异步联网下发电机低励限制与PSS协调控制参数优化策略
2019-05-07孙博王德林康积涛潘志豪
孙博,王德林,康积涛,潘志豪
(西南交通大学电气工程学院,成都 610031)
0 前言
电网已经进入了大电网、超高压、远距离,和高压电缆普遍使用的时期,导致线路容性无功功率增多,发电机常常需要进相运行吸收电网过剩无功功率[1]。发电机低励限制(UEL)作为励磁系统重要的励磁限制部分,可以有效防止发电机进相运行时,励磁电流降低,功角增大,极易超出稳定运行范围的问题[2]。
当低励限制动作后,若低励限制参数整定不合理,会与电力系统稳定器(PSS)造成输出冲突,恶化PSS的作用效果,对系统造成持续振荡。国内外均出现过这种现象:低励参数设置不合理,导致不能与电力系统稳定器配合而发生有功功率、无功功率、端电压、电流等电气量不断振荡的故障[3-4];低励限制斜率过大导致了电压与功率在大范围内异常波动。一些发电厂机组也发生过相似问题[5]。
文献[6]分析了系统加入UEL后系统各电气量持续振荡的原因并分析了UEL与PSS在不同作用频段下配合效果。文献[7]通过分离UEL与PSS的作用频段分别设计UEL与PSS的参数使二者协调配合,但该参数整定方法不适用于UEL与PSS作用频段重合的情况。文献[8]研究分析了UEL重要参数及机组运行工况等因素对系统动态稳定性的影响机制。文献[9]研究分析了低励限制的应用目标和功能特点,并提出了工程实际中设置低励限制功能的一般原则。文献[10]分析了UEL增益以及不同进相深度对UEL动作后系统稳定性的影响。目前,对UEL的参数影响电力系统稳定性的机理研究较多,但并没有提出广泛适用的UEL与PSS协调控制的具体参数优化方法,因此发电机的低励限制与PSS协调配合参数优化尚属较新的课题,随着电力系统网架结构不断扩大,常需发电机进相运行吸收系统过剩无功功率,极易出现发电机进相过深UEL频繁动作与PSS输出冲突问题,因此对UEL与PSS协调控制参数优化问题的定性与定量研究有着理论与实际应用的重要意义。
由于不同厂家提供的低励限制参数不同,因此低励限制投入运行时,极易发生与PSS配合不当引发系统振荡问题,因此本文对UEL与PSS协调控制参数优化问题做了研究,提出运用基于粒子群算法对系统加入UEL与PSS的状态方程求解UEL的参数使二者协调配合。根据异步联网下云南电网某电厂的某次入网检测数据为例,对UEL参数做合理优化设计,当UEL动作后不影响PSS的作用效果,从而使UEL与PSS协调配合。最后在Matlab与PSASP软件下进行特征值分析与仿真分析,验证了所提策略的有效性。
1 系统模型
1.1 叠加型UEL模型
UEL接入电压调节器AVR有三种方式:如图1所示,一是在AVR后面,如UELA;二是在AVR前面,如UELB;另一种是输入电压调节器参考电压点上,如UELC。前两种方式当UEL动作后,都会把电压调节器通道切断,并连同PSS通道一起切断。由于本文研究UEL与PSS协调控制,因此本文采用叠加型UEL,当UEL动作时,仍保持电压调节器AVR通道与PSS通道作用[1]。低励限制框图如图1所示,UEL分为两个模块[11],第一个模块为UEL的限制曲线部分,保证发电机在安全范围运行,本文采用直线型UEL,由QVR=KuPt+CUt2的形式表示,其中Pt为有功功率,Ku和C分别为UEL限制曲线的斜率和截距。ΔS为第一个模块的输出量,第二个模块为UEL的控制环节,即一个超前一个滞后环节调节UEL的动态特性,其传递函数为:GUEL(s)=KH(1+sTH1)/(1+sTH2),其中KH为UEL的放大倍数,TH1与TH2为UEL的时间常数。采用直线型UEL,当测得电功率Pt及电压Ut时,可查表得出此时最大允许的无功功率值QVR,它相当于一个参考值,将该值与实测无功功率Qt作比较,如果它大于实测无功功率,将差值ΔS经过一个超前滞后环节送入调节器AVR中,本文采用的是叠加型UEL,可知在AVR前接入UEL,确保电压调节与PSS的作用仍保持,便于分析UEL与PSS协调控制,以ΔS,ΔUUEL作为状态方程的状态变量。

图1 UEL逻辑框图
1.2 PSS模型
本文采用以电磁功率偏差量ΔPe为输入信号的PSS1A模型,其传递函数框图如图2所示,传递函数如下:

其中,KP为PSS增益,Tr为一阶惯性环节时间常数,Tw为隔直环节时间常数,T1,T2,T3,T4为相位补偿环节时间常数,以ΔUs1,ΔUs2,ΔUs3,ΔUs作为状态方程的状态变量。

图2 PSS模型
1.3 Heffron-Phillips扩展模型及系统状态方程
为了研究UEL对PSS的影响,首先搭建含UEL与PSS的Heffron-Phillips扩展模型,如图3所示,图中:ΔUref为励磁参考电压偏差量,ΔEfd为励磁电压电压偏差量,ΔUUEL为UEL输出偏差量,ΔM为励磁调节器产生的电磁转矩偏差量,Δδ为发电机功角偏差量,ΔEq′为发电机暂态电动势偏差量,ω0为发电机同步转速,Td0′为直轴暂态开路时间常数,TJ为发电机转动惯量。AVR的传递函数为GAVR(s)=KA/(1+sTE),其中KA为励磁系统放大倍数,TE为励磁系统时间常数。

图3 Heffron-Phillips扩展模型
系统的参数K1~K8及状态方程见附录A所示,对于K1~K6在典型的Heffron-Phillips已有推导[1],K7,K8为系统加入UEL后的新增系数,与UEL的限制曲线斜率Ku和截距C有密切关系,对求取系统特征值,系统稳定性有着重要影响。
2 基于粒子群算法的参数协调优化
2.1 粒子群算法及优化流程
粒子群算法[12]的思想源于对鸟群捕食行为的研究。PSO算法的数学描述如下:在D维空间中,有N个粒子。第i个粒子的当前位置由向量Xi=(xi1,xi2,…xiD)表示,将Xi代入适应函数f(Xi)求适应值。第i个粒子的当前速度由向量Vi=(vi1,vi2,...viD)表示。第i个粒子经历过的最好位置由向量pbesti=(pi1,pi2,…piD)表示。种群所经历的最好位置由向量gbest=(g1,g1,…gD)表示。每个粒子的位置变化按公式(2)、(3)进行:


式中:vid(k)表示第k次迭代粒子i速度矢量的第d维分量;xid(k)表示第k次迭代粒子i位置矢量的第d维分量;w为惯性权重,调节对解空间的搜索范围;c1,c2为加速度常数,调节学习最大步长,取值一般在0~2之间。r1,r2为两个相互独立的随机函数,取值范围为0~1之间。
采用粒子群算法实现UEL与PSS协调控制参数优化问题,主要步骤如下:
1)编写特征值分析程序获得系统加入UEL与PSS后的状态矩阵,并初始化粒子群的速度和位置;
2)更新状态矩阵中的KH,TH1,TH2的值,求解状态矩阵的特征值及对应的阻尼比;
3)计算目标函数值,并将其作为当前适应度,更新pbest和gbest进而更新每个粒子的Xi和Vi;
4)判断是否满足终止条件,若满足则退出,否则跳至步骤(2)。
基于粒子群算法的UEL与PSS协调控制参数优化流程图如图4所示。

图4 基于粒子群算法的参数协调优化流程
2.2 优化目标函数
参数在优化过程中选取几种典型工况作为主要运行方式,增强优化结果的鲁棒性。因此本文在多种工况运行方式下兼顾机电振荡模式和非机电振荡模式的目标函数[13-14]为:

其中N为不同工况数目,np为机电振荡模式的个数,nq为非机电振荡模式的个数,ξ1和ξ2分别是机电振荡模式和非机电振荡模式阻尼比的门槛值,ξij为第i种运行工况下第j个振荡模式的阻尼比,α和β分别为对应的权重系数,γ为对负阻尼振荡模式的惩罚因子。本文机电振荡模式阻尼比的门槛值ξ1取0.1,非机电振荡模式阻尼比的门槛值ξ2取0.08,对应机电振荡模式的权重α取4,非机电振荡模式的权重β取1,惩罚因子γ取300。
考虑到UEL的各参数限制,UEL与PSS协调控制参数优化问题可描述为:

式中:KHmin,KHmax为UEL的放大倍数的最小值与最大值;TH1min,TH1max为UEL的超前时间常数最小值与最大值。TH2min,TH2max为UEL的滞后时间常数最小值与最大值。
3 算例分析
3.1 系统参数
以云南电网某电厂1号机组出现由于UEL与PSS配合不当导致发电机各电气量持续、明显波动发生动态失稳为例。如图5所示为水电厂A的主接线图,将出现故障的1号机组等效为单机无穷大系统。

图5 水电厂A的主接线图
当UEL参数整定不当时会恶化机组对系统的阻尼效果,发电机受到某一扰动后极易出现振荡,不能使UEL与PSS协调配合发挥各自的作用。
本文以上述现场事故为例,发电机采用三阶模型,发电机的额定有功功率PN=95 MW,额定无功QN=53 Mvar,系统基准容量为100 MVA;励磁参数为:KA=15,TE=0.01 s;PSS的模型为PSS1A,其参数为:KP=15,Tr=0.02 s,T1=4.79 s,T2=3.6 s,T3=1.4 s,T4=4.89 s,Tw=6s;系统参 数 为:Xd=0.976,Xd′=0.313,Xq=Xq′=0.633,TJ=8.312 s,Td0′=7.8 s,Xe=0.223,f0=50 Hz。
3.2 特征值分析
对于Ku与C的设定一般可按有功功率P=Pn时,允许无功功率Q=0及P=0时,Q=-(0.2-0.3)Qn两点确定低励单元动作曲线[15],本文设Ku=0.2,C=-0.27。该算例中可设增益KH的取值范围为[4,10],超前时间常数TH1的取值范围为[0.1,6],滞后时间常数TH2的取值范围为[1,50]。先利用粒子群算法对参数进行协调优化,得到在不同工况下的优化参数如表1所示。

表1 不同工况下协调优化后的参数
采用特征值分析法来验证使用粒子群算法的参数优化效果。编制特征值分析程序,获得在每一种工况下的特征值、频率和阻尼比。由表1可知对于每一种工况下通过粒子群算法优化可以得到精确的使UEL与PSS协调配合的UEL参数,但在实际工程中UEL参数要适应于不同工况的作用,因此为了保证UEL参数KH、TH1和TH2对每一种工况具有的良好鲁棒性,因此在运用特征值分析法时,此处取3种工况下每个优化参数的平均值,即


表2 参数协调优化后系统的机电振荡模式
如表2所示,得到在每一种工况下,励磁系统不加PSS,不加UEL;励磁系统加PSS,不加UEL;励磁系统既加PSS,又加UEL,3种情况下的特征值,频率,阻尼比。可以看出在励磁系统在不加入PSS与UEL时,系统机电振荡模式的特征值的实部为正,振荡频率为1.045 8的阻尼模式为负,属于失稳模态。在励磁系统只加入PSS后系统特征值实部由正变为负,振荡频率为1.007 5的阻尼模式为正,属于稳定模态,即PSS可以有效的抑制系统的低频振荡。比较励磁系统加PSS,不加UEL与励磁系统加PSS,加UEL的2种情况,系统的机电振荡模式与阻尼比并没有明显差距,系统属于稳定模态,即UEL的加入并没有影响PSS的作用效果。可见基于粒子群算法优化得到的UEL参数可以使UEL与PSS协调配合发挥各自的作用效果。
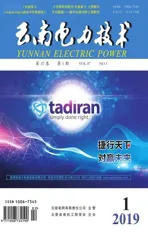
分析UEL的限制曲线的参数对加入PSS后的励磁系统稳定性的影响。为了使UEL超前滞后环节的参数KH,TH1,TH2对不同的Ku,C下每一种工况具有良好鲁棒性,表3取Ku在5种不同工况下每个优化参数的平均值=6.095 6。表4取C在5中不同工况下每个优化参数的平均值
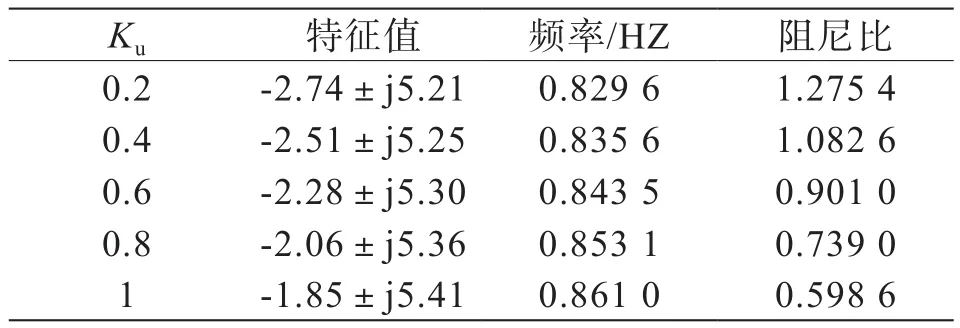
表3 不同UEL曲线斜率Ku下系统的机电振荡模式
由表3所示,当C=-0.27时,Ku在逐渐增大的过程中,机电振荡模态负实部的绝对值变小,阻尼比变小。所以当Ku的设置越大时,越不利于系统稳定,可能会导致发电机失步,引起系统解列。从理论分析来看,在某一有功功率,低励限制曲线与有功功率轴垂直时,因为没有确定的无功功率值必然会引起励磁系统在电压控制方式与电流控制方式间来回切换,造成振荡。而且当低励限制曲线的斜率设置过大,在同一有功功率处,较小的负无功功率都能引起低励限制动作,因此在有功功率上升期间,可能导致两种控制方式的互换,导致振荡。斜率应该取较低值,在实际应用中一般要低于0.3。
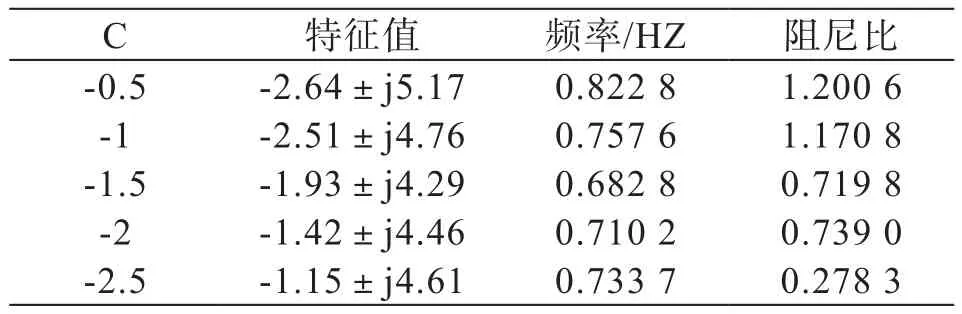
表4 不同UEL曲线截距C下系统的机电振荡模式
由表4所示,当Ku=0.2时,改变限制曲线的截距|C|,|C|在逐渐增大的过程中,机电振荡模态负实部的绝对值变小,阻尼比变小。因此表4表明低励限制曲线越低,留有的稳定裕度越小。
3.3 时域仿真分析
采用PSASP软件对3.1节中的算例系统进行时域仿真验证。以发电机的初始工况:P0=80 MW,Q0=-5 Mvar为例,在1 s时进行励磁参考电压-5%阶跃仿真保证励磁系统加入UEL后UEL动作,对比采用优化算法后励磁系统无PSS和UEL,仅有PSS,以及有PSS和UEL3种情况下有功功率,无功功率,机端电压,功角的变化波形图,仿真结果如图6所示。对比系统不加UEL,以及在不同Ku下系统有功功率,无功功率,机端电压,功角的变化波形图,仿真结果如图7所示。
由图6可见,当励磁系统中仅含PSS时,系统具有足够的阻尼抑制系统振荡,由系统有功功率可见,在扰动后经过1个周波,2.79 s系统达到稳定状态。当含PSS的励磁系统加入UEL后,由系统有功功率可见,在受到扰动后经过2个周波,5.62 s系统达到稳定状态,无功功率、机端电压及功角稳定时间大约为4.23 s,且加入UEL后的振幅与系统仅含PSS的第一个周波的振幅仅有微小差距。因此经过参数优化后的UEL在加入含有PSS的系统中几乎不影响PSS的作用效果,二者可以协调配合。由图7有功功率可见,Ku=0.2时,在受到扰动后经过2个周波,7.23 s系统达到稳定状态。Ku=1时,在受到扰动后经过8个周波,13.02 s系统达到稳定状态。无功功率、机端电压及功角稳定时间大约为4.84 s。由Ku=0.2到Ku=1,系统有功功率振荡周期明显变长,趋于稳定的时间变长,稳定性变差。可知UEL弱化系统阻尼的作用会随着限制曲线斜率Ku与截距|C|的增大越来越严重,因此对低励限制曲线的参数设计不应设置过大,确保系统有足够的阻尼,保证系统的稳定运行。

图6 UEL对PSS影响仿真图
图7 不同UEL曲线斜率Ku下的仿真图
4 结束语
对发电机低励限制与PSS的参数协调优化问题进行了研究,提出了基于粒子群算法的参数协调优化方法获得优化后的UEL的超前滞后环节参数,从特征值分析和时域仿真两个方面验证了上述方法的有效性,并且分析了UEL的限制曲线的斜率Ku和截距|C|对加入PSS后的系统稳定性影响,得到以下结论:
1)采用粒子群算法优化,以云南某电厂现场故障数据为例,整定出合理的UEL参数,当含PSS的励磁系统加入UEL后,并不影响系统的阻尼,使UEL与PSS协调配合,保证了系统的稳定性。
2)基于特征值分析与仿真验证了UEL弱化加入PSS后的系统阻尼的作用随着UEL的限制曲线斜率Ku与截距|C|的增大而明显增强,系统的稳定性越差。低励限曲线应在根据实际运行情况整定,既要保证进相满足调度下发的进相要求,也要保证系统有足够的阻尼确保系统稳定运行。