一种经皮椎体后凸成形术中准确穿刺辅助器械的研制
2019-04-29张吉辉赵刘军顾勇杰于亮王雷宁肖武
张吉辉,赵刘军,顾勇杰,于亮,王雷宁,肖武
1. 宁波市第六医院 脊柱外科,浙江 宁波 315040;2. 宁波大学 医学院,浙江 宁波 315211
引言
目前,经皮椎体后凸成形术(Percutaneous Kyphoplasty,PKP)广泛用于治疗骨质疏松椎体压缩性骨折[1],然而与穿刺相关的并发症,如穿刺损伤神经根、骨水泥渗漏、椎管内血肿、椎弓根骨折等[2-7],限制了PKP术的发展。以往其他学者为避免出现上述并发症,开始对PKP的术前规划进行研究。由于CT及MRI影像系统的普及,临床医生可以在CT及MRI上提前设计进针点及穿刺角度,实际操作时结合术前测量的数据,预先了解定位与穿刺的粗略距离和角度[8-11]。近年来,有学者将3D打印运用至PKP术中[12],虽然穿刺位置与角度更趋于准确化,但仍存在一定的失误率及再手术率。且3D打印技术所耗费用昂贵,操作复杂,难以在众多医疗机构推广运用。因此,如何准确地确定穿刺点、穿刺路径和穿刺角度是亟待解决的问题。鉴于此,本研究设计了PKP准确穿刺辅助器械,通过软件的术前模拟穿刺,可以确定皮肤上穿刺针的进针点及在辅助器械上的进针孔洞,即进针点的位置和穿刺的三维角度,从而使PKP术中穿刺次数减少,穿刺到位时间缩短,穿刺到位时X线透视次数减少,并能够满足临床的需要。
1 设计材料与方法
1.1 设计思路
脊柱具有三维立体结构,为实现精准的穿刺,我们设计的穿刺辅助器械外观为八分之一镂空球体(图1、图2)。该球体的半径为33 mm,厚度为1.5 mm。在球心的位置设计了一个直径为5 mm的孔洞,即皮肤上的定位孔。而在球体表面平均分布有61个直径为4 mm的孔洞,三条最外侧缘上孔洞排列最多,为10个,这些在球体表面的孔洞即为穿刺针的进针孔。通过不同进针孔与定位孔相连,形成不同的进针角度。而在Mimics软件中,我们将穿刺针经椎弓根置于理想位置后可获得该穿刺的三维角度。当模拟的穿刺针在皮肤上的位置与穿刺辅助器械的定位孔相重合,则穿刺针经椎弓根的三维角度正对应穿刺辅助器械上某一个进针孔。

图1 穿刺辅助装置的示意图
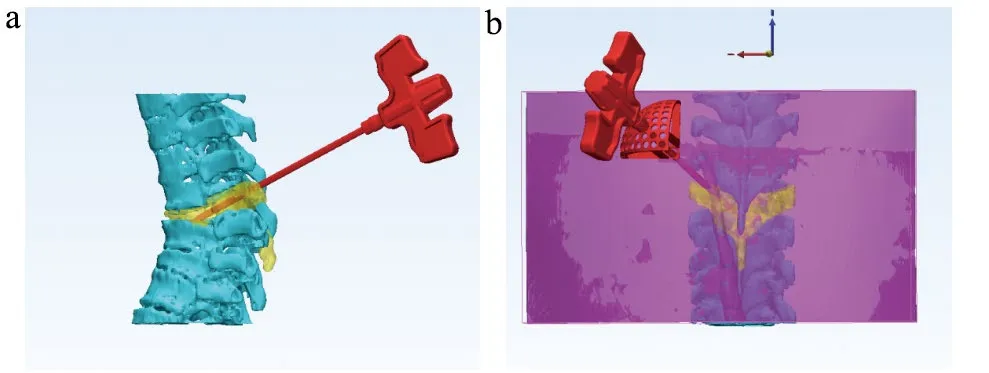
图2 穿刺辅助器械的运用示意图
1.2 材料设计
电脑软件Unigraphics NX 12.0,光敏树脂(丙烯腈-苯乙烯-丁二烯共聚物),金属铝,3D打印机等。
1.3 设计过程
该PKP穿刺辅助器械的运用,是建立在术前模拟PKP手术的基础上进行的。首先将普通金属网格放置于患者伤椎节段相对应的腰背部皮肤表面,同时用记号笔画出该金属网格的轮廓,以备确定其皮肤上的穿刺点。术前行CT薄层扫描时,嘱患者俯卧位,再将金属网格放置于记号笔所画的轮廓内。待扫描后用DVD光盘进行刻盘保存伤椎原始数据,并以DICOM格式导入Mimics软件中。在读取伤椎CT平扫的序列图像后,先通过阈值选取技术,以骨组织的正常密度来选定椎体的骨性结构,使骨性结构与软组织分割开,然后获得椎体的蒙板。同时行金属网格及背部皮肤的三维重建,再与伤椎的模型合并,获得伤椎、金属网格及背部皮肤的三维模型。
使用软件中的MedCAD功能,选取一个直径为3.5 mm的圆柱体代替穿刺针;将圆柱体头端放置于伤椎的理想位置后,调整圆柱体的尾端,使整个圆柱体通过椎弓根,即模拟穿刺路线;再观察圆柱体的尾端,记录其穿出金属网格的位置,该位置对应的背部皮肤位置,即穿刺针的进针点;最后将PKP穿刺辅助器械以STL格式导入软件中,使辅助器械的底座与背部皮肤相平,再将辅助器械中的定位孔与进针点相对应,然后观察圆柱体的尾端,记录其穿出辅助器械的具体进针孔(图2)。
在实际行PKP手术时,先将金属网格放置于轮廓中,根据术前模拟时软件上确定的皮肤进针点,在实际患者皮肤上同样的位置做好标记,作为进针点。再将穿刺辅助器械中的定位孔对应皮肤上的进针点,根据术前得出进针孔的准确位置,经此进针孔进行穿刺,结合术中C臂机X线的照射,使穿刺针达到理想位置(图3)。

图3 穿刺辅助器械实际应用图
2 结果
2.1 设计结果结构
我们设计的穿刺辅助器械外观为八分之一镂空球体。球体表面平均分布有61个孔洞,最外缘均有10个孔洞,相邻孔洞之间的角度差异为10°,其余各排的相邻孔洞之间的差异分别为 11.25°、11.25°、12.86°、15°、18°、22.5°、30°和90°。穿刺辅助器械实物图,见图4。
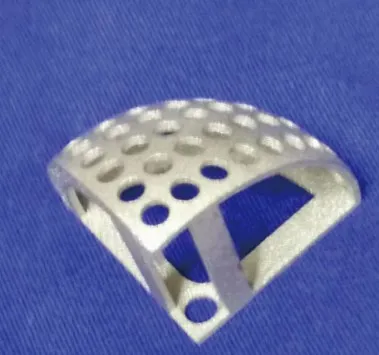
图4 穿刺辅助装置的实物图
2.2 仪器测试结果
通过测试,我们设计的穿刺辅助器械在临床PKP运用中,可使穿刺次数减少,穿刺到位时间缩短,穿刺到位时X线照射次数减少,无骨水泥渗漏、神经损伤症状及感染等并发症的发生(表1)。
表1 仪器测试结果(±s)
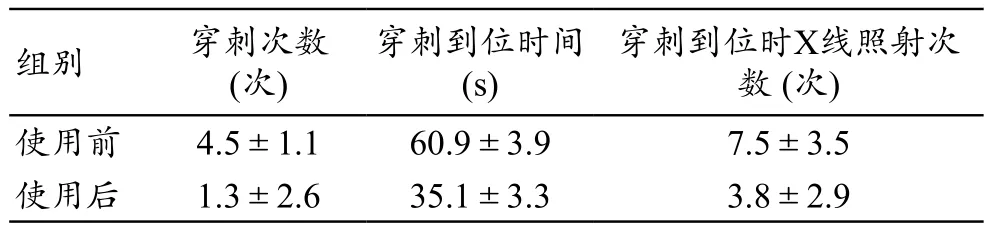
表1 仪器测试结果(±s)
组别 穿刺次数(次)穿刺到位时X线照射次数 (次)使用前 4.5±1.1 60.9±3.9 7.5±3.5使用后 1.3±2.6 35.1±3.3 3.8±2.9穿刺到位时间(s)
3 讨论
本研究使用我们自主设计及研制的PKP穿刺辅助器械,配合Mimics软件,可有效增加穿刺的准确性,使手术医生能够在较短的时间内完成穿刺,从而减少出血,并可以减少患者与医生的X线照射,避免射线对人体过多的危害。
常规经皮椎体后凸成形术为闭合穿刺,单纯在术中X线等影像设备的检测下进行。为增加穿刺的准确性及安全性,国内学者刘小勇等[13],利用10具脊柱标本的X线片确定“标准穿刺轨道”,再根据术前MRI或CT等影像学资料,了解水平面与矢状面经皮进针点与棘突的位置关系。同样国外也有学者通过观察术前的CT及MRI片进行术前穿刺点、穿刺角度的规划,以达到缩短手术时间,减少X线透射的目的[8-11],而此种方式也最为普及,因成本少,所以最易接受。但椎体是三维物体,水平面与矢状面的测量仅仅只能作为大致的参考,而对于经椎弓根穿刺这根“独木桥”,并不能达到完全准确。目前随着各种影像设备、导航及三维数字化技术的发展,使这些技术开始运用于PKP手术的术前与术中定位。通过术前收集的数字点片图像传输至导航系统,进行图像整理、重建,再进行自动注册,完成导航计划。此后的手术操作将会在导航引导下进行,通过导航可以满足对骨性结构精确定位的需要,实现对手术的精确引导[14-17]。但此种技术受限于仪器的成本,不能进行大范围普及。而数字化三维重建技术和相关计算机软件的出现与不断发展为现代骨科手术提供了新途径。王欣文等[12]将伤椎CT扫描检查后,构建三维模型,将其导入Mimics软件中,再按1:1比例打印模型,通过预手术,明确穿刺部位和穿刺路径,确定穿刺内倾的最大角度,然而实际手术时仍无法三维直视目标椎体,仅仅提供大致的轮廓印象,且每个患者都需要进行打印,累加费用较多。
因此,本研究设计及发明了该穿刺辅助器械。本研究中的穿刺辅助器械相对于目前的技术具有以下的创新性:① 通过术前模拟在软件中确定穿刺针的理想位置,经皮肤上的进针点与穿刺辅助装置上的定位孔相重合,可以提前预知穿刺针会经球面上某一个进针孔穿出,该穿刺辅助装置可将穿刺时的三维角度数据转变为球面上的不同进针孔,从而实现三维穿刺,使穿刺更加准确;② 球体表面平均分布有不同的进针孔,在三条最外侧缘上各自分布有10个穿刺孔,故而每个穿刺孔之间存在10°的差异,其他相邻的穿刺孔之间也有不同的角度差异,可供不同患者选择不同的角度,进而实现个体化的穿刺,且在个体化穿刺的基础上,该穿刺辅助器械可消毒后重复使用;③ 我们也对术前放置于患者背部的金属网格进行三维重建,在软件中将穿刺针放置于理想位置后,可根据金属网格确定皮肤上的穿刺点,因此术前可不必对穿刺点的位置进行X线透视;④ 我们的穿刺辅助器械成本仅仅为100元,如果想增加其强度,可使用金属打印,其成本也仅为600元,大幅度降低了成本,广大医疗机构都有能力购买;⑤ 由于该穿刺辅助器械是与Mimics软件相配伍,因而在软件中可通过CT的三维重建,术前即对伤椎的骨折情况有所了解,在模拟置入穿刺针时,可将穿刺针放置于理想位置,从而避开骨折线,防止骨水泥渗漏的发生。
本研究尚有一些不足之处:① 术前在软件中将穿刺针置于理想位置后,有时穿刺针无法完整从进针孔内穿出,则需调整穿刺的位置,从相邻合适的进针孔穿出,使穿刺位置有所改动;② 该穿刺辅助器械的半径为33 mm,如果是肥胖的患者,普通穿刺针的长度难以满意手术的要求,需要再购置长号的穿刺针,但缩短穿刺辅助器械的半径,则会造成球体表面进针孔的数量减少,影响精确穿刺;③患者在术前行CT扫描时,需严格俯卧位,双臂向前抱枕,与手术时的体位一致,否则会因双臂的姿势而改变背部皮肤的位置,影响皮肤上穿刺点的定位,进而影响三维穿刺的角度。
该穿刺辅助器械,可使PKP术中穿刺次数减少,穿刺到位时间缩短,穿刺到位时X线照射次数减少。为使该PKP准确穿刺辅助器械更快进入临床应用,我们将进行后续的临床实验验证其效果,并继续予以改进,且在研发过程中,我们已经申请了专利。希望该穿刺辅助器械可以得到广大学者的认同,使之在临床推广应用。