无刷直流电机控制电路的Multisim设计实训
2019-05-04詹庄春
詹庄春
(华南农业大学 珠江学院信息工程系,广东 广州,510900)
Multisim是电路仿真软件,因其中含有无刷直流电机、直流电机、感应电机、步进电机和同步电机模块[1],所以非常有利于对电机进行初步的控制与分析。无刷直流电动机是最具发展前途的机电一体化电机[2],与普通直流电机相比,它省却了存在电接触的电刷和换向器,聚合了直流电机机械硬特性和交流电机结构简单的优势,为需要调速的应用场合提供了性价比更高的解决方案,但无刷直流电机突出优势的体现有赖于较高的控制技术,即转子位置检测技术[3]和电子换向驱动技术。在此将无刷直流电机的控制仿真放在Multisim软件环境下进行,目的是为应用型教学寻求一种便捷有效的实训途径。
1 无刷直流电机的结构与控制原理
虽然无刷直流电机的结构有很多种,永磁转子有内外之分,磁极数也有1、2、3对之分,定子绕组分二、三、四、五相,绕组接法也分有无中性点,但其控制原理都是一样的[4],如图1(b)所示,即通过转子位置的检测决定逆变器的触发导通,然后直流电源逆变为交流电,定子绕组将沿气隙圆周产生旋转磁场,从而驱动转子同方向旋转。图1(a)为常见的三相两极外转子无刷直流电机结构,其中沿圆周间距120°固定分布的三个霍尔传感器,是一种应用最多的转子位置检测元件,霍尔传感器的核心元件是霍尔片,即通以直流电的一块矩形半导体单晶薄片,当其置于永磁转子磁场中,则输出霍尔电势UH∝IB。当无刷直流电机结构不带传感器时,可采用线反电动势检测法来估计转子的位置[5],即定子绕组线圈相对切割永磁转子磁力线而产生感应电动势,以此估计转子的位置。
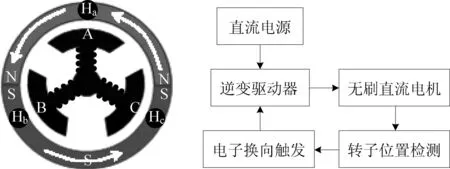
(a)3相2极无刷电机结构 (b)无刷直流电机控制原理 图1 无刷直流电机的结构与控制原理Fig.1 Structure and control principle of a brushless DC motor
2 设计思路
现以定子绕组A相开始正向通电时刻作为电机运行周期的起始点,逆时针为旋转正方向。假设电机采用三相全桥逆变驱动,则在二二导通方式下绕组电流相序为AB-AC-BC-BA-CA-CB-AB,即一个周期共计6次换相。气隙磁场和永磁转子在相邻两次换相期间均旋转60°,而在每相绕组正向或反向通电期间旋转120°。若霍尔电势的正反和绕组通电的有无均以高低电平来表示,则其输出波形如图2所示,图1(a)结构图所示转子位置正处于90°或270°。值得注意的是,霍尔传感器具体位置的安装要与定子绕组通电情况相配合,以定转子之间能够产生最大电磁力矩为原则。

图2 霍尔电势、绕组通电波形图Fig.2 The waveform of Hall potential and winding energized

另一方面,相绕组反电动势指的是对相绕组激励电压的反作用,根据电磁感应原理可知相电压与相电势近似相等。假设相电流为矩形波,则通过设计气隙磁通密度分布可使相电势为梯形波,其信号被加以利用的较多[6]。而相电压受逆变器开关管换相的影响产生尖脉冲,其信号被加以利用的较少[7]。从理论上来讲,当三相正弦波或梯形波交流电对称时,线电压与对应的参考相电压在相位上互差30°,线电压差与相电压具有相同的过零点。也就是说,若将相电压两两比较,再加上比较之后信号的反向,则可得6条信号,然后对这6条信号进行逻辑设计,就可得对应逆变器开关管的6条触发信号。
3 电子换向触发信号的实现
在Multisim元器件库中选出三相交流电源、反相器、电压比较器、二输入与门模型,构建反电动势检测法逻辑电路,如图3(a)所示。对图3(a)电路进行单元测试,结果是:交流电相序为CBA,脉冲s6~s1依次输出。在Multisim元器件库中选出时钟源、反相器、二输入与门模型,构建霍尔电势检测法逻辑电路,如图3(b)所示。对图3(b)电路进行单元测试,结果是:当设置霍尔电势相序为ABC时,脉冲s1~s6依次输出;而当霍尔电势相序为CBA时,脉冲s6~s1依次输出。图3电路输出的逻辑波形与图2理论分析的一致。

图3 电子换向触发信号逻辑电路Fig.3 The logic circuit of the electronic commutation trigger signal
4 控制系统逻辑电路
分别将反电动势和霍尔电势检测法的电子换向触发逻辑电路封装为两个子模块,又从Multisim元器件库中挑选具有霍尔电势和反电动势输出的无刷直流电机、负载、带续流二极管场控功率三极管六只、可调直流电源、三极双向投刀开关和示波器仪表,再按图4所示进行连线,从而构建控制系统逻辑电路。双投开关的作用是实现转子位置检测法的转换,在电机启动时采用霍尔传感器,当电机转速上升至给定值或定时时间到则为反电动势。三相桥式功率开关管的触发信号备有三套,其中霍尔电势检测法的两套分别实现电机的正反转。调节直流电源可调节电机转速。
图4 控制系统逻辑电路Fig.4 The logic circuit of the control system
5 仿真测试
首先,对元器件模型进行参数设置。无刷直流电机:定子相绕组电抗0.15mH、定子相绕组电阻0.6Ω、转速系数0.06/(Vs/rad)、转矩系数0.06/(Nm/A)、磁极对数1,负载转矩0.6e-3Nm,功率管触发电压5V、导通内阻10mΩ、关断阻抗1MΩ,续流二极管导通内阻10mΩ、关断阻抗1MΩ,可调电压最大值100V、最小值0V。控制系统仿真测试输出波形如图5所示,实现了无刷直流电机的正反转及调速。图5(a)中,转速n(rad/s)=测速电压×转速系数,电磁转矩Te(Nm)=转矩电压÷定子相绕组阻抗÷转矩系数。根据电机学理论可知,电磁转矩正比于电枢电流,电枢电流在电机起动或电压波动瞬间较大,相电势即感应电动势正比于转速,可看出该系统测试结果与理论分析一致。

(a)电机转速与电磁转矩随时间的变化
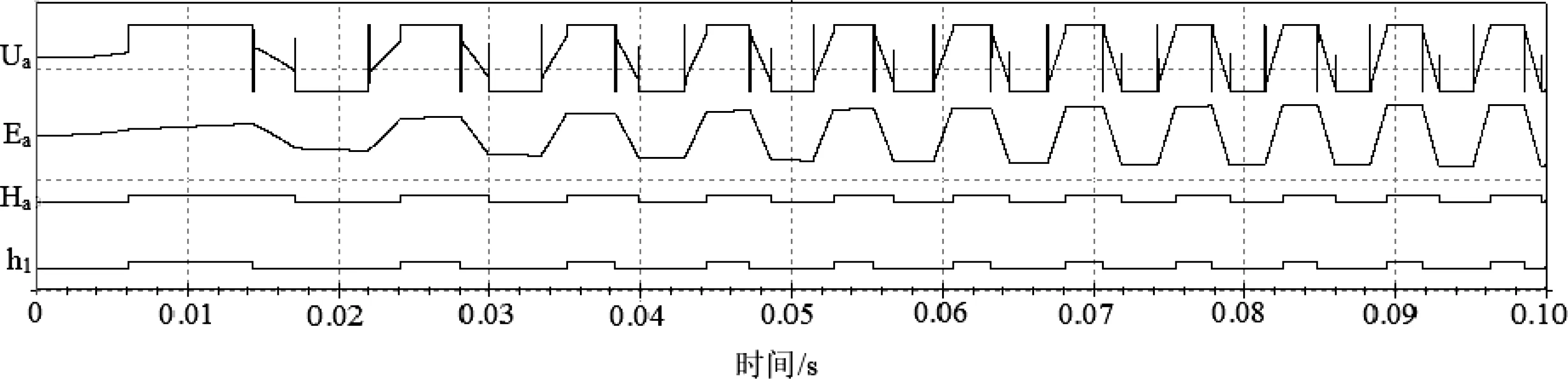
(b)电机起动阶段相电压、相电势、霍尔电势、触发脉冲之间的相位关系图5 控制系统仿真测试输出波形Fig.5 The output waveform of the control system simulation test
6 结语
通过本次的无刷直流电机控制系统逻辑电路设计,可以看出,Multisim电路仿真软件专业性很强[8],无刷直流电机的初步控制与分析得以实现,实训效果很好。应用Multisim不足之处是没有得出电流和电压差输出波形,无刷直流电机转子位置在起动瞬间始终为初始值。为了改善电机运行的动态性能,可以考虑在Multisim平台增加电流滞环控制环节[9],关于无位置传感器无刷直流电机实际起动时如何检测转子位置的问题,还有待进一步研究与设计。
