舵机的引脚被放置于图示PCB板上方位置处。四个电机驱动模块和电机引脚放置于PCB板四角位置。另外,该集成电路板附带WIFI通讯模块(位于图示芯片左侧),并分别带有5V(传感器供电)、7V(驱动舵机)、12V(L298N模块供电)电源供电引脚及其地线引脚。极大地节省了器件使用数量、简化的电路连接方式,并最大程度的减轻机器人重量,使机器人的整个稳定性能得到了大幅度提高。
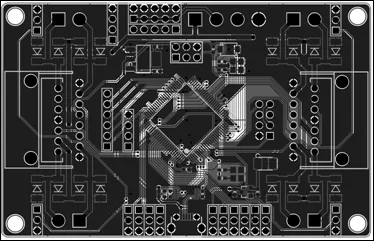
图二pcb板图
机器人电路系统由电源模块、稳压模块、移动模块、循迹模块、任务识别处理模块、抓取模块以及主控板七部分组成。其中电源模块采用12v2200毫安直流电源,稳压模块采用LM2596恒流恒压电源模块给用电器提供稳定的7v驱动电压,能够有效保持机器人搬运时的稳定性和准确性。移动模块采用GM37—520直流减速电机和麦克纳姆轮,可以保证搬运平台全向移动,具有极强的灵活性和高效性。循迹模块采用模拟灰度传感器,可以进行差分方法,更能适应更广范围的工作光线状况,而不是像如红外传感器那样只能输出数字值,减少了寻迹过程中发生脱离轨迹的概率。任务识别处理模块采用GM65扫描设备模块,其优点是功耗低,工作电流小于150mA,一体化设计,体积小准确性高;颜色识别模块采用GY—31 TCS230颜色识别传感器,可以读出物料的RGB值,进行RGB-HSV转换进行色域分析,从而可以读出不同物料的颜色参数。抓取模块采用自行设计的机械手爪与DS3230舵机配合,实现物料的抓取与摆放。
4 物料搬运系统控制算法设计与优化
内部程序主要有三大模块构成:第一个是运动模块:运动模块由小车运动和机械臂运动函数共同构成,内部程序中Move函数内嵌PID算法,控制机器人的稳定移动和循迹。Action函数内嵌舵机转动函数,控制机械臂的转动和抓取。第二个是信息模块:由颜色传感器和二维码传感器模块组成,二维码传感器从外部获取搬运任务,颜色函数识别物料颜色信息,再将其与二维码信息对比。第三个是传感器定位模块:四个模拟灰度传感器帮助小车稳定地实现前后方向的循迹。三个数字传感器作为触发中断函数控制小车精准停车。
在此程序设计的过程中搬运车在全程的稳定运行取决于很多因素的协调配合,其中对搬运车运动稳定有重要作用的是PID算法和编码器定位,其中PID保证了搬运车在物料输送与前往任务区读取任务过程中稳定移动,较高速运动时,使车身摇摆幅度降到最低。编码器帮助搬运车实现精准定位。
4 总结
本文以提高车间物料搬运高效性与安全性为出发点,设计开发了一种能够实现二维码物料搬运任务识别,物料识别,自主路径规划,自动循迹,LED显示搬运任务,物料抓取与摆放,任务完成反馈等功能的全自动物料搬运机器人。经组装调试测验,该机器人系统功能稳定完善,操作简单,搬运效率高,投入成本低,响应迅速,实现了自动化智能物料搬运的同时避免了由于人工搬运物料所产生的安全问题。
