森林BDS/GPS组合定位算法与精度分析
2019-04-29王春博吴永睿林奕成冯仲科
闫 飞 王春博 吴永睿 林奕成 冯仲科
(1.北京林业大学精准林业北京市重点实验室, 北京 100083; 2.河北省煤田地质局物测地质队, 邢台 054000)
0 引言
林业作为生态文明建设的主体,具有重要的生态、经济、社会和文化等多种功能,为了更好地发挥林业功能、维护森林健康发展,实现林业管理信息化、精准化显得尤为重要。全球卫星导航系统能够为林业资源调查、森林防火和应急指挥、病虫害监测和防治等林业核心业务提供实时准确的位置定位信息、发生范围信息和导航服务[1-4],在林业精细化监测和管理方面发挥着巨大作用,是我国林业资源调查领域研究的热点。
一直以来我国林业卫星导航应用研究多依赖于美国GPS系统,该系统技术相对成熟,用户极其广泛,已经在世界范围内树立起行业地位[5]。1996年,美国CHRISTOPHER等[6]就林冠、地貌和距离对GPS定位精度的影响问题进行了初步研究。MICHAEL等[7]在美国西部的俄勒冈林区,研究了不同森林环境下的GPS精度和可靠性。ISAO等[8]研究了柏树、针叶松、阔叶林等与GPS接收卫星信噪比的关系。在我国,赖家明[9]对GPS定位精度影响因子进行了研究,得出GPS定位精度与林分郁闭度、林分优势树种、观测时段、观测日期等关系较为密切。聂玉藻等[10]、谭伟等[11]针对不同的林冠和山地条件,利用差分GPS定位技术,对其定位效果进行了大量研究,总结归纳了不同地类和地形对GPS定位精度的影响。张慧春等[12]研究了不同立地类型和定位模式对GPS精度的影响。张雪芹等[13]进行了高郁闭林分下的星-地结合定位方法实验。由于受限于单一GPS系统卫星星座布网的特殊性和林地复杂性,致使我国在林区卫星定位的应用研究中,存在林区环境卫星信号差或信号失锁、多路径效应强等问题,使林区定位精度较低甚至无法卫星定位[1,13-14],难以满足部分林区对定位精度的需求。
北斗卫星导航系统(Bei Dou navigation satellite system,BDS)是由我国自主研发的卫星导航系统,能够提供全球性、全天时和全天候高精度自主导航定位服务,系统将由35颗卫星布满MEO、GEO和IGSO 3种不同高度的卫星轨道,预计2020年完成组网[15-17]。截止2018年7月29日,我国已发射34颗北斗导航卫星,由于其特有的GEO和IGSO高轨道卫星和对我国区域的局部增强,使我国全境域内可接收到的卫星数量和信号质量得到大幅提升,即使在受高楼、树木、峡谷等遮挡的恶劣环境下,也可以较GPS系统接收到更多的高仰角可视卫星信号[1,18-19],消除因卫星数较少而形成的间隙时段,削弱多路径效应影响,从而提高了林下定位的准确性和精密度,为深入进行林业卫星定位导航研究提供了重要技术手段。因此,在利用成熟稳定的GPS系统的同时,充分发挥北斗卫星导航系统在我国林业资源信息化调查和管理中的重要作用、加强林业北斗的应用基础研究迫在眉睫。
鉴于此,本文以森林BDS/GPS组合单点定位为主要技术方法,选取北京鹫峰国家森林公园为研究区域,以T-23型多频三星接收机及u-blox NEO-M8T多星座接收模块为数据采集仪器,研究适合森林资源调查精度需求的BDS/GPS组合定位算法,将算法写入RTKLIB软件,实现森林观测点WGS-84坐标系下的三维坐标解算,与单一GPS定位结果进行对比分析,研究高郁闭度森林对卫星可见数、位置精度因子PDOP值、信噪比的影响,并进行精度评定,验证在森林复杂环境下使用多系统定位的优越性,以期为我国北斗卫星导航系统在林业中的应用研究提供理论依据和技术支持。
1 实验概况
1.1 研究区概况
实验区位于北京市海淀区鹫峰国家森林公园,境内山峦绵延、地形复杂,最高峰海拔1 153 m,主峰海拔为465 m。植被以落叶阔叶林为主,在低山(800 m以下)有大片侧柏、油松、栓皮栎、刺槐等人工林与山杏灌丛、荆条灌丛错落分布,中山(800~1 100 m)原生植被为松栎林带,树种多为油松、落叶松,森林覆盖率可达96.4%。本研究区选在公园东侧(40°03′49″N,116°05′51″E),海拔约为130 m,坡度约为22°,坡向为东南。数据采集时间为2018年6月中下旬,由于实验前林区多次降雨,土质较为松软,方便仪器架设。研究区以栓皮栎(Quercusvariabilis)为优势树种,树龄多在30年以上,平均树高达15 m以上,平均胸径为93 cm,枝叶繁茂,郁闭度高达0.82,属于密林(图1)。
1.2 实验仪器及解算软件
所使用的仪器包括三鼎T-23型多频三星接收机(图2a)、u-blox NEO-M8T多星座接收模块(图2b)、三脚架、胸径尺、木桩等,使用软件包括GAMIT与RTKLIB 2.4.3版本,其中GAMIT用于森林观测点WGS-84坐标系下的三维坐标高精度解算以获得其真值,定位精度可达厘米级,RTKLIB用于BDS/GPS组合算法编写、实时单点定位及精度分析(图2c),这两款软件均支持多个GNSS系统标准和精密定位算法研究,可实现GNSS实时定位和后处理解算,是目前研究GNSS组合算法的主流常用软件[20]。

图1 研究区实拍图Fig.1 Real shot photo of study area

图2 实验仪器和解算软件Fig.2 Experimental instrument and solving software
2 研究方法
2.1 观测点定位数据采集
本实验在林分中心位置处设立观测点,要求该位置能够充分代表林分高郁闭度水平,将木桩钉入林地10~15 cm,在其顶部设立并标记观测点,保证其坚固。将u-blox卫星接收机天线紧贴于观测点,保证天线相位中心与观测点处于同一铅垂线上,同时,在观测点位架设三鼎T-23型接收机,经过严格对中整平后,开始接收信号,观测历元不少于200个(图3)。

图3 观测点设置Fig.3 Observation point setting
2.2 森林BDS/GPS算法
森林BDS/GPS组合定位观测模型为
(1)
其中

(2)
ρ(i)——卫星至接收机相位中心几何距离
i——卫星编号c——光速
VtR——接收机钟差
VtS——卫星钟误差
Vion(i)——电离层延迟误差
Vtrop(i)——对流层延迟误差
(X(i),Y(i),Z(i))——卫星i的坐标
(X,Y,Z)——观测点坐标
其中,C、G分别代表BDS、GPS,式中省略了卫星星历误差、多路径误差及测量噪声[21]。
在观测点近似坐标(X0,Y0,Z0)处用泰勒级数展开后可得线性化观测方程,整理后可得间接平差误差方程
V(i)=l(i)VX+m(i)VY+n(i)VZ-cVtR+L(i)
(3)
其中

(4)
(5)
式中V(i)——观测值残差
VX、VY、VZ——观测点坐标改正值
l(i)、m(i)、n(i)——观测点至卫星方向上的方向余弦
L(i)——常数项
ρ(i0)——森林观测点近似位置至第i颗卫星的距离[20-21]
森林BDS/GPS组合定位的误差方程中有4个未知参数,根据最小二乘法则,需要同时观测不少于4颗卫星才能进行位置解算。假设某一观测时刻t,卫星接收机接收到GPS卫星m颗、BDS卫星n颗,根据式(3),组合定位的误差方程可表达为
V=Bx-L
(6)
其中
式中V——观测值残差
B——系数矩阵
x——坐标改正值及接收机钟差
L——常数阵
利用经典最小二乘法可解得观测点三维坐标改正值
x=(BTPB)-1BTPL
(7)
式中P——BDS和GPS卫星观测值权矩阵
最终可得森林观测点在WGS-84坐标系下的坐标
(8)
2.2.1时空统一
卫星导航所采用的时空基准分为时间基准和坐标基准,GPS采用GPS时间系统(GPST)和世界大地坐标系(World geodetic coordinate system 1984,WGS-84),而BDS采用北斗时(BDT)和2000国家大地坐标系(China geodetic coordinate system 2000,CGCS2000)。若采用双系统组合定位,则需要进行二者时空基准的统一。
在空间坐标基准上,WGS-84坐标系和CGCS2000坐标系对于坐标原点、尺度、坐标轴的指向及坐标轴指向随时间变化的定义均相同,只有扁率存在微小差别,影响只有亚毫米级,故两个系统在扁率上的差别可以忽略不计,若根据森林调查精度要求,二者空间坐标基准可视为一致[20]。
对于时间基准,BDT和GPST使用原子时,且采用以秒计数及星期数计数,但二者起算时间不同,BDT和GPST的起始时间相差为1 356个星期。因此,BDT和GPST的时间转换公式为[5]
tBDS=tGPS+1 356×604 800+14
(9)
式中tBDS——北斗时间tGPS——GPS时间
2.2.2高度角定权
在森林中进行定位时,观测点与卫星形成的高度角对观测值定位精度有较大影响,高度角定权是指根据每颗卫星观测时的高度角来确定相应观测值的权重。高度角不同,则测距码传播路径不同,产生的误差也不同。森林中卫星高度角过小,则信号很容易受到树冠遮挡,信号在森林中传播路径也会相应增加,卫星发出的测距码受到电离层延迟、对流层延迟、多路径效应等影响增强,造成站星间距离测量误差增大。因此,采用合理的高度角定权可以获得更加准确的定位结果[20]。针对林区等复杂地形,本文所采用的高度角定权模型为
P=E/90°
(10)
式中E——观测高度角
2.3 精度评定
2.3.1定位精度表征因子分析
卫星可见数、三维点位精度衰减因子(Position dilution of precision,PDOP)、信噪比是表征卫星定位精度的重要指标,通常情况下,卫星可见数越多,卫星与测站所构成的几何图形越好,PDOP值越小,信噪比越高,最终定位结果也越准确。因此,对森林BDS/GPS组合定位与单一GPS定位进行比较时,首先需要对以上三者进行对比分析。本文由RTKLIB软件直接进行实时卫星可见数、PDOP值和信号信噪比数据的读取和输出。
2.3.2定位结果精度分析
本次实验结果从理论精度和实际精度两方面进行比较分析。
(1)理论精度
理论精度计算公式为
D=σ0Q
(11)
其中
Q=(BTPB)-1
式中Q——法方程未知数系数阵逆阵[21]
D——相对应未知参数(X、Y、Z方向接收机钟差)中误差,即理论精度
σ0——单位权中误差
n——观测值个数
(2)实际精度
由于现场定位实际情况复杂,定位结果往往受到偶然误差和残余系统误差的综合影响,意味着实际精度和理论精度可能有一定的差异[22-24],因此,需要对BDS/GPS组合定位结果的实际精度进行估计。利用BDS/GPS组合定位和单一GPS定位所得的三维坐标结果与GAMIT软件载波相位高精度解算观测点坐标真值进行比较(观测值-真值),获得每个历元绝对误差变化情况[25],同时,利用以下公式进行实际定位精度评估。
(12)
式中μX、μY、μZ——X、Y、Z3个方向上的定位实际精度

Xi、Yi、Zi——BDS/GPS组合定位或单一GPS定位解算坐标值
3 结果与定位精度分析
3.1 卫星可见数
利用RTKLIB软件全程记录林下定位期间所能观测到的卫星颗数及相应信号质量,利用软件输出后可得,对于BDS/GPS组合定位,本次观测时段内共有15~23颗卫星用于定位观测,其中包括11颗GPS卫星和12颗BDS卫星(图4)。图5表示接收信号的连续程度,信号接收连续则表明信号质量较高,如图5中G04、G14、C09和C10卫星所示,G23和C03卫星信号时断时续,表明观测期间可能出现卫星失锁情况。另外,BDS/GPS组合定位和单一GPS定位的卫星可见数均多于4颗,满足坐标解算必要观测量的要求,但前者要远高于后者,表明在森林中使用组合定位可以获得更充足的多余观测量进行解算,定位结果也更加准确。
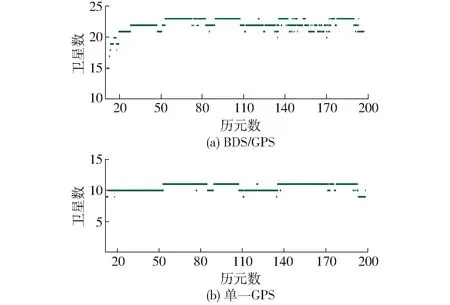
图4 卫星可见数比较Fig.4 Satellite visible number comparison
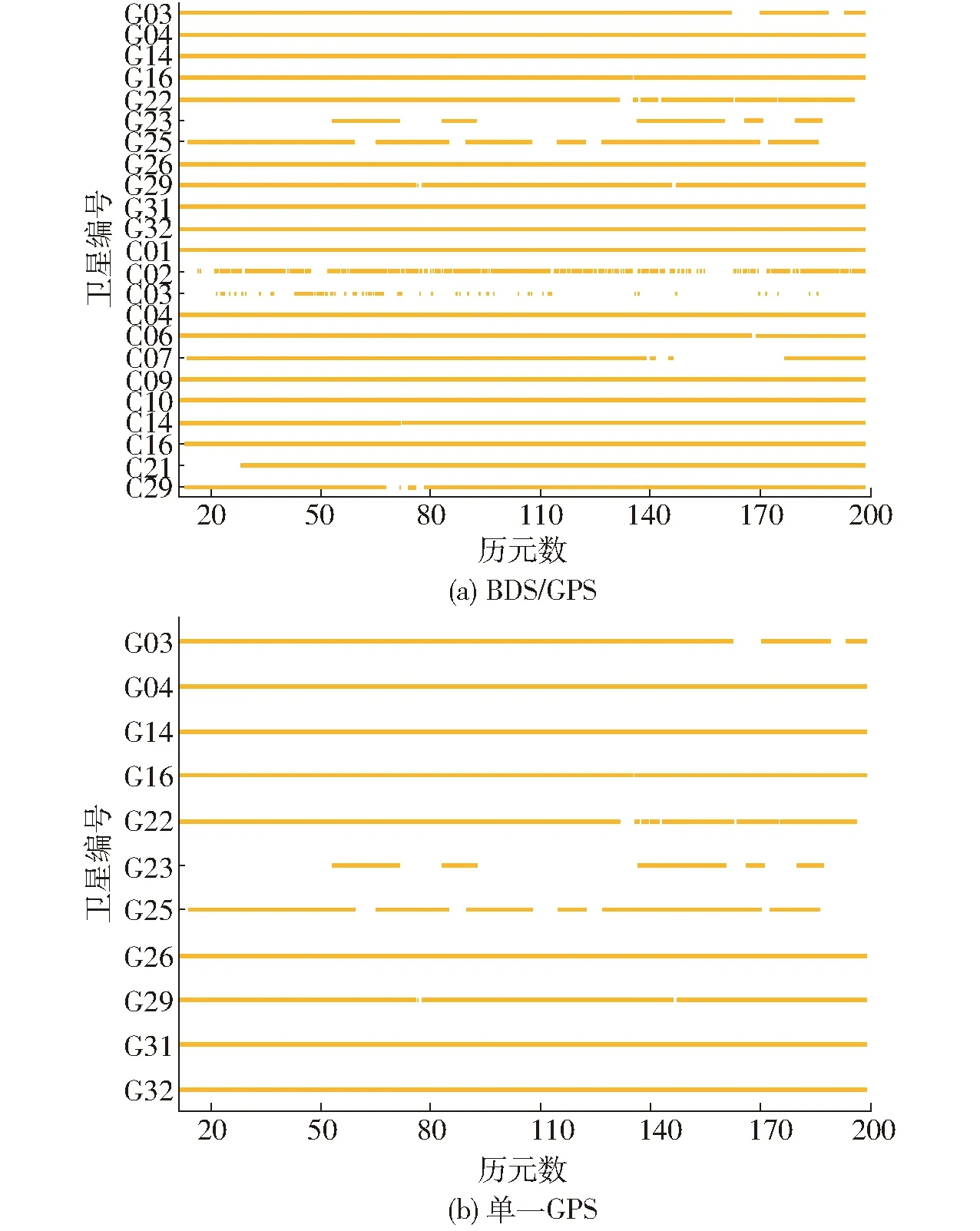
图5 信号连续性比较Fig.5 Signal continuity comparison
3.2 PDOP值
PDOP值指三维点位精度衰减因子,是反映观测时刻观测点与卫星的几何图形强度、衡量卫星导航系统定位能力的一个重要指标[26-27]。经过软件输出,由图6可得,BDS/GPS组合定位观测PDOP值介于0.5~1.8之间且变化平稳,而单一GPS的PDOP值介于1.0~2.1之间,组合定位的PDOP值明显低于单一GPS定位,表明在林下使用BDS/GPS组合定位显著增强了测站与卫星的几何图形强度,从而可使定位结果更为精确。
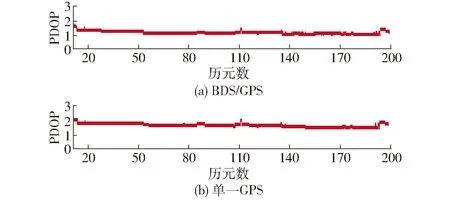
图6 PDOP比较Fig.6 PDOP comparison
3.3 信噪比
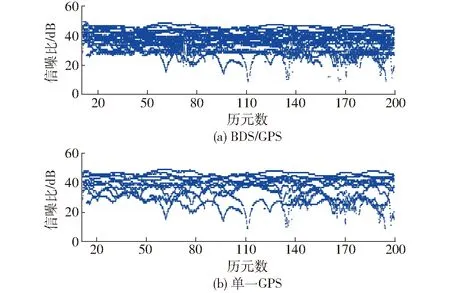
图7 信噪比比较Fig.7 SNR comparison
信噪比(Signal to noise ratio,SNR),指接收机信号强度与噪声强度的比值。信噪比越大,混在信号里的噪声越小,卫星信号质量越好,定位结果也越准确[28-29]。经过软件输出(图7)可得,本次观测卫星信噪比处于10~50 dB,而绝大多数处于30~45 dB,表明卫星信号较强。同时,由于林下采用BDS/GPS组合定位可大大增加卫星观测数,使其SNR较单一GPS的SNR更为稳定,定位精度也更高。
3.4 理论精度
在观测时段中选取信号稳定的连续200组历元通过式(11)进行计算,得到森林BDS/GPS组合定位与单一GPS定位的理论精度(中误差),如表1所示。
表1 定位结果理论精度
Tab.1 Theoretical accuracy of positioning resultsm

由表1可知,在X方向上BDS/GPS组合定位和单一GPS定位中误差相差不大,但在Y、Z方向上组合定位中误差小于单一GPS定位中误差,其结果符合北斗卫星定位系统的布网网型特征[30]。
3.5 实际精度
利用3.4节中相同的解算数据,与观测点真值进行比较得到每个历元观测结果在X、Y、Z3个方向上的绝对误差变化情况,如图8、9所示。

图8 BDS/GPS组合定位在X、Y、Z方向的绝对误差Fig.8 Absolute error of BDS/GPS combined positioning in X, Y and Z directions

图9 单一GPS定位在X、Y、Z方向的绝对误差Fig.9 Absolute error of GPS positioning in X, Y and Z directions
可以发现,森林BDS/GPS组合定位绝对误差均在0 m上下波动,极值不超过8 m,而单一GPS定位绝对误差则远大于组合定位绝对误差,Z方向绝对误差绝对值甚至超过20 m。
利用式(12),对两种林下定位方法的实际精度进行分析[25],得到X、Y、Z方向实际精度如表2所示。
通过两组数据实际精度比较可得,在高郁闭度林分下采用单一GPS进行定位误差较大,Z方向误差可达7.274 m,而BDS/GPS组合定位所得结果与真值更为接近,X、Y方向结果较为一致,Z方向误差相对较大,但整体表现明显优于单一GPS定位。
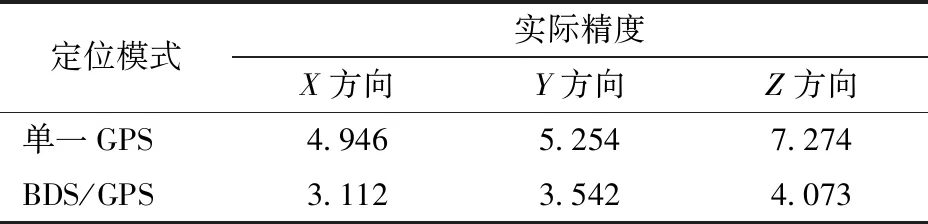
表2 定位结果实际精度Tab.2 Actual accuracy of positioning results m
4 结束语
以北京鹫峰国家森林公园东侧林地为研究区域,通过对北斗卫星导航系统、GPS卫星定位系统之间互操作性转换、系统定权设定、误差源处理,得到BDS/GPS组合定位算法,并将其写入RTKLIB软件,使其能够在接收双星系统信号的同时直接解算得到定位结果。由结果可知,在森林高郁闭度遮挡条件下,BDS/GPS组合定位卫星可见数远高于仅使用单一GPS的卫星可见数;组合定位PDOP值优于单一GPS定位;在信噪比方面,BDS/GPS组合定位卫星信号信噪比较高,也更为稳定;通过对林下定位结果理论精度与实际精度的对比分析得出,BDS/GPS组合单点定位精度要明显优于单一GPS定位。
