航天器舱外载荷适配器技术综述
2019-05-10康永周晖马少君高波谭立
康永 周晖 马少君 高波 谭立
(兰州空间技术物理研究所,兰州 730000)
航天器舱外载荷适配器(以下简称为载荷适配器)是一种质量和体积较小、功能较简单、复杂度较低的轻小型空间对接机构[1],支持舱外载荷在轨安装、拆卸,为舱外载荷提供通用化的机械、电能、信息、热控、流体等部分或全部接口。其用途可归纳为:①用于舱外暴露实验,如在“国际空间站”(ISS)的大量材料暴露、空间环境监测、空间生命科学、空间天文和空间地球科学等领域的试验研究中应用[2-5]。②用于在轨航天器或平台部件替换维修,如在更换ISS日本暴露设施中的电源配电箱、生存电源配电箱、视频信号转换开关、流体泵组合件等时应用[6],以及在美国“轨道快车”(OE)项目在轨可更换单元(ORU)的在轨更换中应用[7]。
我国在“十一五”期间开始了空间站舱外载荷适配器的研发工作,目前已进入工程研制和应用阶段。例如,在神舟七号任务中开展的固体润滑材料外太空暴露试验[8]中应用。随着我国空间技术的发展,特别是未来空间站建成运行,对载荷适配器的需求将急速增长。
本文介绍了国内外几种载荷适配器,针对空间机械臂操作、人机工效学存在的问题,分析了载荷适配器的关键技术和解决途径,提出了我国载荷适配器技术发展建议。
1 国内外载荷适配器
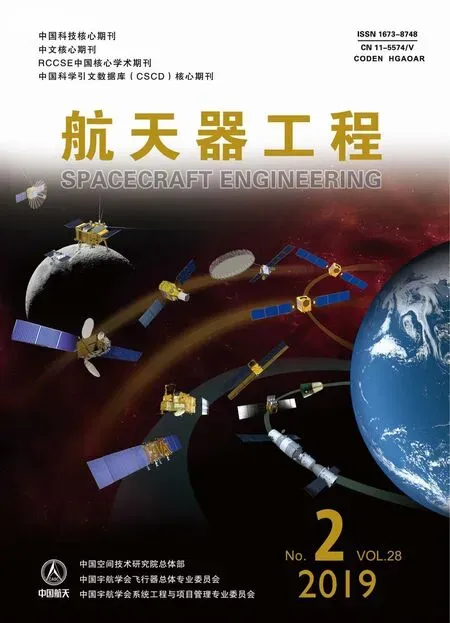
根据操作方式不同,载荷适配器可分为被动式和主动式两类(见图1)。被动式载荷适配器由机械臂或航天员操作进行舱外载荷的对接,然后由载荷适配器实现锁紧和接口连通。主动式载荷适配器由机械臂或航天员将载荷搬运至载荷适配器的捕获范围内,然后由载荷适配器主动实现对接、锁紧和接口连通。
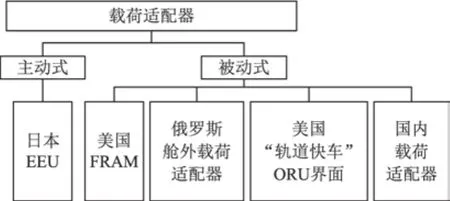
图1 载荷适配器分类示意Fig.1 Classification of payload adapters
1.1 国外载荷适配器
1.1.1 日本EEU
日本实验舱暴露设施(JEM-EF)与暴露载荷连接的载荷适配器称为EEU[9],见图2。EEU上能够安装或更换质量不大于500 kg的暴露载荷。它由暴露设施连接单元(EFU)和载荷接口单元(PIU)组成。EFU包括捕获锁(3个)、导向锥(6个)、电源流体连接器,以及内部的1套同时驱动3个固定锁臂的连接机械。PIU包含V形导向槽(3个)、中央阻尼器(1个)、定位销(6个),以及与EFU对应的电源流体连接器。EFU能够抓取被机械臂送到预定位置的PIU,并且克服和吸收机械臂负载造成的定位误差,连接或脱离PIU。EFU和PIU的接口都装有电源流体连接器,为载荷提供电能、通信、热控和流体[10-11]。

图2 EEU接口示意Fig.2 Interfaces of EEU
EEU的功能实现方式如下。
(1)引导定位。在起始阶段通过EFU上的3个捕获锁捕获与之对应的PIU上的3个V形导向槽,主动消除安装于载荷端的PIU与安装于平台端的EFU之间的初始位置姿态误差。然后,基于销孔配合原理,利用定位销和孔的配合实现精确定位。
(2)机械锁紧和电连接。通过平台端电力驱动的捕获锁实现机械锁紧、电源流体连接器连接。
EEU的工作过程为:①由机械臂将载荷移动到待安装的EFU位置[12];②由EFU上面的3个捕获锁捕获PIU,由导向锥和定位销的配合精确定位,最终依靠捕获锁和V形导向槽抓获并对准PIU时产生的强力[13-15],连接所有电源流体连接器。
1.1.2 美国FRAM
美国FRAM[16-20]广泛应用于美国和欧洲载荷暴露平台上,属于纯机械式的载荷适配器。FRAM由机械臂或航天员操作对接并提供动力,实现载荷的供电、通信、机械连接。FRAM通过螺栓连接到暴露平台上,其结构组成与安装示意如图3所示,主动端组成如图4所示。
FRAM功能实现方式如下。
(1)引导定位。通过机械臂或航天员操作,利用圆锥销和圆锥孔的引导消除安装于载荷端的接口部分与安装于平台端的接口部分之间的初始位置姿态误差,再进一步利用圆柱销和孔的配合实现定位。
(2)机械锁紧和电连接。基于丝杠副传动原理,将外接工具或机械臂提供的旋转动力经放大转化为轴向力,推动锁紧销、盲插连接器插头沿轴向运动与马蹄扣、盲插连接器插座配合,实现载荷与平台的机械锁紧及电连接。
FRAM的工作过程为:①机械臂或航天员调整载荷端FRAM主动端与被动端之间的相对位置姿态,直到所有定位销孔配合成功;②由外部机械设备驱动FRAM主动端齿轮箱带动螺杆转动,螺杆推动驱动架a、驱动架b向两侧运动,直到4个插销完全插入到位,完成盲插连接器的连接并锁紧FRAM被动端的马蹄扣。
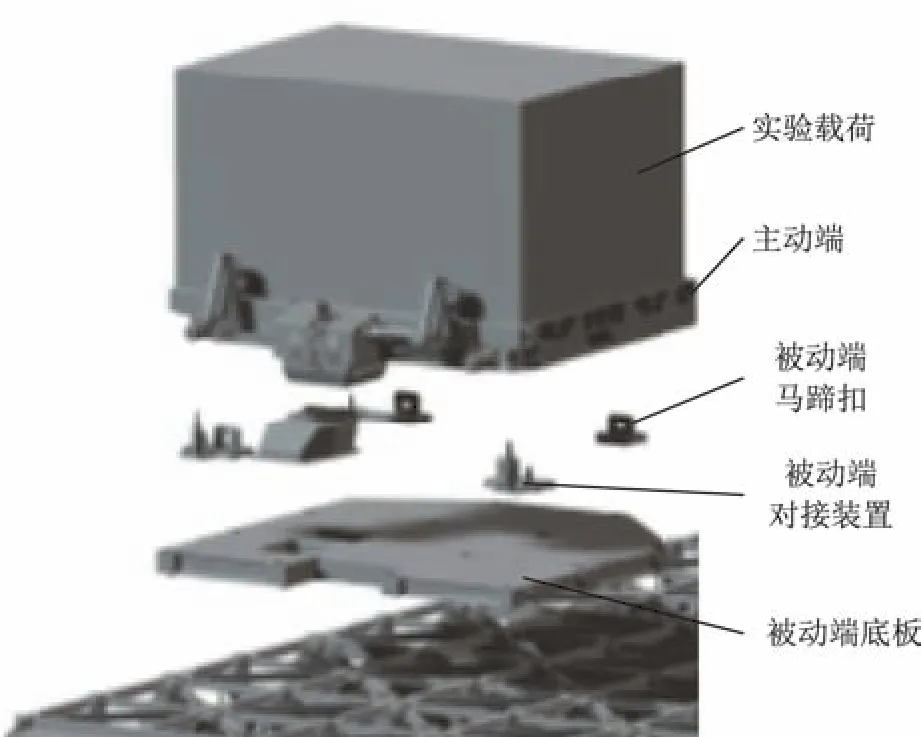
图3 FRAM结构组成与安装示意Fig.3 Composition and installation of FRAM
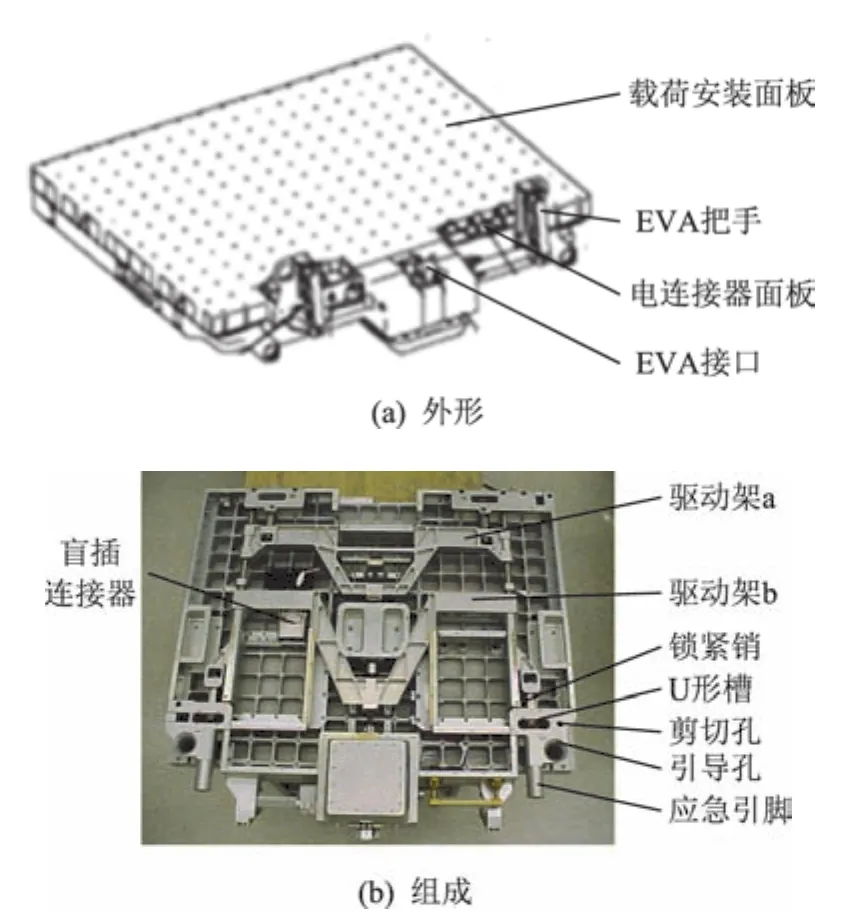
图4 FRAM主动端外形及组成Fig.4 Figure and composition of FRAM active side
1.1.3 俄罗斯舱外载荷适配器
可重构通用工作站(URM-D,见图5)是ISS中俄罗斯舱段暴露设施[21-23]的暴露模块结构,其中包括舱外载荷适配器,为载荷提供电力、数据、机械连接。适配器由主动端和被动端组成。主动端安装在URM-D上,由机体、方形适配孔、锁紧装置、丝杠、手柄、驱动架、防松装置等组成。被动端安装在载荷端,由载荷安装孔、定位与锁紧配合装置、载荷安装面组成。
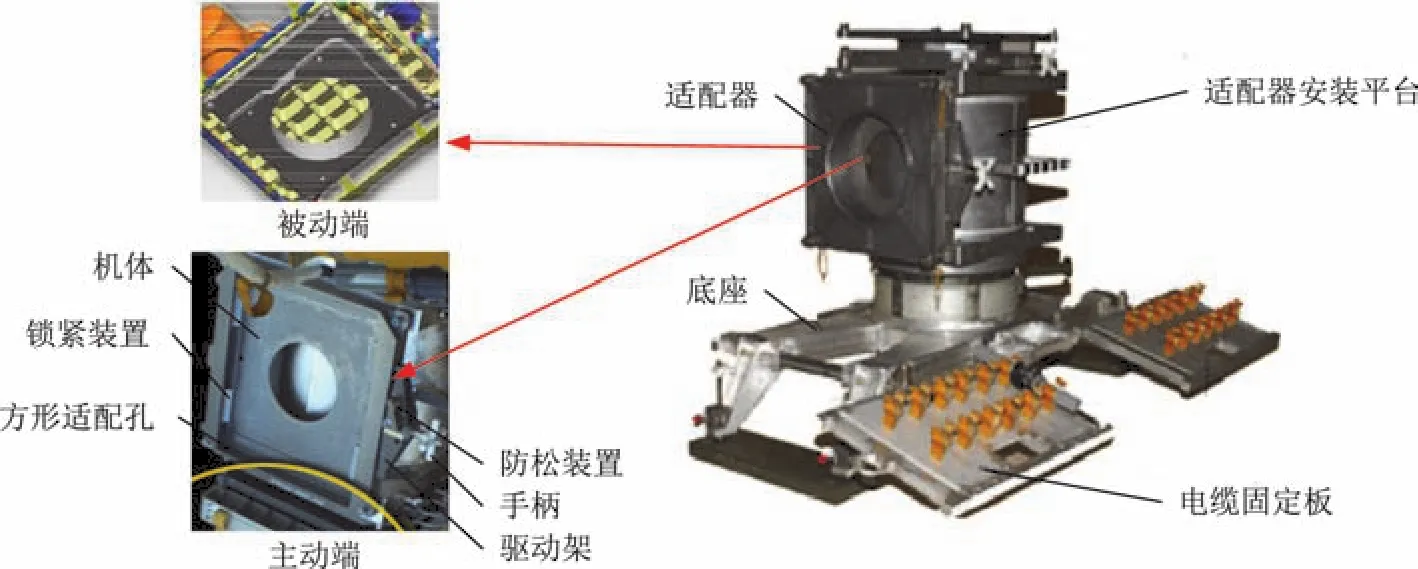
图5 URM-D及其适配器组成Fig.5 Configuration of URM-D and its adapter
俄罗斯舱外载荷适配器功能实现方式如下。
(1)引导定位。通过航天员操作,基于销孔配合原理,利用方形适配孔与方形销的配合引导消除安装于载荷端的被动端与安装于平台端的主动端之间的初始位置姿态误差。
(2)机械锁紧和电连接。基于螺纹丝杠副传动原理,将航天员手臂提供的旋转动力经放大转化为轴向力,推动锁紧装置配合,实现载荷与平台的机械锁紧。电连接完全由航天员操作外置的电连接器实现。
俄罗斯舱外载荷适配器工作过程为:①航天员搬动载荷,随着主动端方形适配孔的引导使主动端配合面与被动端配合面贴合;②航天员拧动适配器主动端的手柄锁紧载荷。如需进行载荷的电连接,则需航天员再次手动操作电连接器。
1.1.4 美国“轨道快车”ORU界面
2007年,美国“轨道快车”[7,24]项目成功完成在轨飞行试验,具备在轨捕获、模块更换和在轨加注等多项功能。ORU界面支持服务卫星ASTRO通过机械臂安装更换目标卫星NEXTSat上的载荷,以延长目标卫星的寿命,提高在轨卫星的生存能力。ORU界面由主动端和被动端组成,见图6。
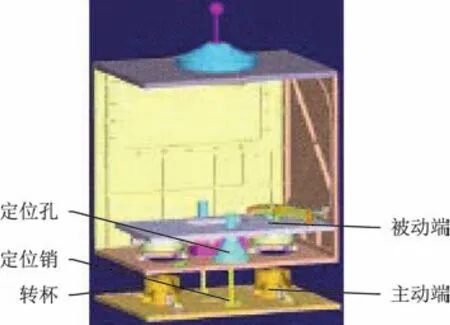
图6 ORU界面组成Fig.6 ORU interface composition
ORU界面功能实现方式如下。
(1)引导定位。在机械臂操作对接的过程中,基于销孔配合原理,利用锥形孔与圆柱销的配合引导消除初始位置姿态误差。
(2)机械锁紧和电连接。通过平台端电力驱动的转杯实现主动端和被动端的机械锁紧和电连接。
ORU界面工作过程为:①服务星ASTRO上的机械臂调整ORU界面被动端与目标星NEXTSat上的ORU界面主动端的相对位置姿态,直到所有定位销孔配合成功;②由主动端驱动2个转杯实现主动端和被动端的机械锁紧和电连接。
1.2 国内载荷适配器
我国在“十一五”期间开始了空间站载荷适配器[25-27]的研发工作,目前已完成引导定位装置、捕获锁紧锁等关键部件和润滑技术、适配于机械臂的捕获锁紧技术的攻关,掌握了载荷适配器总体设计技术和对接动力学仿真方法,开展试验样机研制、动力学仿真等,验证了与我国空间站实验舱机械臂操作能力的匹配性。
我国载荷适配器设计借鉴ISS中美国FRAM基本形式和原理,由主动端和被动端组成,采用被动式(见图7)。综合考虑我国空间站机械臂、航天员舱外维修能力,采用电动为主、手动为辅的双动力驱动锁紧工作模式,通过先引导定位、同步捕获,再机械锁紧和供电、通信等连接的顺序实现接口功能。主动端安装在暴露载荷上,由捕获锁紧锁、丝杠、螺母A、螺母B、定位销等组成。被动端安装在航天器端,由电路浮动连接器、液路浮动断接器、定位孔等组成。
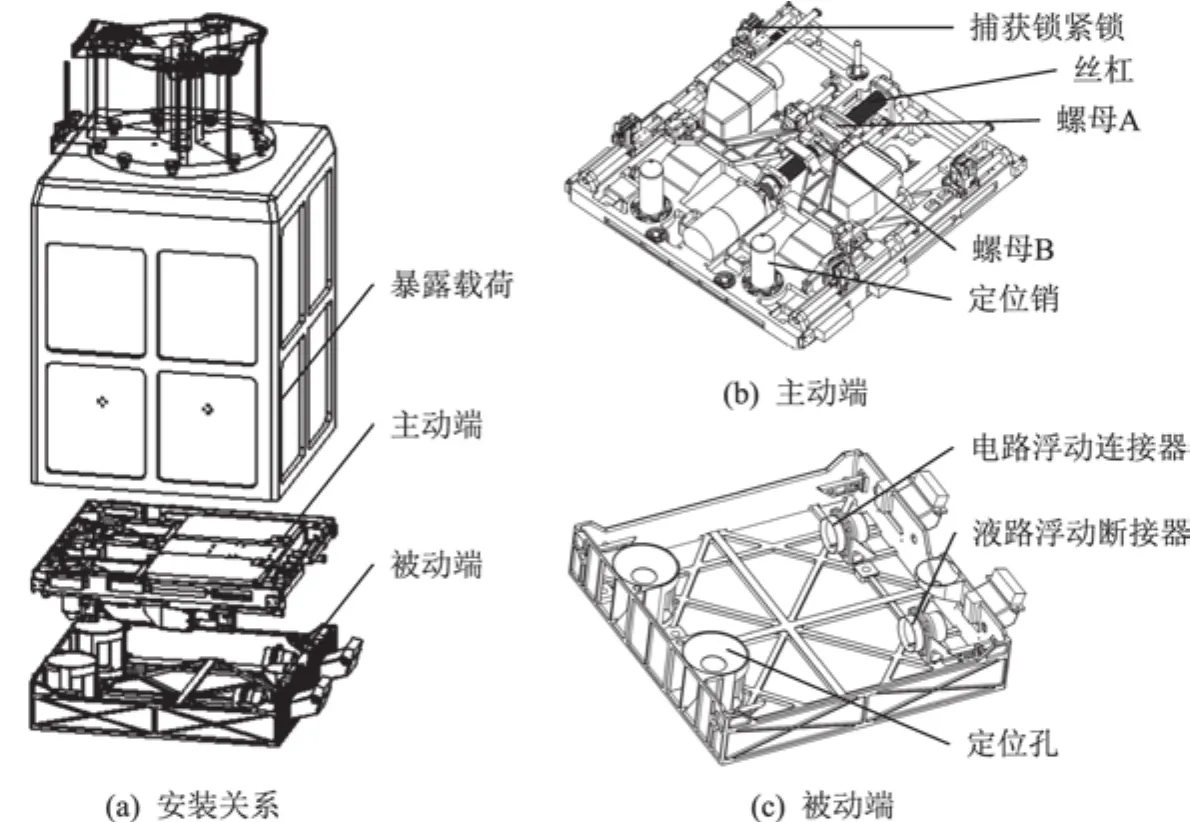
图7 国内载荷适配器Fig.7 Payload adapter of China
国内载荷适配器功能实现方式如下。
(1)引导定位。载荷适配器要克服机械臂或航天员操作偏差,引导并校正载荷位置姿态,为下一步捕获锁紧连接建立前提条件。它通过主动端定位销与被动端定位孔配合实现引导定位(见图8)。当主动端定位销通过被动端定位孔锥形开口引导落入定位孔后,依靠主动端定位销圆柱段与被动端定位孔圆柱段的校正作用实现对位置姿态误差的校正,使主动端和被动端达到捕获要求,主动端捕获被动端。

图8 定位销和定位孔Fig.8 Positioning pin and hole
(2)机械锁紧和电连接。捕获操作建立载荷适配器与机械臂或航天员之间的交互界面,并为下一步锁紧连接建立前提条件。捕获在机械臂或航天员操作对接的后半段进行,并向机械臂或航天员明确交会捕获状态,随后机械臂或航天员依据交会信息进行下一步操作。为保证捕获的可靠性和施力的均匀性,在对接面的4个角布置了捕获锁紧锁。机械臂切换到随动模式或航天员松开载荷后,载荷适配器的内部锁紧连接机构动作首先精确校正载荷相对暴露平台的位置姿态偏差,随后进行电路浮动连接器、液路浮动断接器的插合和机械锁紧操作。4套捕获锁紧锁共用1套驱动机构驱动,保证运动的同步性。同步驱动原理如图9所示。

图9 同步驱动原理Fig.9 Principle of synchronous driving
国内载荷适配器工作过程为:①载荷适配器主动端运行至捕获状态;②通过机械臂或航天员调整载荷端的载荷适配器主动端与被动端对接,并被捕获;③由载荷适配器主动端电控锁紧或由外接工具驱动锁紧,完成电连接器的连接和机械锁紧。
1.3 综合分析
国内外载荷适配器主要技术特点总结见表1。对比分析可知:载荷适配器的设计和工作过程以机械臂和EVA的操作特性为基础,核心为引导定位,其次为适配于引导定位的机械锁紧与电连接。引导定位大多依据销孔配合原理,对机械臂操作能力要求较高,但是降低了载荷适配器本身的复杂度。少数以锁臂与V形导向槽配合实现引导定位功能,虽然功能强大,但是复杂度高。

表1 载荷适配器特点Table 1 Characteristics of payload adapters
2 关键技术分析
载荷适配器除涉及动力学、机构、控制等多个学科外,还特别涉及空间机械臂操作、人机工效学等学科,同时要适应复杂空间环境(低轨、高轨、深空等),满足高可靠等工程要求。其中,最为关键的是适配于机械臂和EVA的操作特性,为此需要解决多个技术难题。
2.1 空间机械臂操作、人机工效学存在问题
空间机械臂技术、航天员EVA技术降低了载荷适配器的研制难度,但同时带来了一系列新问题。ISS的绝大部分暴露载荷与平台之间以通用的载荷适配器集中安装于暴露平台上,通过空间机械臂及航天员EVA进行暴露载荷的安装与回收,出现故障后由航天员EVA进行维修操作。通过机械臂或机械臂配合EVA进行暴露载荷的安装和更换,极大地提高了暴露资源的利用效率和灵活性,但存在以下问题需要解决。①无法精确定位。机械臂的操作精度有限(见表2),同时航天员EVA时人工直接操纵带来误差,造成载荷无法直接精确定位。②驱动力不足。机械臂的功率限制及机械臂长臂结构的影响,造成机械臂输出力有限,同时在EVA时处于失重状态的航天员操作力有限,导致无法直接完成载荷的锁紧连接/拆卸。

表2 ISS上机械臂主要参数Table 2 Main parameters of ISS arms
2.2 关键技术
机械臂、航天员操作无法精确定位、驱动力不足,同时对接过程碰撞、机构运动复合,因此设计中要依据机械臂、航天员操作特性进一步明确载荷适配器的工作模式,确定关键部件及协同关系,同时融入人机工效学设计,攻克地面试验关键技术,以保证机械臂或航天员操作动力学和机构动力学的匹配。
(1)工作模式。机械臂、航天员操作下,载荷适配器首先要通过引导定位初步校正操作误差,并在引导定位的过程中进行同步捕获(为机械臂与载荷适配器提供明确的任务界面),随后主动精确校正操作误差,最后进行电路浮动连接器、液路浮动断接器的连接和机械锁紧。
(2)关键部件及协同关系。按照工作模式,载荷适配器利用大量部件实现其功能,如引导定位装置在机械臂或航天员操作载荷对接时全过程进行导向定位,捕获锁紧锁在对接过程同步进行捕获,电路浮动连接器、液路浮动断接器在载荷适配器锁紧过程进行连接,捕获锁紧锁在载荷适配器工作过程最后阶段进行机械锁紧,其工作过程存在交叉和重叠,性能要求较高。机械臂操作模式下,对接过程中进行同步捕获将为机械臂与载荷适配器提供明确的任务界面,捕获锁紧锁设计首先避免影响引导定位装置的对接,同时在较大范围内可靠捕获及准确检测捕获状态,为机械臂预留一定的活动空间。
(3)人机工效学。失重状态的航天员在舱外操作载荷对接时身穿笨重的舱外航天服,难以施力和判断,造成操作困难,进而对操作对象的人机功效学要求高。在载荷适配器设计阶段要针对航天员舱外操作进行专项设计,对产品进行充分的人机功效学评价。在航天器整体设计时,应用系统要合理布局、统一规划,为载荷适配器预留充足的操作空间,使正常操作与应急操作成为可能。
(4)地面试验。机械臂操作舱外载荷对接时,需要执行复杂而精细的操作。载荷适配器由大量活动部件同步协调工作,以保证载荷能够可靠对接、锁紧,电气、液路连通。由于航天产品的地面试验子样少、可靠性安全性要求高、真实在轨环境难以模拟、系统联试试验有限且节点与产品研制过程难以匹配等特殊要求和约束,需通过合理规划、模拟在轨工作状态,利用有限的真实机械臂和产品进行充分的系统试验、单机试验等,充分验证载荷适配器在各种环境、使用工况中的性能和功能。
3 启示与建议
随着以机械臂技术为代表的智能机构技术的应用,基于机械臂技术和航天员EVA的载荷适配器技术取得了长足发展,多种形式的载荷适配器在ISS上进行了大量应用,尤以被动式的载荷适配器占多数。随着在轨服务任务需求的发展,载荷适配器将会在未来在轨服务技术发展中占据重要地位。随着我国航天技术的发展,载荷适配器技术发展路线应基于国内需求、技术基础及未来在轨服务等发展趋势制定,建议从以下几个方面考虑。
(1)结合国内潜在需求,针对未来先进载荷任务需求,开展类似于日本EEU的功能强大、承载能力强的主动式载荷适配器系统研究。主动式载荷适配器系统在起始阶段通过爪类机构捕获对应导向结构主动消除初始位置姿态误差,适应机械臂操作尺寸质量较大的载荷;然后利用销孔类配合实现精确定位;最后由专用机构单独进行供电、通信、液路等资源的连接,实现强大的资源连通能力。针对大量常规的载荷任务需求,开展通用化、标准化被动式载荷适配器的研制,采用电动和机械臂操作为主的工作模式,降低对航天员EVA资源的占用。针对小型、少量、非常规、无源且长期暴露实验载荷任务需求,开展利用航天器舱外把手、桁架等结构资源的纯手动操作式载荷适配器的研制,充分利用航天器的暴露资源。
(2)针对大型高轨航天器等在轨模块更换、模块补充升级、功能重构、载荷更替、载荷增加等需求,开展高可靠、可重复、自适应、可大量布置的被动式载荷适配器技术研究。通过锥形定位孔和销的配合引导定位、同步捕获,建立与操作者的对接交互界面;按照机械锁紧和资源连接的顺序实现接口功能,采用电动为主驱动锁紧工作模式,充分利用机械臂的操作能力使载荷适配器向小型、轻量化发展,支撑在轨服务的发展。