BDS/GPS中长基线宽巷准厘米级RTK算法
2019-05-07高春伟赵利江刘海红
高春伟, 赵利江, 刘海红
(1.青海省基础测绘院,青海 西宁 810000;2.青海省地理国情监测院,青海 西宁 810000)
0 引 言
实时动态(RTK)定位技术已经成为全球卫星导航系统(GNSS)高精度RTK定位领域一种应用最为广泛的定位方法之一[1].常规RTK作业距离一般不超过20 km,随着基线长度的增加,基准站与流动站之间的大气相关性降低,双差后残余的电离层延迟、对流层延迟误差超过半个波长,导致初始化时间长、模糊度解算成功率较低,可靠性也无法得到保证.此外,低高度角卫星的观测值质量较差也是影响模糊度解算的重要因素之一,低高度角卫星不仅电离层延迟误差与对流层延迟误差较大,观测噪声和多路径效应也相对明显.
为了提高模糊度解算成功率和可靠性,缩短初始化时间,文献[2]对我国北斗卫星导航系统(BDS)和美国全球定位系统(GPS)载波相位数据融合和高精度联合定位进行了一定的研究;文献[3]利用10°到40°之间不同截止高度角进行BDS/GPS组合RTK试验,分析了城市峡谷和低高度角多路径较严重情形的定位性能;文献[4]解算22.4 km基线时通过采用部分模糊度固定策略实现了GPS/BDS双频RTK瞬时定位;文献[5]分析比较了三种部分模糊度固定策略在BDS/GPS多频RTK中的效果;文献[6]将低高度角卫星不参与模糊度固定,并验证了BDS/GPS多频非组合动态定位性能;文献[7]利用超宽巷观测值直接定位,并对比了噪声较大的消电离层组合定位效果.
多系统多频组合定位使可用卫星数迅速增加,增强了卫星几何构型,但全模糊度解算成功率有限.为了弱化大气延迟误差对模糊度解算的影响,充分利用宽巷观测值波长较长的优势,并直接利用双系统模糊度固定的宽巷观测值进行定位.本文在研究BDS/GPS宽巷RTK定位方法的基础上,编写程序实现了附加宽巷模糊度参数的卡尔曼滤波方法得到浮点解,通过配置的最小二乘模糊度降相关平差法(MLAMBDA)固定大于设置模糊度解算截止高度角卫星的宽巷模糊度,并进行了RTK定位实验.
1 宽巷模糊度解算模型
1.1 观测模型
GNSS相对定位中,双差观测值不仅可消除接收机钟差和卫星钟差,减少未知参数个数,削弱电离层延迟误差、对流层延迟误差和卫星轨道误差等,而且其双差模糊度具有整数特性[8].GPS与BDS均为码分多址,其双差观测方程如下:
λi·Δφi= Δρ+ΔT-ΔIi+λi·
(1)
(2)
由式(1)、(2)可以得出宽巷观测值的双差观测方程为
(3)
式中,下标wl表示宽巷,GPS由L1和L2组成,BDS由B1和B2组成,波长分别为0.861 9 m和0.847 m.
1.2 附加宽巷模糊度参数的卡尔曼滤波
构造宽巷卡尔曼滤波模型的状态方程和观测方程[9]为
Xk=Φk/(k-1)Xk-1+Wk-1,
(4)
Lk=HkXk+Vk.
(5)
式中:下标k、k-1表示第k时刻和第k-1时刻;Φk/(k-1)为状态转移矩阵;W为系统噪声向量;L为观测值向量;V表示观测噪声向量,其中,状态向量X为
(6)
2 部分模糊度固定策略
通过滤波得到双差模糊度的浮点解以及方差协方差矩阵后,可采用MLAMBDA方法进行模糊度搜索得到固定解.尽管多系统多频联合定位增加了多余观测量个数进而增加了定位模型的强度,但模糊度向量的维数也相应增大,由此导致全模糊度固定困难,相应Ratio值过低,固定成功率不高.动态定位时由于流动站观测低高度角卫星升降变化较频繁,中长基线定位时大气延迟误差残差和观测噪声增大,即使形成双差,残差也较大,残差超过半个波长时对模糊度固定造成较大影响,低高度角卫星尤其明显,故采用宽巷观测值来定位.宽巷观测值波长较长,双差残差一定程度下增大也较易固定,同时采用部分模糊度固定策略设置卫星模糊度解算截止高度角,抑制大气延迟误差和观测噪声极大的低高度角卫星的影响,低于该高度角的卫星不参与模糊度固定,保留其浮点解,使固定相对容易,Ratio值提高,进而提高固定率.
3 实例验证
本文采用的数据是利用GPS/BDS双频华测接收机在我国华北某省采集的3组数据,观测时间为2018-8-27,采样间隔为1 s,时长24 h,基线长分别为25 km,46 km和76 km,分别命名为JX25,JX46和JX76,编写程序实现上述算法.采用动态数据方式处理,所采集数据在8月下旬,故设置卫星模糊度解算截止高度角为25 °,每组基线处理86 400个历元.
将高精度解算软件Gamit10.6处理基线结果作为真实值,计算结果与真实值作差得到东(E)、北(N)、天(U)三个方向的误差值,并绘制模糊度解算得到的Ratio值,如图1~12所示.

图1 JX25E方向差值

图2 JX25N方向差值

图3 JX25U方向差值
图4 JX25 Ratio值

图5 JX46E方向差值
图6 JX46N方向差值
图7 JX46U方向差值

图8 JX46 Ratio值

图9 JX76E方向差值

图10 JX76N方向差值
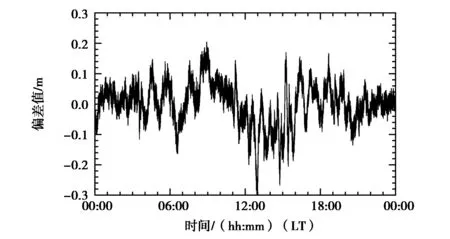
图11 JX76U方向差值

图12 JX76 Ratio值
由图可见,三组基线除14:00-17:00的定位结果跳动较剧烈外,其余时间变化较平缓.14:00-17:00的定位结果对应Ratio值也相对较低,可能是电离层活动较剧烈,导致双差电离层残余延迟误差较大,使得双差模糊度搜索空间较大,但E方向和N方向绝大多数历元偏差在5 cm内,最大偏差达15 cm,U方向除最长的76 km基线其余绝大多数历元偏差不超过10 cm,为准厘米级.
将Ratio阈值设置为3[10],小于3认为未固定,随着基线的增长,Ratio峰值与Ratio较稳定值不断降低.三组基线均处理86 400个历元,JX25未固定历元个数为9个,JX46未固定历元个数为7个,JX76未固定历元个数为32个,使用宽巷观测值定位,即使在流动站观测值误差消除不是很好,残余电离层延迟误差、对流层延迟误差和卫星轨道误差都较大时,采用部分模糊度固定策略,解算模糊度Ratio值仍较大,一个历元即可初始化.
由此可见,宽巷观测值在50 km内具有比较好的定位能力,在50~80 km内也具备分米级定位的能力,中长基线情况下,双频接收机可以选择使用固定率更高的宽巷观测值进行导航定位,从而避免初始化时间长,易受环境影响而需要重新解算或一直浮点解的情况.
为便于分析,将三条基线的各个方向偏差值的标准差(STD)值列于表1,双系统联合定位稳定了卫星几何构型,三条基线的E方向与N方向STD值相似,U方向STD值最大,25 km与46 km基线STD值相似,可见双系统宽巷观测值的定位能力较强.

表1 解算结果定位误差STD值
4 结束语
本文利用三组实测25~76 km基线数据进行了中长基线宽巷准厘米级RTK试验.双系统双频可组成较长波长的宽巷观测值,通过BDS/GPS宽巷卡尔曼滤波方法进行定位,中长基线情况下,采用部分模糊度固定策略仍可一个历元初始化;双系统增强了卫星几何构型使定位结果更加可靠,采用宽巷观测值在电离层活动较剧烈时间忽略电离层的影响也可达到厘米级或接近厘米级的定位精度.
