泵与风机PIV实验的示踪粒子撒播技术研究
2019-05-07张振刚凃程旭包福兵尹招琴吴逸洋
张振刚,凃程旭,包福兵,尹招琴,吴逸洋
(中国计量大学 计量测试工程学院,浙江 杭州 310018)
粒子图像测速技术(Particle image velocimetry,简称PIV技术)是30年前迅速发展起来的一种瞬态、非接触的整场测速方法[1]。近30多年来得到了不断完善与发展,PIV技术的特点是超越了单点测速技术(如热线测速)的局限性,能在瞬间(一般从数百纳秒到几百微秒)记录下测量区域的速度分布信息[2],因此PIV结果可测量各种工程结构与自然流场的空间结构以及场流动特性,故应用广泛,也是截至目前验证CFD(计算流体力学)结果的最佳实验方法[3]。如图1为PIV原理示意图所示[4]。PIV测量待测流场时,CCD相机将对激光照射示踪粒子后激发的荧光进行捕捉,这样相机可以获得每一个激光脉冲同步对应的CCD图像。一对粒子图像在已知时间步长的两个相邻时刻被捕捉,称为一粒子图像对。粒子图像对处理求取速度场时,待测的研究区域会被划分成整齐排列的一个个小区域,称为判问域。最后,通过自相关算法(或互相关算法)求得两幅粒子图像上对应判问域内的所有粒子在此时间步长发生的位移,判问域上所有粒子位移的平均值就表征这个判问域的速度矢量。算出每个判问域的速度,便重构出研究区域的瞬态速度场。

图1 PIV原理示意图Figure 1 Schematic diagram of Particle Image Velocimetry (PIV)
泵与风机是工业体系与生活基础设施中极其重要的两类流体机械,了解其内部流场对提高它们的工作性能、降低运行噪音、解决水泵汽蚀与风机喘振起关键作用[5,6]。PIV技术获得可靠的PIV实验结果,除了图像处理算法的影响外,最关键的就是获得清晰度与对比度高的粒子图像,而这都基于待测流场中撒播的粒子大小(考虑跟随性与散射强度)与浓度合适、粒子空间分布均匀。示踪粒子在流场中跟随性与分布的均匀程度会对测量结果产生很大的影响,Keane和Adrian(1990)指出每个判问域最小的示踪粒子数量不能少于15个,粒子撒播技术是PIV实验结果成功、可靠与否非常关键的一环[7]。对于泵与风机这类旋转流场,示踪粒子的撒播面临的挑战更大,一方面粒子撒播的导入管难于准确定位到旋涡中心,而且离心力的作用会使粒子浓度的降低;另一方面,这类流场的流速一般较大,往往面临着示踪粒子发生速率和撒播扩散速率偏低等问题。针对这一问题,陈莹[8]等人研究了风洞流场中不同种类方式散播示踪粒子,与Smith等人的工作类似[9],即在风洞实验段下游撒播示踪粒子并使粒子在风洞内循环,最终达到均匀分布。荣臻[10]等人通过高温高压气体作为示踪粒子的驱动力将示踪粒子加入风动管路,从而获得浓度合适分布均匀的粒子分布,发现部分粒子出现了聚团现象。汪志武[11]在研究低比速离心水泵的PIV实验中,事先将示踪粒子在水管内进行搅拌,使得粒子均匀撒布。但是对于大流量大体积的泵与风机,均匀撒播示踪粒子以及如何保证粒子浓度是首要难题。本文将主要针对PIV测试系统在大流量泵与风机中,研究示踪粒子的撒播技术。
1 实验装置与方法
1.1 PIV系统
本文泵与风机两个实验均采用德国Lavision公司生产的PIV系统,该系统由双脉冲Nd:CCD相机、YAG激光器、计算机系统及同步控制器组成。其中,激光器发出532 nm的绿光,其额定脉冲能量为125 mJ,激光重复率为15 Hz。CCD相机型号为Imager Prox,像素为2 M(1 600 pixel×1 200 pixel),具有12位灰阶,最小的曝光时间间隔低于120 ns,能够实现对高速瞬态流场的测量。PIV的硬件控制和所有的数据采集及图像后处理由德国Lavision提供的DaVis7.2软件操作完成。
1.2 双吸泵PIV实验
本文对双吸离心泵原型泵体进行局部机械改造,构造PIV实验区域的透明化,以满足CCD相机拍摄的要求。图2是双吸泵PIV实验模型的实物图,图3给出了激光片光源透射区域的局部剖面图。粒子图像的采集频率为10 Hz。

图2 双吸泵PIV实验装置Figure 2 PIV experimental set-up of double-suction pump
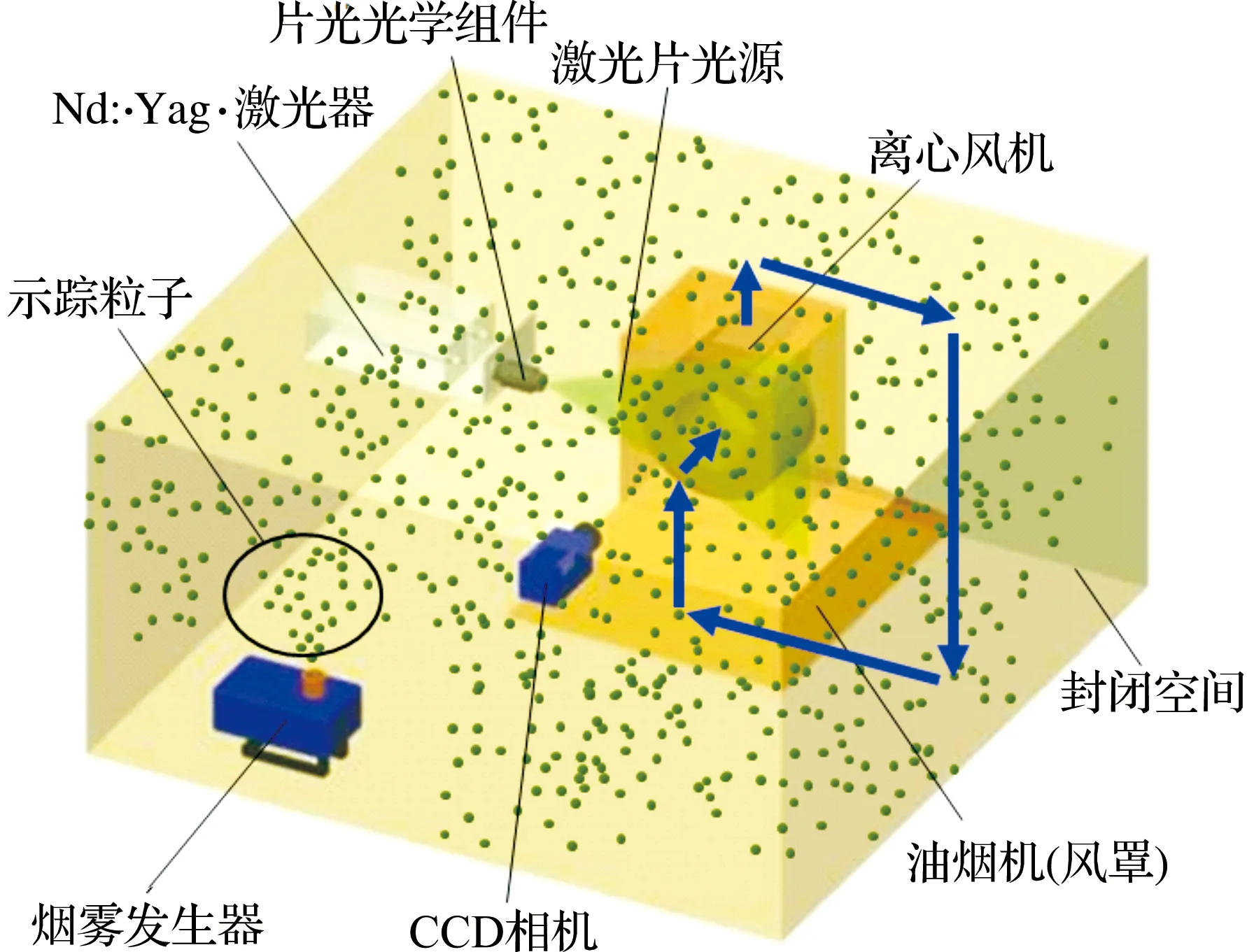
图3 油烟机PIV实验原理图Figure 3 Schematic diagram of PIV measurement of range hood
由于双吸泵模型的流量较大,采用非循环直排式的测量管路系统在示踪粒子的预混合和撒播上无法确保实验要求的粒子浓度和均匀性,同时直排式的管路系统也会浪费大量的示踪粒子,一般的单分散失踪粒子比较昂贵,当被测流体流量较大时经济性较差,大大增加了实验成本。测量液体时,一般都是在循环的回路当中,所以液体中的示踪粒子撒播可以在实验流动开始前,将其悬浮液预先投入被测流体,进行循环达到均匀分布[8]。双吸泵的PIV实验装置如图2,示踪粒子采用玻璃微珠,尺寸10~50 μm,约300 g的玻璃微珠与15 L的水进行预混合,搅拌均匀后,投入750 m3的水池中。此时,预混合的玻璃微珠和水的混合物并不能迅速地扩散,达到均匀的分布。为了使得玻璃微珠尽快扩散,启动双吸泵,让玻璃微珠随水循环流动一段时间。通过实际测量可知,这个循环的时间约为10 min。预混10 min后,玻璃微珠在粒子图像中的分布已较为均匀,浓度也适中,获得的粒子图像清晰度较高,而粒子图像对在研究区域内的相关性很高,符合互(自)相关算法的要求。
1.3 油烟机PIV实验
针对以往难测量、粒子不均匀等问题,本文提出一种示踪粒子撒播的方法:将油烟机安装在一个较大尺度的封闭空间内,在封闭空间内撒播示踪粒子并持续一段时间,使封闭空间整体示踪粒子浓度达到PIV实验要求。运行油烟机一段时间,使得油烟机内部的示踪粒子浓度与油烟机外封闭空间的示踪粒子浓度通过循环流动达到平衡,散布均匀,然后由激光片光源激发测量区域,CCD相机同步捕捉粒子图像。当油烟机开始运行后,在油烟机外的封闭空间与油烟机内部之间形成循环气流,由于封闭空间内充满了示踪粒子,因此,可近似认为进入油烟机的气体里包含均匀分布的示踪粒子。由于封闭空间内的粒子浓度掌握得当,加上封闭空间的体积要远大于油烟机内部体积,结果表明这些损失并不会对PIV粒子图像的质量造成影响。由此可大大延长PIV实验可持续时间,而不受流场速度和尺度的局限。
本实验采用的示踪粒子是Laskin喷嘴发生的1~10 μm的橄榄油“油雾”[12]。这种方法非常适合应对大功率大流量风机内部流场PIV实验,尤其是对风机进口段和出口段有开放要求、难以采用管路封闭形成循环管路系统的情况。
2 结果与分析
2.1 双吸泵内部流场
由不用流量下叶顶间隙测量区域的速度矢量场图(图4)可知,速度整体分布均匀、过渡平缓,并未见任何速度大小异常的“伪矢量”。速度场中存在着一些流速明显区别于该周围流动速度的点,使得整个流场中的速度不是均匀平滑过渡的,称之为“伪矢量”予以剔除。“伪矢量”是评价粒子图像质量高低一个非常重要的指标。此外,测量区域内抽取的若干点的互相关函数都呈明显的单峰值分布,结果表明粒子图像对的质量较好,所采用的玻璃微珠的撒播技术提升双吸泵的内流场PIV测量效果明显。与此类似,双吸泵出口测量区域的速度矢量场(图5)也未见“伪矢量”,且粒子图相对的互相关函数分布呈显著的单峰分布,表明出口测量区域的粒子图像质量也较高,粒子撒播对其同样有效。

图4 不同流量下叶顶间隙测量区域速度场Figure 4 Velocity distribution of tip-leakage under different flow rates

图5 不同流量下双吸泵出口测量区域速度场Figure 5 Velocity distribution of double-suction pump outlet under different flow rates
从速度等值线图上看,随着流量的增大叶顶间隙区域内的速度大小整体变化不大,而速度的分布更趋均匀,当流量达到201 m3/h时,速度分布又开始出现不均匀分布;出口测量区域的速度则随流量的增大明显增大,速度的方向也略有向上偏转。当流量达到209 m3/h时,速度偏转的角度反而减小。结果表明,在额定流量点附近195 m3/h,出口测量区域的速度分布整体最为均匀,额定流量点以下叶顶间隙的速度分布较为均匀,额定点附近速度分布最为均匀的同时速度整体也最大,超出额定点则在靠近蜗壳壁面区域又开始出现不均匀速度分布且速度整体下降。
叶顶间隙与出口两个测量区域平均速度与流量的关系曲线存在很大差异。由图6可知,叶顶间隙的平均速度及其涨落几乎不受流量变化影响,分别在20 m/s与4 m/s左右。相比之下,在出口测量区域,PIV测得的区域平均速度则随流量的增加有明显的线性增加趋势,而同样条件下发现,两次重复的实验结果在165 m3/h之前吻合性较好,但在165 m3/h之后则呈现明显偏差,说明大流量下该区域的速度分布较不稳定。出口测量区域的相对速度涨落在流量额定点附近达到最小,约为10%~12%,而在远离额定点的小流量和大流量区,相对速度涨落都大于20%。由图7中的汽蚀数据点可知,与水泵正常工作时的平均速度相比,发生汽蚀时出口测量区域的平均速度有较大幅度的下降,幅度可达40%。

图6 叶顶间隙测量区域平均速度与流量关系曲线Figure 6 Relationship between average velocity of tip-leakage and flow rate

图7 出口测量区域平均速度与流量关系曲线Figure 7 Relationship between average velocity of outlet and flow rate
2.2 油烟机PIV内部流场
运用上述油雾粒子的发生和撒播方法,在经过一定时间(单个烟雾发生器约15 min,密封空间体积约200 m3)的示踪粒子撒播,油烟机运行2 min左右就能将示踪粒子均匀充满整个测量区域。捕捉的PIV粒子图像除了整流板、壁面附近区域外,示踪粒子清晰可见,如图8,可以初步表明粒子图像的质量较好。进一步的,由粒子图像对上不同位置上互相关函数突出的单峰分布充分说明相邻时刻捕捉的粒子图像对之间的相关性很强,基于该粒子撒播技术获取的油烟机内粒子图像质量完全符合PIV速度矢量场的求解要求。最后由粒子图像对求解得到的时均速度场,速度矢量分布均匀、有规律;而流线连续有规则,特别是风机入口横向剖面先后测量的4个分区结果拼接出完整、清晰的二次流。可见,上述撒播示踪粒子发生与撒播技术对大流量风机等类似场合确实可行且效果良好。图9和图10给出了油烟机内的流线图和速度矢量图。从四个先后测量的风机入口横向剖面分区的速度矢量场和流线图可知,风机入口存在大尺度的二次流,即完整的大尺度逆时针旋涡,离心入口附近布置的整流板仍无法将这个大尺度旋涡切碎。纵向时均速度场与流线图则表明,离心风机入口的速度分布不均匀,风机入口下部由于距离油烟机整体进风口较近,其所在区域的进风速度明显较大,越往上部进风速度越小,这会导致离心叶轮较大的偏载,一定程度上增加了油烟机的运行噪音[13]。

图8 油烟机入口横向剖面粒子图像Figure 8 Particles images on the cross section at the inlet of range hood

图9 油烟机入口横向剖面流线图Figure 9 Distribution of streamlines on the cross section of range hood inlet
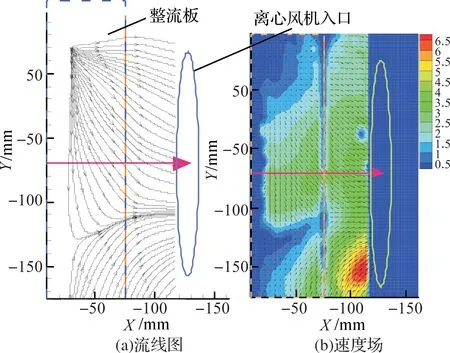
图10 油烟机内入口纵向剖面PIV结果Figure 10 PIV results of the vertical section of range hood inlet
3 结 论
本文针对较大流量、大尺寸的泵与风机进行PIV实验时,示踪粒子发生速率与粒子撒播不均匀影响PIV实验结果的问题,分别提出了针对大功率双吸泵和离心风机的示踪粒子撒播方法。对于大功率双吸泵,利用在循环水池内预先投放适量玻璃微珠,并由双吸泵运行一定时间对示踪粒子进行强迫扩散和循环均匀撒播,获得良好的示踪粒子撒播效果,结合原型泵上改造出的叶顶间隙与出口两个测量区域,最终获得不同流量下这两个区域的速度分布。结果表明,叶顶间隙的速度大小与分布随着流量的增加变化不大;出口局部测量区域的区域平均速度随流量的增加而增加,速度脉动在额定流量点附近达到最小。由于PIV测量的水泵模型是在其原型上直接进行机械改造得到的,因此相比于前人传统的水泵PIV测量模型为整体透明或是压水室盖板之一加工成透明,其测量模型的制造难度及加工成本将大大降低。选择压水室出口上游与多个叶顶间隙作为测量区域可以更加全面准确地反映离心泵内全局流场信息。
而对于大流量油烟机,本实验采用的示踪粒子是Laskin喷嘴发生的1~10 μm的橄榄油“油雾”,跟随性较好。预先在较大封闭实验空间内撒播合适浓度的示踪粒子(油雾),随后运行油烟机一段时间,使得油烟机内部的示踪粒子与封闭空间内充满的示踪粒子达到平衡、均匀,从而满足PIV速度矢量场的求解要求,即获得高互相关性与分辨率的粒子图像对。这种方法较之前示踪粒子通过圆管直接注入油烟机撒播更均匀。
泵与风机的实验结果都表明本文给出的粒子撒播方法对于大流量的泵与风机内部流场PIV测量具有较好效果,即可帮助获取高质量的粒子图像与速度矢量场。