人脸识别中特征提取和匹配算法研究
2019-05-10李天向丁潇潇西安电子科技大学
李天向 丁潇潇 西安电子科技大学
引言
随着人脸识别技术的出现以及应用,不仅提高了工作效率和质量,而且节约了更多的资源成本,深受很多用户的信赖。然而在人脸识别技术的发展和应用中,还需要攻克特征提取和匹配算法的两大难题,消除各种影响因素,促使人脸识别技术更加高效准确。
一、人脸识别的基本内容
影响人脸识别系统的因素分为个人用户需求和匹配算法,因此要构成一个比较完整、准确的人脸识别系统,就必须高度重视图像预处理、人脸检测、面部特征提取、分类识别这四个环节,要将每一个子系统的价值与优势都充分发挥出来,才能促进人脸识别研究的高速发展,进而为社会做出更大的贡献,实现双赢的局面。
图像预处理是指人脸图像的采集以及简单处理,要确保图像具有高效率和质量的识别力度。由于每一个人的脸部特征都有所差异,因此在图像采集时就会受到各种因素的影响,进而导致图像分辨率低下。
人脸检测是指判断图像中是否存在人脸,并且判断其所在的位置。人脸检测算法还可以进一步判断出人脸在图像中所占的比例,推测出人脸五官的具体位置。
面部特征提取属于人脸识别过程中的重要环节,特征提取的质量好坏将直接影响到人脸识别的质量好坏。特征提取的主要目的是为了寻找出人脸图像上像素点之间的差异,利用像素点之间的差异性来建立特征向量,为以后的识别奠定基础。
分类识别是指在特征提取完之后,通过特征提取到的算法进行特征的组合,进而寻找合适的分类器进行人脸识别。
二、人脸识别中的特征提取方法
(一)经验规则方法
经验规则方式是指研究人员在拿到人脸图像时,先根据自身的经验进行基本信息的提取和理解,进而根据自身的理解程度制定合适的分类规则。人脸识别主要是根据人面部的五官特征,如眼睛、鼻子、耳朵、嘴。每一个人的五官在面部上的分布规律都会有所不同,因此根据分布规律即可制定合适的特征标准。例如:每一个人的正脸图像,眼睛呈对称形分布,眼睛下方、鼻翼两侧都会有一定比例的阴影存在,因此就会产生灰度差异。这时研究人员可以根据这些分类规则,提前制定出一套关于特征提取方法。
采用这种特征提取的方法,操作比较简单快捷,但是对于研究人员的自身经验与图像预处理能力有一定的要求,因此就会受到很多因素的限制。这种特征提取方法只能当做人脸识别中的初步特征提取,如要获得更加精准的特征,还需要进行不断的深入研究。
(二)色彩特征提取方法
人脸图像上的色彩分为三种主要基色分别为灰、黑、白,因此在特征提取时,也可以根据图像中的色彩分布来提取人脸特征。这种特征提取方法需要对人脸图像上的色彩信息有一个全面的了解,进而通过整理、归纳,建立基本模型,通过色彩比例与模型进行对比,进而提取特征。例如在人脸图像中,眼睛下方、鼻翼两侧颜色为灰,眼睛会有一定的黑白比例,肤色也有所不同。
(三)几何形状方法
几何形状方法主要是借助模型的构建,将人脸图像中所包含的几何形状与模型进行对比分析,进而进行特征的整理归纳,进而找到相似目标。几何形状方法充分利用了图像色彩特征信息的波峰波谷、边缘特征和灰度分布,只要找出这些信息的相关联系,就可以构建合理的模型图。这种方法能够快速检测出人脸图像中色彩信息和全局边缘特征,在目标寻找中更加精确化。
(四)统计方法
统计方法的本质就是利用模式识别的思想,将人脸图像当中所包含的所有信息,都当做有效信息,通过相应的整理与归纳,将这些信息划分为特征信息与非特征信息,进而提取有效信息。常见的算法有结合PCA的特征提取、结合人工神经网络的特征提取、结合支持向量机的特征提取等。
三、尺度不变特征变换算法的特征提取
尺度不变特征变换算法也分为四个环节,分别为构建尺度空间、检测搜索极值点、寻找最佳极值点、生成特征向量。
在应用尺度不变特征变换算法的特征提取时,需要对人脸图像的尺度空间相关内容有一个全面的了解,接下来根据尺度空间来寻找出关键点。在极值点的寻找过程中,需要根据尺度空间图像的坐标(f(x,y))与高斯参数(z)来建立以下搜索公式:

在上述公式中,字母a代表图像中相邻两个尺度之间的比例关系,是常数值。
在关键点找到之后,接下来就需要确定关键点所发展的方向。确定方向时需要通过像素点的构建,然后根据特征向量,这样才能在尺度不变特征变化的算法下提取特征。根据关键点以及发展方向,用字母a来表示相邻两个空间尺度之间的比例关系,然后用关键点作为圆心,用1.5a和3倍的1.5a作为半径,进行圆的勾勒,其计算公式就如下所示:

在发展方向确定之后,然后采用统计方法,进行关键点的提取,并且进行规律统计。其分布示意图如下:
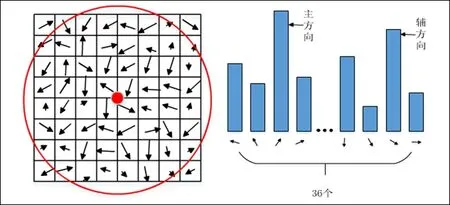
最后一步就是特征的生成。先要将坐标轴按照特征点的分布方向进行依次旋转,每一个方块内的箭头朝向,就是该区域的梯度方向,当特征点接近梯度向量时,表面关键点的信息就越多,特征提取的精准度就越高。
四、SURF算法的特征提取
SURF与尺度不变特征变换的提取流程有着很大的差异,然而这种算法的提取速度非常快。SURF算法选用了海塞矩阵行列式特征值的近似值来生成尺度空间,其公式如下:
将计算得到的特征值,根据特征值的正负判断,进而整合划分为关键点,根据关键点来进行像素点的对比。
接下来就需要进行特征点的候选,特征点的候选也就是上述算法当中的极值点确定,将同一尺度空间内的像素点值进行对比分析,进而筛选出最大值与最小值中的关键点,进而作为候选特征点。
最后一个环节就是特征点的发展方向计算,需要根据关键点所在圆形区域的haar小波进行特征分析,然后采用加权法计算出综合,再将haar小波的长度拉伸为4s,在每一个圆弧区域内分别计算出各自相对应的方向。然后再将提取的扇形按照一定区间进行旋转,选出该区域内所有方向一致的关键点所指方向。其过程如下图所示:
五、结语
综上所述,人脸识别技术涉及到了很多学科领域,更是计算机领域最为热门的研究技术之一。人脸识别技术相比于传统的生物特征识别技术,不仅具有着识别精准、速度迅速、操作简单快捷的优点,而且耗费的成本费用较少,深受很多用户的青睐。因此在今后的发展中,就可以大力推广和应用人脸识别技术,进而提高精准度。
